You might also like
- How To Use A Multimeter Simplified - A Complete DIY Step by Step Guide On How To Use A Multimeter To Measure Voltage, Current, Resistance, Continuity and in Troubleshooting Circuits PDFDocument30 pagesHow To Use A Multimeter Simplified - A Complete DIY Step by Step Guide On How To Use A Multimeter To Measure Voltage, Current, Resistance, Continuity and in Troubleshooting Circuits PDFilovepieriaNo ratings yet
- SESV8001Document144 pagesSESV8001aliNo ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Electronic Devices and Circuits Lab ManualDocument67 pagesElectronic Devices and Circuits Lab ManualSudha Saravanan100% (3)
- Excitation SystemDocument31 pagesExcitation Systemsrza100% (1)
- Presentation On All Products With Detailed CCV and CTDocument121 pagesPresentation On All Products With Detailed CCV and CTS ManoharNo ratings yet
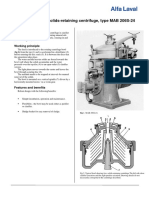
- Alfa-Laval Modelo MAB-206 - Dados TecnicosDocument2 pagesAlfa-Laval Modelo MAB-206 - Dados Tecnicoszzapieche100% (1)
- Pre Commissioning & Commissioning - Procedure & Test Reports - MV SwitchgearDocument123 pagesPre Commissioning & Commissioning - Procedure & Test Reports - MV Switchgearpowermurugan50% (4)
- Model of MINI UPS SystemDocument38 pagesModel of MINI UPS Systemanand_sah51133% (3)
- Installation of Vibration Sensors: A GuideDocument8 pagesInstallation of Vibration Sensors: A GuidenmguravNo ratings yet
- Unit 6 Conductors and Wiring AccessoriesDocument23 pagesUnit 6 Conductors and Wiring AccessoriesRN EGNo ratings yet
- 8 Essential KPIs For Maintenance Management - TRACTIANDocument26 pages8 Essential KPIs For Maintenance Management - TRACTIANsatya krishna chagantiNo ratings yet
- Technical Service Information: Chrysler TransmissionsDocument6 pagesTechnical Service Information: Chrysler TransmissionsStephany castroNo ratings yet
- 70-279 IvoDocument6 pages70-279 IvoAlhexander ValegaNo ratings yet
- AC DC AcDocument3 pagesAC DC AcPhani KumarNo ratings yet
- TN22 Vibration Sensor Wiring and Cabling 1Document11 pagesTN22 Vibration Sensor Wiring and Cabling 1Suresh KumarNo ratings yet
- Chapter 6 16052020 045213pm 19062023 052331pmDocument49 pagesChapter 6 16052020 045213pm 19062023 052331pmAbdullah ZamirNo ratings yet
- 5990 6745enDocument5 pages5990 6745enDevni SyafriantoNo ratings yet
- Cable Fault DetectorDocument25 pagesCable Fault DetectorHarshalNo ratings yet
- CTC Bias Voltage Apps Note 3-14-10Document1 pageCTC Bias Voltage Apps Note 3-14-10rodrurenNo ratings yet
- Field Wiring and Noise Considerations for Analog SignalsDocument13 pagesField Wiring and Noise Considerations for Analog SignalsPhung TuminhNo ratings yet
- Instrumentation TutorialDocument13 pagesInstrumentation TutorialAsif HamidNo ratings yet
- Bxe unit 4Document12 pagesBxe unit 4aryaagharkar7No ratings yet
- Current SensingDocument6 pagesCurrent Sensingboslim1580No ratings yet
- 3 Signal Conditioning: Figure 1. Sensor ModelsDocument1 page3 Signal Conditioning: Figure 1. Sensor ModelsHadi KhanmohammadiNo ratings yet
- Voltage Divider ExperimentDocument14 pagesVoltage Divider ExperimentDave Vic Solis100% (2)
- Understanding The Basics of Current Sensing CircuitsDocument8 pagesUnderstanding The Basics of Current Sensing CircuitsjackNo ratings yet
- 4200 Pulsed-IV ApplicationsGuideDocument75 pages4200 Pulsed-IV ApplicationsGuideStefan-Marian IordacheNo ratings yet
- Fundamentals of Floating Measurements and Isolated Input Oscilloscopes - Tektronix - 3AW - 19134 - 2 - MR - LetterDocument8 pagesFundamentals of Floating Measurements and Isolated Input Oscilloscopes - Tektronix - 3AW - 19134 - 2 - MR - LetterluroguitaNo ratings yet
