You might also like
- ES221 Lecture 4Document20 pagesES221 Lecture 4Kent AragonNo ratings yet
- ES221 Lecture 5Document29 pagesES221 Lecture 5Kent AragonNo ratings yet
- ES221 Lecture 3Document25 pagesES221 Lecture 3Kent AragonNo ratings yet
- ES221 Lecture 6Document11 pagesES221 Lecture 6Kent AragonNo ratings yet
- Mechanics: Problems in Undergraduate PhysicsFrom EverandMechanics: Problems in Undergraduate PhysicsRating: 3.5 out of 5 stars3.5/5 (2)
- Syllabus Engineering Mechanics - GE23211Document2 pagesSyllabus Engineering Mechanics - GE23211harishaerophdNo ratings yet
- VECTOR MECHANICS FOR ENGINEERS Chapter 16Document19 pagesVECTOR MECHANICS FOR ENGINEERS Chapter 16Yohanes Elia PNo ratings yet
- EM Lecture Notes Module-5Document36 pagesEM Lecture Notes Module-5elinNo ratings yet
- Kinetics of Part W 5 and W 6Document24 pagesKinetics of Part W 5 and W 6TESFAMICHAELNo ratings yet
- Lecture 8 - ME 241 - 15 Sept 2015Document17 pagesLecture 8 - ME 241 - 15 Sept 2015kumar7aritra7royNo ratings yet
- Lecture 1423904717Document102 pagesLecture 1423904717moondonoo7No ratings yet
- EME 1202 Lecture 1Document21 pagesEME 1202 Lecture 1MAENYA BRUCE OYONDINo ratings yet
- Collection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyFrom EverandCollection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyRating: 3 out of 5 stars3/5 (2)
- Dynamics Module 4Document8 pagesDynamics Module 4Dean Albert ArnejoNo ratings yet
- ME0022 Dynamics: L4, L5 2D Kinematics of A Rigid BodyDocument17 pagesME0022 Dynamics: L4, L5 2D Kinematics of A Rigid BodyKevin SacaNo ratings yet
- Chapter 12 Kinematics of A ParticleDocument86 pagesChapter 12 Kinematics of A ParticleDawood AbdullahNo ratings yet
- I. v. Meshchersky - Collection of Problems in Theoretical Mechanics (The Higher School Publishing House)Document305 pagesI. v. Meshchersky - Collection of Problems in Theoretical Mechanics (The Higher School Publishing House)Samar PratapNo ratings yet
- Direct Stiffness MethodDocument18 pagesDirect Stiffness MethodJayChristian Quimson100% (1)
- Equations of Motion and Rectilinear Motion ExamplesDocument16 pagesEquations of Motion and Rectilinear Motion Examplesarunscribd20No ratings yet
- ME 234 Mechanics of Materials - I: Lecture 10 - StrainDocument24 pagesME 234 Mechanics of Materials - I: Lecture 10 - Strainabdullah bin masoodNo ratings yet
- ME 234 Mechanics of Materials - I: Lecture 10 - StrainDocument24 pagesME 234 Mechanics of Materials - I: Lecture 10 - Strainabdullah bin masoodNo ratings yet
- (Slides) DORB001 - FINAL PROJECT Group 1 - Apongol, Armea, ArceoDocument40 pages(Slides) DORB001 - FINAL PROJECT Group 1 - Apongol, Armea, ArceoTrina ArmeaNo ratings yet
- Lecture 1 - Introduction and StaticsDocument56 pagesLecture 1 - Introduction and StaticsMaro IdehNo ratings yet
- Planar Kinematics of Rigid Body NotesDocument79 pagesPlanar Kinematics of Rigid Body NotesYadanaNo ratings yet
- Swing-Free Stop Control of Mobile Crane Slewing MotionDocument10 pagesSwing-Free Stop Control of Mobile Crane Slewing MotionOkgi KuswoyoNo ratings yet
- Unit 2 (Finite Transformation)Document28 pagesUnit 2 (Finite Transformation)Meenakshi PriyaNo ratings yet
- Module 1Document62 pagesModule 1Nazim ur rehmanNo ratings yet
- Ch-2 - Position and DisplacementDocument7 pagesCh-2 - Position and DisplacementAdil Ali ShahNo ratings yet
- Lecture 13 - ME 241 - 07 Oct 2015 (Just Ekta Prob Ache)Document19 pagesLecture 13 - ME 241 - 07 Oct 2015 (Just Ekta Prob Ache)kumar7aritra7royNo ratings yet
- Module IDocument27 pagesModule IManikandan SriramNo ratings yet
- Dinamika - 1 Kinematika Benda TegarDocument36 pagesDinamika - 1 Kinematika Benda TegarFirman Ali NuryantoNo ratings yet
