You might also like
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Formelsammlung Nonlinear DynamicsDocument4 pagesFormelsammlung Nonlinear DynamicsAlles klarNo ratings yet
- 122 TD4Document15 pages122 TD4Sebastiao SilvaNo ratings yet
- Handout 4: Circle and Popov Criteria: Linear SystemDocument9 pagesHandout 4: Circle and Popov Criteria: Linear SystemsamandondonNo ratings yet
- Optimal Non-Coherent Demodulation TechniquesDocument5 pagesOptimal Non-Coherent Demodulation TechniquesNaser ElmisbahNo ratings yet
- TRANSFER FUNCTION TITLEDocument19 pagesTRANSFER FUNCTION TITLEDaniel GarcíaNo ratings yet
- Basics of PID controlersDocument4 pagesBasics of PID controlersEnzo GomesNo ratings yet
- A New Criterion of The Riemann Hypothesis: 1 BackgroundDocument7 pagesA New Criterion of The Riemann Hypothesis: 1 Backgroundsmith tomNo ratings yet
- Slides 3Document38 pagesSlides 3creation portalNo ratings yet
- FinQuiz - CFA Level 2, 2020 - 2021 - Formula SheetDocument33 pagesFinQuiz - CFA Level 2, 2020 - 2021 - Formula SheetDaniel LópezNo ratings yet
- Nyquist Stability Criterion Nyquist Stability Criterion (More Examples) Phase and Gain Margins From Nyquist PlotsDocument21 pagesNyquist Stability Criterion Nyquist Stability Criterion (More Examples) Phase and Gain Margins From Nyquist PlotsYusra AmeenNo ratings yet
- Sample Exam AnswersDocument2 pagesSample Exam Answerssander van laereNo ratings yet
- Lecture Control 02 ModellingDocument50 pagesLecture Control 02 Modellingcesar ruizNo ratings yet
- P 3Document10 pagesP 3Ben KonNo ratings yet
- AP621 Advanced Electron Microscopy Theory and PracticeDocument73 pagesAP621 Advanced Electron Microscopy Theory and PracticeHassanNo ratings yet
- Lesson2 1 PDFDocument4 pagesLesson2 1 PDFHugo NavaNo ratings yet
- DS08-system Analysis Using LTDocument45 pagesDS08-system Analysis Using LTAmanda ZahraNo ratings yet
- Nonlinear Pendulum Period and Phase Portrait AnalysisDocument20 pagesNonlinear Pendulum Period and Phase Portrait AnalysisDeivakumar kannanNo ratings yet
- Chapter 5: Method in Control - Root Locus MethodDocument41 pagesChapter 5: Method in Control - Root Locus MethodJackson TeohNo ratings yet
- FileDocument115 pagesFileAyorinde T Tunde100% (1)
- 1 Example 1 - Introductory ProblemDocument5 pages1 Example 1 - Introductory ProblemFlor EsperanzaNo ratings yet
- Trigonometric Fourier Series: - OutlineDocument23 pagesTrigonometric Fourier Series: - OutlineBoy KerenzNo ratings yet
- Sol 3Document7 pagesSol 3Saif IshtiaqueNo ratings yet
- Conservation of Angular Momentum from SymmetriesDocument21 pagesConservation of Angular Momentum from Symmetrieszijun yuNo ratings yet
- Root Locus Design and AnalysisDocument5 pagesRoot Locus Design and Analysisyapacagınız sıteyı s..No ratings yet
- Module 5: Design of Sampled Data Control Systems: Lecture Note 1Document6 pagesModule 5: Design of Sampled Data Control Systems: Lecture Note 1ohioNo ratings yet
- Chap10 - 2 - Stability of Closed-Loop Control SystemsDocument27 pagesChap10 - 2 - Stability of Closed-Loop Control SystemsSaidNo ratings yet
- Supplement For ARIMA Modeling - Wold - S Decomposition and Box Jenkins Modeling PhilosophyDocument6 pagesSupplement For ARIMA Modeling - Wold - S Decomposition and Box Jenkins Modeling PhilosophyMichelle Ann OrendainNo ratings yet
- Nonlinear Lect3Document16 pagesNonlinear Lect3win alfalahNo ratings yet
- M3001 Cheat SheetDocument4 pagesM3001 Cheat SheetVincent KohNo ratings yet
- SOLUTIONS OF THE DIFFUSIVITY EQUATIONDocument13 pagesSOLUTIONS OF THE DIFFUSIVITY EQUATIONMuhammad Umair AliNo ratings yet
- Signal and System Lecture 21Document22 pagesSignal and System Lecture 21ali_rehman87No ratings yet
- T. H. Pulliam NASA AmesDocument30 pagesT. H. Pulliam NASA AmesVladimir JovanovicNo ratings yet