- Current Clamp Adaptor For Multimeters: by John ClarkeDocument7 pagesCurrent Clamp Adaptor For Multimeters: by John Clarkemor3danNo ratings yet
- Measurement of Current With A Voltage DAQDocument3 pagesMeasurement of Current With A Voltage DAQKh SabNo ratings yet
- NI Tutorial 6940Document5 pagesNI Tutorial 6940veerendraNo ratings yet
- Chapter 6 Pulse ProcessingDocument24 pagesChapter 6 Pulse ProcessingZidan HoumaniNo ratings yet
- Electronics workshop lab instruments guideDocument9 pagesElectronics workshop lab instruments guidechinnu0% (1)
- Electronic Workshop 2nd Experiment3Document9 pagesElectronic Workshop 2nd Experiment3chinnuNo ratings yet
- UNIT8Document30 pagesUNIT8Karthik VNo ratings yet
- Electronics Lab 9Document6 pagesElectronics Lab 9bhojiaNo ratings yet
- NI TutorialDocument13 pagesNI TutorialguillemudryNo ratings yet
- HP-AN1246 - Pulsed Characteristics of Power Semiconductors Using Electronic LoadsDocument8 pagesHP-AN1246 - Pulsed Characteristics of Power Semiconductors Using Electronic Loadssirjole7584No ratings yet
- Fundamentals of Floating Measurements and Isolated Input OsciiloscopesDocument8 pagesFundamentals of Floating Measurements and Isolated Input OsciiloscopesKatherine MccoyNo ratings yet
- Servicing PLC 120V I/O Modules: 0 CommentsDocument49 pagesServicing PLC 120V I/O Modules: 0 CommentsrajuanthatiNo ratings yet
- How To Measure VoltageDocument5 pagesHow To Measure VoltageSonyAcerNo ratings yet
- A Fully Isolated Delta-Sigma ADC For Shunt Based Current SensingDocument9 pagesA Fully Isolated Delta-Sigma ADC For Shunt Based Current Sensingpramani90No ratings yet
- Previo Tele 1Document14 pagesPrevio Tele 1Kevin SacaNo ratings yet
- Circuit Lab EXP1Document9 pagesCircuit Lab EXP1kmmsd57h7cNo ratings yet
- NI Tutorial 6940 enDocument6 pagesNI Tutorial 6940 enOleksandr HusievNo ratings yet
- Isolated Open Loop Current Sensing Using Hall Effect Technology in An Optimized Magnetic CircuitDocument12 pagesIsolated Open Loop Current Sensing Using Hall Effect Technology in An Optimized Magnetic Circuitapi-3805241No ratings yet
- LIC Question BankDocument7 pagesLIC Question BankParvathy S ParvathyNo ratings yet
- Objectives: I. DC Circuit BasicsDocument10 pagesObjectives: I. DC Circuit BasicsNabeeL 6669No ratings yet
- Relay operating principles detection of faultsDocument5 pagesRelay operating principles detection of faultsmuez zabenNo ratings yet
- Sensors & ActuatorsDocument67 pagesSensors & Actuatorsmahendra naik100% (2)
- Ecd Manuals 1-7Document46 pagesEcd Manuals 1-7Muhammad Hozaifa100% (1)
- Background of The Study 2. Statement of The Problem 3. Objectives 4. Significance 5. Scope and Limitations 6. Definition of Terms 7. Theoretical Framework RRLDocument15 pagesBackground of The Study 2. Statement of The Problem 3. Objectives 4. Significance 5. Scope and Limitations 6. Definition of Terms 7. Theoretical Framework RRLJoshua KoppinNo ratings yet
- Simple two diode current limiter protects power suppliesDocument2 pagesSimple two diode current limiter protects power suppliesnassimNo ratings yet
- BuzzerDocument5 pagesBuzzerHehe_09No ratings yet
- Ammeter and Voltmeter:: Basic ElectronicsDocument18 pagesAmmeter and Voltmeter:: Basic ElectronicsSreejithNo ratings yet
- 4-20ma Current LoopsDocument7 pages4-20ma Current LoopsRavi BiradarNo ratings yet
- Monitoring Transmission Line Faults Using MicrocontrollerDocument16 pagesMonitoring Transmission Line Faults Using MicrocontrollerVikash Vicky KumarNo ratings yet
- Signal Conditioning Tutorial: Figure 1. Signal Conditioning Is An Important Component of A PC-based DAQ SystemDocument5 pagesSignal Conditioning Tutorial: Figure 1. Signal Conditioning Is An Important Component of A PC-based DAQ SystemYehia ElmansyNo ratings yet
