You might also like
- 4.01 08 2022 - FeatureDescriptorsDocument46 pages4.01 08 2022 - FeatureDescriptorsSarnithaNo ratings yet
- Computer Vision ch5Document55 pagesComputer Vision ch5ssNo ratings yet
- Harris InterestPoints Andfeatures 1Document64 pagesHarris InterestPoints Andfeatures 1Ankush JainNo ratings yet
- 03 FeaturesDocument84 pages03 FeaturesAnonimo Um WNo ratings yet
- Lecture 12Document68 pagesLecture 12Sourabh Sisodia SrßNo ratings yet
- EECE 5639 Computer Vision I: Descriptors, Feature Matching, Hough TransformDocument68 pagesEECE 5639 Computer Vision I: Descriptors, Feature Matching, Hough TransformSourabh Sisodia SrßNo ratings yet
- Lecture 4 1 Feature DescriptorsDocument30 pagesLecture 4 1 Feature DescriptorsEliNo ratings yet
- EdgeDetection 0.1haDocument57 pagesEdgeDetection 0.1haDương Lê HồngNo ratings yet
- Lec05 Invariance For WebDocument34 pagesLec05 Invariance For WebArijit BoseNo ratings yet
- LocalFeatures ImageMatching 0.1haDocument64 pagesLocalFeatures ImageMatching 0.1haDương Lê HồngNo ratings yet
- Interest Points: Computer Vision Jia-Bin Huang, Virginia TechDocument104 pagesInterest Points: Computer Vision Jia-Bin Huang, Virginia TechDUDEKULA VIDYASAGARNo ratings yet
- VP07 1 CaliperGeometryDocument21 pagesVP07 1 CaliperGeometryinigofetNo ratings yet
- ME4707 Robótica: Herramientas de Visión Computacional IIDocument48 pagesME4707 Robótica: Herramientas de Visión Computacional IICarolina Garcia GuerreroNo ratings yet
- Image Segmentation, Representation and DescriptionDocument40 pagesImage Segmentation, Representation and DescriptionButta Rajasekhar100% (1)
- Distinctive Image Features From Scale-Invariant KeypointsDocument26 pagesDistinctive Image Features From Scale-Invariant Keypointstitu1993No ratings yet
- SIFT - The Scale Invariant Feature TransformDocument62 pagesSIFT - The Scale Invariant Feature TransformtantanNo ratings yet
- Unit II - Chapter 4 - Feature DetectionDocument56 pagesUnit II - Chapter 4 - Feature Detection2033009mdcsNo ratings yet
- Digital Image ProcessingDocument88 pagesDigital Image ProcessinghorlandovragasNo ratings yet
- gdc2018 Seed Shiny Pixels and Beyond Real Time Raytracing at SeedDocument56 pagesgdc2018 Seed Shiny Pixels and Beyond Real Time Raytracing at SeedLeonard GrafNo ratings yet
- SIFT WhiteDocument55 pagesSIFT WhiteTrung Nguyen QuangNo ratings yet
- Distinctive Image Feature From Scale-Invariant Keypoints: David G. Lowe, 2004Document27 pagesDistinctive Image Feature From Scale-Invariant Keypoints: David G. Lowe, 2004Wei LiuNo ratings yet
- NARF 3D Range Image Features For Object RecognitioDocument3 pagesNARF 3D Range Image Features For Object RecognitioIvan VidovićNo ratings yet
- Lect 7Document59 pagesLect 7Duong TheNo ratings yet
- Data Driven Markov Chain Monte CarloDocument40 pagesData Driven Markov Chain Monte CarlojorgeNo ratings yet
- Feature Detection and MatchingDocument50 pagesFeature Detection and Matchingarya dadhich100% (1)
- SIFT - The Scale Invariant Feature TransformDocument62 pagesSIFT - The Scale Invariant Feature TransformIsmael CoulibalyNo ratings yet