- Statics: Engineering MechanicsDocument31 pagesStatics: Engineering MechanicsFrensey JynethNo ratings yet
- ME101 Lecture33 KDDocument15 pagesME101 Lecture33 KDSatish Chandra BeraNo ratings yet
- Rigid Body Statics09 2Document9 pagesRigid Body Statics09 2MaraToriagaNo ratings yet
- Rigid Bodies and Rotation: Rotational MotionDocument11 pagesRigid Bodies and Rotation: Rotational MotionnehabodhNo ratings yet
- PCC ENG 220 DynamicsDocument3 pagesPCC ENG 220 DynamicsSyedSirajulHaqNo ratings yet
- Intro To STATICS - Newtons Laws - SI Systems - Performing Reports and TestsDocument2 pagesIntro To STATICS - Newtons Laws - SI Systems - Performing Reports and TestsPhi NguyenNo ratings yet
- MECH223- Final LEcture No. 1 (Plane Motion of Rigid Bodies)Document20 pagesMECH223- Final LEcture No. 1 (Plane Motion of Rigid Bodies)Ibo, Kim CaesarNo ratings yet
- CHP 1 Intro To Mechanisms & AnalysisDocument18 pagesCHP 1 Intro To Mechanisms & AnalysisabinmwangiNo ratings yet
- EMD610S Rigid Body Dynamics Plane MotionDocument23 pagesEMD610S Rigid Body Dynamics Plane MotionCheccu PjanicNo ratings yet
- ME 221 Statics Lecture #14 Sections 7.1 - 7.4Document20 pagesME 221 Statics Lecture #14 Sections 7.1 - 7.4عبداللهأحمدNo ratings yet
- 1 EBSD PrincipleDocument49 pages1 EBSD PrincipleandrianidebrinaNo ratings yet
- Nonlinear Dynamic Response of Elastic Slider-Crank MechanismDocument12 pagesNonlinear Dynamic Response of Elastic Slider-Crank MechanismsrideviNo ratings yet
- Ge6253 Engineering Mechanics L T P c3 1 0 4Document1 pageGe6253 Engineering Mechanics L T P c3 1 0 4VarunNo ratings yet
- 11 Physics Notes 05 Motion of System of Particles and Rigid BodyDocument17 pages11 Physics Notes 05 Motion of System of Particles and Rigid Bodychinmay2882No ratings yet
- ENGINEERING MECHANICS SYLLABUSDocument146 pagesENGINEERING MECHANICS SYLLABUSDARSAN DEVANANDNo ratings yet
- Hyperbolic Structures: Shukhov's Lattice Towers - Forerunners of Modern Lightweight ConstructionFrom EverandHyperbolic Structures: Shukhov's Lattice Towers - Forerunners of Modern Lightweight ConstructionNo ratings yet
- IWSD - Module 2-2 - 1 Static EquilibriumDocument67 pagesIWSD - Module 2-2 - 1 Static EquilibriumPourya NouryNo ratings yet
- Jseam 2020 182Document11 pagesJseam 2020 182Frankie KowaNo ratings yet
- Chapter 1: Introduction: Mechanic Static DynamicDocument8 pagesChapter 1: Introduction: Mechanic Static DynamicAlia RizalNo ratings yet
- ME-346 Lab SheetDocument17 pagesME-346 Lab SheetZayed KhanNo ratings yet
- Introduction To MechanismsDocument95 pagesIntroduction To Mechanismskristeen78100% (1)
- Dynamics: Kinematics of Rigid BodiesDocument12 pagesDynamics: Kinematics of Rigid BodiesAizuddinNo ratings yet
- Engineering Mechanics 2 Marks and 11 MarksDocument89 pagesEngineering Mechanics 2 Marks and 11 MarksHemachandran100% (1)
- Basic Construction ProblemsDocument45 pagesBasic Construction ProblemsAna ArcangelNo ratings yet
- Kinematic Modeling of Hydraulic Excavator’s Backhoe AttachmentDocument8 pagesKinematic Modeling of Hydraulic Excavator’s Backhoe AttachmentSourabh ShastriNo ratings yet
- Planar Kinetics of A Rigid Body: Force & AccelerationDocument41 pagesPlanar Kinetics of A Rigid Body: Force & AccelerationZoker_45No ratings yet
- Rigid Body DynamicsDocument86 pagesRigid Body Dynamicssureshkumarga100% (1)
- A Beginner's Guide To ICP-MS: Part II: The Sample-Introduction SystemDocument12 pagesA Beginner's Guide To ICP-MS: Part II: The Sample-Introduction SystemThiên KimNo ratings yet
- BIOCHEMISTRY CHAPTER 1 INTRODUCTION With CONCEPT MAPDocument4 pagesBIOCHEMISTRY CHAPTER 1 INTRODUCTION With CONCEPT MAPKASHMIR R3No ratings yet