- An203 - c8051fxxx Printed Circuit Board Design Notes - Silicon - LabsDocument22 pagesAn203 - c8051fxxx Printed Circuit Board Design Notes - Silicon - LabsEdson PaivaNo ratings yet
- Project 2 ElectronicDocument23 pagesProject 2 ElectronicOmar Eduardo Rios GuzmanNo ratings yet
- Unit 3. Signal ConditioningDocument17 pagesUnit 3. Signal Conditioningjose joseNo ratings yet
- EE - 111 Basic Electronics: Experiment # 1Document8 pagesEE - 111 Basic Electronics: Experiment # 1khazima UmairNo ratings yet
- Experiment1-Multimeter, Oscilloscope and Function GeneratorDocument11 pagesExperiment1-Multimeter, Oscilloscope and Function GeneratorHilmi SulimanNo ratings yet
- DC BiasingDocument9 pagesDC BiasingnagarajNo ratings yet
- Relayoperationprinciples 141126065914 Conversion Gate01Document43 pagesRelayoperationprinciples 141126065914 Conversion Gate01kenlavie2No ratings yet
- Assigment Industrial Instrumentation - Capacitive Comparison BridgeDocument7 pagesAssigment Industrial Instrumentation - Capacitive Comparison BridgeAriff Ikhzam Mohd MufaradziNo ratings yet
- Test Equipment For AC/DC Drive and Power Electronic MeasurementsDocument6 pagesTest Equipment For AC/DC Drive and Power Electronic MeasurementsLin ChongNo ratings yet
- ProcessSystems EfficientlyManageVerticalTurbinePumpThrustLoads WhitePaperDocument4 pagesProcessSystems EfficientlyManageVerticalTurbinePumpThrustLoads WhitePapersatya krishna chagantiNo ratings yet
- Varnish Important LiteratureDocument7 pagesVarnish Important Literaturesatya krishna chagantiNo ratings yet
- Best-Practices-of-Mechanical-Drive-Steam-Turbines EmersonDocument30 pagesBest-Practices-of-Mechanical-Drive-Steam-Turbines Emersonsatya krishna chagantiNo ratings yet
- Designation System - SKFDocument1 pageDesignation System - SKFsatya krishna chagantiNo ratings yet
- 3 KPIs Every Facility Should Be Tracking - Vector SolutionsDocument7 pages3 KPIs Every Facility Should Be Tracking - Vector Solutionssatya krishna chagantiNo ratings yet
- The Top 3 Condition Monitoring KPIsDocument10 pagesThe Top 3 Condition Monitoring KPIssatya krishna chagantiNo ratings yet
- Hazardous Area Classifications - A Comprehensive Safety GuideDocument26 pagesHazardous Area Classifications - A Comprehensive Safety Guidesatya krishna chagantiNo ratings yet
- KPIs and Performance - Helmut Salsland - BRCE2016Document26 pagesKPIs and Performance - Helmut Salsland - BRCE2016satya krishna chagantiNo ratings yet
- Reliability Education - Faraday PredictiveDocument25 pagesReliability Education - Faraday Predictivesatya krishna chagantiNo ratings yet
- DBX 90 Microlog SKFDocument6 pagesDBX 90 Microlog SKFsatya krishna chagantiNo ratings yet
- 7 Essential Predictive Maintenance Indicators (KPIs) To Track - RELIABILITY CONNECT®Document11 pages7 Essential Predictive Maintenance Indicators (KPIs) To Track - RELIABILITY CONNECT®satya krishna chagantiNo ratings yet
- Alfa Laval Mab 103Document12 pagesAlfa Laval Mab 103satya krishna chagantiNo ratings yet
- Alfa Laval Mab 103 881145 09 02 Rev4Document164 pagesAlfa Laval Mab 103 881145 09 02 Rev4satya krishna chagantiNo ratings yet
- MPC Varnish Potential TestingDocument3 pagesMPC Varnish Potential Testingsatya krishna chagantiNo ratings yet
- A Review of Aerodynamically Induced Forces Acting On Centrifugal CompressorsDocument35 pagesA Review of Aerodynamically Induced Forces Acting On Centrifugal Compressorssatya krishna chagantiNo ratings yet
- Analyzing and Resolving An ID Fan Failure Due To Torsional VibrationDocument16 pagesAnalyzing and Resolving An ID Fan Failure Due To Torsional Vibrationsatya krishna chagantiNo ratings yet