- SIFT - The Scale Invariant Feature TransformDocument62 pagesSIFT - The Scale Invariant Feature TransformIsmael CoulibalyNo ratings yet
- Feature Detection: Jayanta Mukhopadhyay Dept. of Computer Science and EnggDocument54 pagesFeature Detection: Jayanta Mukhopadhyay Dept. of Computer Science and EnggsutanuberaNo ratings yet
- Scale Invariant Feature Transform by David Lowe Short Explanation of The Approach by Michela LeccaDocument22 pagesScale Invariant Feature Transform by David Lowe Short Explanation of The Approach by Michela Leccatrantinh1010No ratings yet
- Feature Matching: "What Stuff in The Left Image Matches With Stuff On The Right?"Document62 pagesFeature Matching: "What Stuff in The Left Image Matches With Stuff On The Right?"Lim Yoong KangNo ratings yet
- Acknowledgement: Sift:Scale Invariant Feature TransformDocument25 pagesAcknowledgement: Sift:Scale Invariant Feature TransformSawan Singh MaharaNo ratings yet
- Vlsi Physical DesignDocument26 pagesVlsi Physical Designilias ahmed100% (1)
- Shape Features: Jamil AhmadDocument28 pagesShape Features: Jamil AhmadhandojoeNo ratings yet
- CSE 185 Introduction To Computer Vision: Feature MatchingDocument48 pagesCSE 185 Introduction To Computer Vision: Feature MatchingDUDEKULA VIDYASAGARNo ratings yet
- Numeric Modelling With The Wolf Pass Project: For Leapfrog Geo Version 5.1Document80 pagesNumeric Modelling With The Wolf Pass Project: For Leapfrog Geo Version 5.1Bayartsengel TseNo ratings yet
- Lec 3 SIFTDocument28 pagesLec 3 SIFTahmed sayedNo ratings yet
- Chapter2 SegmentationDocument37 pagesChapter2 SegmentationasmaaNo ratings yet
- (p7) The Jpeg2000 Still Image Coding SystemDocument33 pages(p7) The Jpeg2000 Still Image Coding Systemmhl167No ratings yet
- 3 Fundamentals For Computer Vision & Deep LearningDocument56 pages3 Fundamentals For Computer Vision & Deep LearningmadhuNo ratings yet
- Cad Unit 2Document73 pagesCad Unit 2Aindrila GangulyNo ratings yet
- Offline Signature Verification Using Local Keypoint FeaturesDocument19 pagesOffline Signature Verification Using Local Keypoint FeaturesrahulNo ratings yet
- Ug Consultants Digital Image Processing Course ContentsDocument9 pagesUg Consultants Digital Image Processing Course ContentsMadhusudhana RaoNo ratings yet
- Lecture 4 0 From Keypoints To CorrespondencesDocument20 pagesLecture 4 0 From Keypoints To CorrespondencesEliNo ratings yet
- 14 MapReduce PDFDocument82 pages14 MapReduce PDFMatheus Silva100% (1)
- 14 MapReduceDocument82 pages14 MapReducegegopi100% (1)
- Materi 08 VK 2122 2Document70 pagesMateri 08 VK 2122 2IlhamzNo ratings yet
- GDC2003 OGL ARBVertexProgram PDFDocument58 pagesGDC2003 OGL ARBVertexProgram PDFBalqis YafisNo ratings yet
- 6 Vision Lec 4Document36 pages6 Vision Lec 4Kareem SamirNo ratings yet
- Illumination Scale RotationDocument16 pagesIllumination Scale RotationGra ProNo ratings yet
- Image Edge Detection Based On Fpga: Sree Vidyanikethan Engineering CollegeDocument38 pagesImage Edge Detection Based On Fpga: Sree Vidyanikethan Engineering CollegeRamesh MkNo ratings yet