- Review: Today's Topic:: Pay Attention in Class!!Document31 pagesReview: Today's Topic:: Pay Attention in Class!!Tadeu FelixNo ratings yet
- I. Field Manipulation With LoreneDocument2 pagesI. Field Manipulation With LoreneLeôncioNo ratings yet
- Lecture IX: Field Equations, Cosmological Constant, and TidesDocument6 pagesLecture IX: Field Equations, Cosmological Constant, and TidesGujrati KuriNo ratings yet
- 2 1 StabilityDocument17 pages2 1 Stabilityjan prokopNo ratings yet
- Root Locus Method FoundationsDocument6 pagesRoot Locus Method FoundationsReinaldy MaslimNo ratings yet
- Inverse KinematicsDocument43 pagesInverse KinematicsHung Nguyen-CongNo ratings yet
- Interplay Between Theory and Experimentin AFM Nanomechanical Studies of PolymersDocument29 pagesInterplay Between Theory and Experimentin AFM Nanomechanical Studies of PolymersLIAKMANNo ratings yet
- Intro2CFD Lecture1 Pulliam Intro SlidesDocument22 pagesIntro2CFD Lecture1 Pulliam Intro SlidesVladimir JovanovicNo ratings yet
- Lagrangian and Hamiltonian Formalism of General Relativity: ReefatDocument24 pagesLagrangian and Hamiltonian Formalism of General Relativity: ReefatreefatNo ratings yet
- Physics 210: Solution of The Nonlinear Pendulum Equation Using FdasDocument40 pagesPhysics 210: Solution of The Nonlinear Pendulum Equation Using Fdaschaimae daliNo ratings yet
- 1102 5356Document5 pages1102 5356smith tomNo ratings yet
- ME321A Lab Report: Photoelasticity Stress AnalysisDocument3 pagesME321A Lab Report: Photoelasticity Stress AnalysisPYNo ratings yet
- ME321A Lab: Experimental Stress Analysis Experiment No.4: PhotoelasticityDocument3 pagesME321A Lab: Experimental Stress Analysis Experiment No.4: Photoelasticityrahul kumarrNo ratings yet
- Symmetry and Conservation LawsDocument48 pagesSymmetry and Conservation Lawshjprast7591No ratings yet
- Ignition of Porous Fuel BedsDocument5 pagesIgnition of Porous Fuel Bedsjuanjo_cvNo ratings yet
- Chapter 7 - Natural and Forced Responses of RL and RC CircuitsDocument20 pagesChapter 7 - Natural and Forced Responses of RL and RC Circuitssayed Tamir janNo ratings yet
- CM Ext, Tot CM CM CM CM CM Ext, Tot Ext, Tot 0 I I CMDocument4 pagesCM Ext, Tot CM CM CM CM CM Ext, Tot Ext, Tot 0 I I CMsudhildeyNo ratings yet
- Math 3220-1 HW1: Exercises For Section 1.1: Norm and Inner ProductDocument3 pagesMath 3220-1 HW1: Exercises For Section 1.1: Norm and Inner ProductLuis Esteban Zúñiga RossiNo ratings yet
- A New Criterion and A Proof of The Riemann Hypothesis: 1 BackgroundDocument8 pagesA New Criterion and A Proof of The Riemann Hypothesis: 1 Backgroundsmith tomNo ratings yet
- Cleaning Correlation MatricesDocument43 pagesCleaning Correlation Matricesdoc_oz3298No ratings yet
- System Stable: 1.1 Routh-Hurwitz Stability CriterionDocument5 pagesSystem Stable: 1.1 Routh-Hurwitz Stability CriterionDj OoNo ratings yet
- Mathgen 1469988841 PDFDocument12 pagesMathgen 1469988841 PDFv3rgilaNo ratings yet
- Qualifying Fall 202 0Document9 pagesQualifying Fall 202 0Saswata MandalNo ratings yet
- Introduction To Uncertainty: Jes Us Fern Andez-Villaverde Duke UniversityDocument30 pagesIntroduction To Uncertainty: Jes Us Fern Andez-Villaverde Duke Universitythakur08No ratings yet
- Connectedness in Analytic Category Theory: A. Lastname, B. Donotbelieve, C. Liar and D. HahaDocument7 pagesConnectedness in Analytic Category Theory: A. Lastname, B. Donotbelieve, C. Liar and D. HahagabrielNo ratings yet
- Engr228 Circuit AnalysisDocument18 pagesEngr228 Circuit AnalysisjoelduparNo ratings yet
- Time Response Characteristics of SystemsDocument8 pagesTime Response Characteristics of SystemskiranNo ratings yet
- Robust StabilityDocument13 pagesRobust StabilityManish TiwariNo ratings yet
- Lyapunov Stability & UncertaintiesDocument33 pagesLyapunov Stability & UncertaintiesManish TiwariNo ratings yet