- C9D - 1.0304 - SteelNumber - Chemical Composition, Equivalent, PropertiesDocument2 pagesC9D - 1.0304 - SteelNumber - Chemical Composition, Equivalent, PropertiesSergiNo ratings yet
- Ostra Crude Oil (70 - 30)Document1 pageOstra Crude Oil (70 - 30)coolwet90No ratings yet
- Silfit-Z-91 (HOFFMANN)Document2 pagesSilfit-Z-91 (HOFFMANN)Huyền TrầnNo ratings yet
- Name of The Units Date of Allotment Name of The Products No - of Persons EmployedDocument3 pagesName of The Units Date of Allotment Name of The Products No - of Persons EmployedSathianarayanan Vijayakumar75% (4)
- Electrostatic Potential and Capacitance ExplainedDocument14 pagesElectrostatic Potential and Capacitance Explaineddimdamfly100% (1)
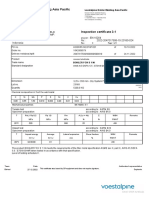
- Inspection Certificate 3.1Document1 pageInspection Certificate 3.1YUDI IRMAWANTONo ratings yet
- Excursions in Statistical Dynamics: Gavin E. CrooksDocument117 pagesExcursions in Statistical Dynamics: Gavin E. CrookspzvpzvNo ratings yet
- Grade 11 Origin of The UniverseDocument19 pagesGrade 11 Origin of The Universeknipxin85% (27)
- Mapefer 1K - 453-7-2019Document4 pagesMapefer 1K - 453-7-2019NUR HADIRAH AFIQAH BINTI ABDUL RAZAK 16653No ratings yet
- Metallurgical Engineering Scheme of Teaching and ExamDocument12 pagesMetallurgical Engineering Scheme of Teaching and ExamSuraj KumarNo ratings yet
- Reshuffl Test 1Document12 pagesReshuffl Test 1PiyushNo ratings yet
- Brochure XL - ArkemaDocument19 pagesBrochure XL - ArkemaCori_009No ratings yet
- 759-Article Text-1948-1-10-20150627Document6 pages759-Article Text-1948-1-10-20150627hayet debbichNo ratings yet
- CME 200 Introduction To Chemical Engineering: Dr. Hadil Abu KhalifehDocument17 pagesCME 200 Introduction To Chemical Engineering: Dr. Hadil Abu KhalifehNajmul Puda PappadamNo ratings yet
- Alaimo2001 - PurificationDocument1 pageAlaimo2001 - PurificationAnna OlszewskaNo ratings yet
- Determination of Acidity in Whole Raw MilkDocument3 pagesDetermination of Acidity in Whole Raw Milkpruebas123123No ratings yet
- Oligodynamic Effect - Wikipedia PDFDocument29 pagesOligodynamic Effect - Wikipedia PDFkuldeep sainiNo ratings yet
- Manufacturing of Acidic, Basic & Neutral RefractoriesDocument9 pagesManufacturing of Acidic, Basic & Neutral RefractoriesRishu DeyNo ratings yet
- A Study On Anasysis and Fabrication of An Ice Plant ModelDocument13 pagesA Study On Anasysis and Fabrication of An Ice Plant ModelLeyzer MalumayNo ratings yet
- Effect of Water Content and Tween 80 To The Stability of Emulsified BiodieselDocument7 pagesEffect of Water Content and Tween 80 To The Stability of Emulsified BiodieselTaurusVõNo ratings yet
- To Determine Vapor Pressure of Gasoline Sample Using Reid Method Astm D323 ObjectiveDocument3 pagesTo Determine Vapor Pressure of Gasoline Sample Using Reid Method Astm D323 ObjectiveFAH MANNo ratings yet
- Coal Drying Calculation: NTPC Drg. No.Document4 pagesCoal Drying Calculation: NTPC Drg. No.anil peralaNo ratings yet
- CHEM1901 Model MCQ PDFDocument13 pagesCHEM1901 Model MCQ PDFMavia NaushadNo ratings yet
- How Can We Prevent Urea CrystalsDocument1 pageHow Can We Prevent Urea CrystalsMostafa FawzyNo ratings yet
- 0052 0054 PDFDocument3 pages0052 0054 PDFAndrés ChicaizaNo ratings yet
- The Science of AstrobiologyDocument361 pagesThe Science of AstrobiologyAline Gonçalves100% (1)
- Here are the names for the covalent compounds:CO - carbon monoxide CO2 - carbon dioxideDocument67 pagesHere are the names for the covalent compounds:CO - carbon monoxide CO2 - carbon dioxideCacey Daiwey CalixtoNo ratings yet
- Alcohols, Phenols and Ethers - MCQs Test - 2Document3 pagesAlcohols, Phenols and Ethers - MCQs Test - 2Prasant KumarNo ratings yet