- 3 Fundamentals For Computer Vision & Deep LearningDocument56 pages3 Fundamentals For Computer Vision & Deep LearningRajachandra VoodigaNo ratings yet
- 04 Raster AnalysisDocument57 pages04 Raster AnalysisMinh MacNo ratings yet
- Feature Matching and RANSAC: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005Document36 pagesFeature Matching and RANSAC: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005shaguftahumaNo ratings yet
- ME Summer 2017Document2 pagesME Summer 2017Hema lathaNo ratings yet
- Assignment 4Document2 pagesAssignment 4abrasNo ratings yet
- BriskDocument31 pagesBriskcaleksa123100% (1)
- Two-Dimensional Wavelets: ECE 802 Spring 2010Document61 pagesTwo-Dimensional Wavelets: ECE 802 Spring 2010Anand KarthikNo ratings yet
- Slide - 02 - NISP - 19 - Learning To Predict 3D Objects With An Interpolation-Based Differentiable RendererDocument18 pagesSlide - 02 - NISP - 19 - Learning To Predict 3D Objects With An Interpolation-Based Differentiable RendererHui-Ting LinNo ratings yet
- Image SegmentationDocument82 pagesImage SegmentationShakshi AgrawalNo ratings yet
- From Pixels to Animation: An Introduction to Graphics ProgrammingFrom EverandFrom Pixels to Animation: An Introduction to Graphics ProgrammingRating: 1 out of 5 stars1/5 (1)
- Medical Visual Question Answering: A Survey: Lin, Zhang, Tao, Shi, Haffari, Wu, He and GeDocument18 pagesMedical Visual Question Answering: A Survey: Lin, Zhang, Tao, Shi, Haffari, Wu, He and GemanojaNo ratings yet
- Chapter 3Document20 pagesChapter 3manojaNo ratings yet
- A Classification Supervised Auto-Encoder Based On Predefined Evenly-Distributed Class CentroidsDocument16 pagesA Classification Supervised Auto-Encoder Based On Predefined Evenly-Distributed Class CentroidsmanojaNo ratings yet
- Lecture 8Document126 pagesLecture 8manojaNo ratings yet
- QP Setting - Help FileDocument6 pagesQP Setting - Help FilemanojaNo ratings yet
- Features 0328Document85 pagesFeatures 0328manojaNo ratings yet
- Hidden Neurons PDFDocument12 pagesHidden Neurons PDFmanojaNo ratings yet
- A32 Keypoint DetectorsDocument34 pagesA32 Keypoint DetectorsmanojaNo ratings yet
- 14 Surf 2Document39 pages14 Surf 2manojaNo ratings yet
- Part 1: The Star Schema Data Model: Healthcare Data Models UC Davis Continuing and Professional EducationDocument5 pagesPart 1: The Star Schema Data Model: Healthcare Data Models UC Davis Continuing and Professional EducationmanojaNo ratings yet
- Proof Cover SheetDocument16 pagesProof Cover SheetmanojaNo ratings yet
- Computer Standards & InterfacesDocument8 pagesComputer Standards & InterfacesmanojaNo ratings yet
- Dan Jurafsky and James Martin Speech and Language ProcessingDocument46 pagesDan Jurafsky and James Martin Speech and Language ProcessingmanojaNo ratings yet
- N-Grams and Smoothing: CSC 371: Spring 2012Document39 pagesN-Grams and Smoothing: CSC 371: Spring 2012manojaNo ratings yet
- Delta SigmaDocument12 pagesDelta Sigmaelad-lachmi-4064No ratings yet
- USGS PhotoScan Workflow PDFDocument1 pageUSGS PhotoScan Workflow PDFDigta FernandoNo ratings yet
- Latest Research Papers On Digital Signal ProcessingDocument8 pagesLatest Research Papers On Digital Signal ProcessingixevojrifNo ratings yet