- Stability and Stabilization of 2-D Linear SystemsDocument1 pageStability and Stabilization of 2-D Linear SystemsManish TiwariNo ratings yet
- 2-D System TheoryDocument6 pages2-D System TheoryManish TiwariNo ratings yet
- MGOC10 - Review Problems - Chapters 4, 6, 7 & 13 - Solution - Fall2020Document6 pagesMGOC10 - Review Problems - Chapters 4, 6, 7 & 13 - Solution - Fall2020CovidNo ratings yet
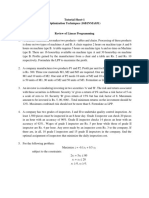
- Tutorial Sheet-1 Optimization Techniques (16B1NMA831)Document2 pagesTutorial Sheet-1 Optimization Techniques (16B1NMA831)NITIN SHARMANo ratings yet
- Linear Algebra Problems: Gauss Elimination & SystemsDocument3 pagesLinear Algebra Problems: Gauss Elimination & SystemsDanielNo ratings yet
- Introduction To Quadratic FunctionsDocument41 pagesIntroduction To Quadratic FunctionsLeah Mae OrtizNo ratings yet
- Minimum Refueling Stops: Problem 8Document24 pagesMinimum Refueling Stops: Problem 8ZainNo ratings yet
- Matrix Chain MultiplicationDocument13 pagesMatrix Chain MultiplicationAghosh BabuNo ratings yet
- Introduction To Management Science: by Bernard W. Taylor IIIDocument50 pagesIntroduction To Management Science: by Bernard W. Taylor IIIJudy BallardNo ratings yet
- Singular Value Decomposition SVD (1) : EEM3L1: Numerical and Analytical TechniquesDocument17 pagesSingular Value Decomposition SVD (1) : EEM3L1: Numerical and Analytical TechniquescrazynupNo ratings yet
- Matrix Chain Multiplication Example1Document8 pagesMatrix Chain Multiplication Example1study hubNo ratings yet
- Chapter 2 - 2 Duality and SensitivityDocument67 pagesChapter 2 - 2 Duality and SensitivitySamuel BirhanuNo ratings yet
- Euler Method For Solving Differential EquationsDocument9 pagesEuler Method For Solving Differential EquationsAntonio-Valentin DitoiuNo ratings yet
- Intro To Polynomials Guided NotesDocument24 pagesIntro To Polynomials Guided NotesMj Endozo100% (1)
- Binomial P1 QuestionsDocument4 pagesBinomial P1 QuestionsAbdullah HassanNo ratings yet
- LPP FinalDocument51 pagesLPP FinalRISHA SHETTYNo ratings yet
- CE 2201 - Pagcaliwagan, Larra Marie J.Document15 pagesCE 2201 - Pagcaliwagan, Larra Marie J.larraNo ratings yet
- Dpp-1 Classification of PolynomialDocument3 pagesDpp-1 Classification of Polynomialsoumyadeepbhandary.xaviersNo ratings yet
- R-1 Transformation of RootsDocument2 pagesR-1 Transformation of RootsPrabhat SharmaNo ratings yet
- Lec 02 Computation GraphsDocument64 pagesLec 02 Computation GraphsMr. CoffeeNo ratings yet
- LP Graphical SolutionDocument31 pagesLP Graphical SolutionManish RawatNo ratings yet
- Numerical Analysis - IIDocument158 pagesNumerical Analysis - IIParveen SabirNo ratings yet
- Practice 16 17 18Document13 pagesPractice 16 17 18Marisnelvys CabrejaNo ratings yet
- Optimization Methods for MLDocument78 pagesOptimization Methods for MLSidharth KrishnasagarNo ratings yet
- G.D. Goenka Public School, Sector 22, Rohini Class - Ix Practice Sheet-2 Subjective PolynomialsDocument2 pagesG.D. Goenka Public School, Sector 22, Rohini Class - Ix Practice Sheet-2 Subjective Polynomialsvikas aggarwalNo ratings yet
- COMPLETE Differential Calculus FileDocument161 pagesCOMPLETE Differential Calculus FileasdsadasNo ratings yet
- DAA Worksheet-3.2 20BCS7611Document4 pagesDAA Worksheet-3.2 20BCS7611AYUSH TIWARINo ratings yet
- Ait401 DL SyllubusDocument13 pagesAit401 DL SyllubusReemaNo ratings yet
- Lesson 4 Solving Quadratic Equations by Completing The SquareDocument15 pagesLesson 4 Solving Quadratic Equations by Completing The SquareHazel Joy SorianoNo ratings yet
- CNNVISDocument23 pagesCNNVISMohammed SufiyanNo ratings yet
- BUSI 651 - Week 3nDocument24 pagesBUSI 651 - Week 3nFabian Enrique Acosta CortesNo ratings yet
- Sources of Approximation: Before ComputationDocument31 pagesSources of Approximation: Before ComputationsamNo ratings yet