- Bearing - Fatigue - Detrimental - Effect - of - Carbide - Segregation - 1656790831 2022-07-02 19 - 41 - 12Document7 pagesBearing - Fatigue - Detrimental - Effect - of - Carbide - Segregation - 1656790831 2022-07-02 19 - 41 - 12satya krishna chagantiNo ratings yet
- Motor Compressor Coupling FailureDocument18 pagesMotor Compressor Coupling Failuresatya krishna chagantiNo ratings yet
- Bearing Handling CommentaryDocument10 pagesBearing Handling Commentarysatya krishna chagantiNo ratings yet
- AC - Motor - Bearing - Failure - Due - To - Electrical - Discharge - 1656791145 2022-07-03 16 - 43 - 55Document34 pagesAC - Motor - Bearing - Failure - Due - To - Electrical - Discharge - 1656791145 2022-07-03 16 - 43 - 55satya krishna chagantiNo ratings yet
- A Solution To Years of High Vibration Problems WaukeshaDocument27 pagesA Solution To Years of High Vibration Problems Waukeshasatya krishna chagantiNo ratings yet
- Condition Monitoring Ensures Against Mechanical Failure 020912Document8 pagesCondition Monitoring Ensures Against Mechanical Failure 020912satya krishna chagantiNo ratings yet
- Seminar Report on Traction DrivesDocument15 pagesSeminar Report on Traction DrivesDev KumarNo ratings yet
- Tonepad BigmuffDocument2 pagesTonepad BigmuffArley GomesNo ratings yet
- ENT 162 Analog Electronics Tutorial SolutionsDocument10 pagesENT 162 Analog Electronics Tutorial Solutionser denice catamoraNo ratings yet
- Enrique Fajardo Bible Baptist ChurchDocument1 pageEnrique Fajardo Bible Baptist ChurchAaron CayasNo ratings yet
- P0803BDG Unikc PDFDocument5 pagesP0803BDG Unikc PDFSantiago DiosdadoNo ratings yet
- T-568A and T-568B Ethernet Cable Standards ExplainedDocument3 pagesT-568A and T-568B Ethernet Cable Standards ExplainedLyca Den DewNo ratings yet
- Reference Earthing Thumb Rules 13Document4 pagesReference Earthing Thumb Rules 13Jesus RodriguezNo ratings yet
- Denon Dcm-500aeDocument17 pagesDenon Dcm-500aeJULIUSNo ratings yet
- Model CP 35 Control Panel Data Sheet A6V10238722 Us enDocument4 pagesModel CP 35 Control Panel Data Sheet A6V10238722 Us enSalley BukhariNo ratings yet
- How To Make SMPS Pass Surge & Lightning TestDocument10 pagesHow To Make SMPS Pass Surge & Lightning TestdcasdcasdcasdcNo ratings yet
- Stepper Motor Driver: Semiconductor Technical DataDocument6 pagesStepper Motor Driver: Semiconductor Technical Dataالكترونيات يافاNo ratings yet
- Brochure Victron EnergyMulti RS SolarDocument2 pagesBrochure Victron EnergyMulti RS SolarSINES FranceNo ratings yet
- Sigma II Servo System Product Catalog Supplement 2009Document202 pagesSigma II Servo System Product Catalog Supplement 2009Trí ChốtNo ratings yet
- LossesDocument14 pagesLossesNANDHAKUMAR ANo ratings yet
- Igbt Module BSM15GD120Document9 pagesIgbt Module BSM15GD120nadeem hameedNo ratings yet
- Starting Large Synchronous Motors in Weak Power SystemsDocument8 pagesStarting Large Synchronous Motors in Weak Power SystemsprseNo ratings yet
- EE3011Document1 pageEE3011Shreeyank SinghviNo ratings yet
- Section 16342 - Metal Clad SwitchgearDocument3 pagesSection 16342 - Metal Clad SwitchgearMahyar MashayekhiNo ratings yet
- Mini Project ReportDocument4 pagesMini Project ReportHarsha VardhiniNo ratings yet
- ST20384-A CFK-300 PAU IngDocument5 pagesST20384-A CFK-300 PAU IngRicardo Jose Vazquez AlvarezNo ratings yet
- Smoke Cloak ManualDocument36 pagesSmoke Cloak ManualJonathan Pérez SalazarNo ratings yet
- Um Inverex (Z)Document11 pagesUm Inverex (Z)Sayed Kifayat Hussain NaqviNo ratings yet
- 05 Wiring Diagram PDFDocument7 pages05 Wiring Diagram PDFJorge Tom Simpson CruzNo ratings yet