- Aiwa nsx-sz200 PDFDocument44 pagesAiwa nsx-sz200 PDFKaverinVeniaminNo ratings yet
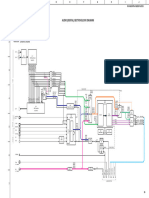
- Service Manual: CDC-X2250 CDC-X2270Document53 pagesService Manual: CDC-X2250 CDC-X2270pata saladaNo ratings yet
- Adaptive Filter With LMSDocument39 pagesAdaptive Filter With LMSSaidur Rahman SidNo ratings yet
- Feedback Destroyer Pro 1124pDocument25 pagesFeedback Destroyer Pro 1124pJoe ValdezNo ratings yet
- CE Previous Question PaperDocument15 pagesCE Previous Question Papercrce.9517.ecsNo ratings yet
- +2.7 V To +5.5 V, 200 KSPS 8-Bit Sampling ADC: S Conversion Time 10%Document11 pages+2.7 V To +5.5 V, 200 KSPS 8-Bit Sampling ADC: S Conversion Time 10%222No ratings yet
- Yamaha rxv663Document15 pagesYamaha rxv663romain mathieuNo ratings yet
- Ask The Applications Engineer-28: by Eamon Nash Logarithmic Amplifiers ExplainedDocument5 pagesAsk The Applications Engineer-28: by Eamon Nash Logarithmic Amplifiers ExplainedAudio TecnologiaNo ratings yet
- BMS CatalogDocument90 pagesBMS CatalogAnonymous Wyb8Y1No ratings yet
- MB 60 - Dynamic Microphone Set: Caution!Document1 pageMB 60 - Dynamic Microphone Set: Caution!Diego Guardeño MuñozNo ratings yet
- A Review of Convolutional Neural Network-Based Computer Aided Lung Nodule Detection SystemDocument18 pagesA Review of Convolutional Neural Network-Based Computer Aided Lung Nodule Detection SystemIAES IJAINo ratings yet
- Henry Olonga - Roiher Mic122Document2 pagesHenry Olonga - Roiher Mic122Sebastian RehbeinNo ratings yet
- MLX90316 Datasheet Melexis PDFDocument48 pagesMLX90316 Datasheet Melexis PDFHussain Amir AliNo ratings yet
- Dolby 365 ManualDocument37 pagesDolby 365 ManualDirk Lindemans0% (1)
- Ad7606b 1623783Document73 pagesAd7606b 1623783Jeferson AlvesNo ratings yet
- Mackie 1402-VLZ PRO Service ManualDocument12 pagesMackie 1402-VLZ PRO Service Manualqline lineNo ratings yet
- Building An Effective, High Performances, Single 18", Front Loaded SubwooferDocument12 pagesBuilding An Effective, High Performances, Single 18", Front Loaded SubwooferRenato Pereira da SilvaNo ratings yet
- Introduction: PID Controller Design: SystemDocument14 pagesIntroduction: PID Controller Design: SystemRantharu AttanayakeNo ratings yet
- Bts - For - Katana PG 19-27 Effect Parameter List GuideDocument9 pagesBts - For - Katana PG 19-27 Effect Parameter List GuideRaphael IntoEntropy RecordingsNo ratings yet
- EE 370, Lecture 07Document5 pagesEE 370, Lecture 07Peshal NayakNo ratings yet
- Datasheet HEX-E H QC v1.3 ENDocument6 pagesDatasheet HEX-E H QC v1.3 ENJoel GallegosNo ratings yet
- Sampling and ReconstructionDocument6 pagesSampling and ReconstructionRooshNo ratings yet
- Signals and Systems (ELE-202) RCS (EngineeringDuniya - Com)Document2 pagesSignals and Systems (ELE-202) RCS (EngineeringDuniya - Com)Sudhakar JoshiNo ratings yet
- Kam Uhf Bodypack ManualDocument2 pagesKam Uhf Bodypack ManualPaul100% (1)
- Glossary: - Device That Converts An Information Signal Into A Form Suitable For Propagation Along A ChannelDocument4 pagesGlossary: - Device That Converts An Information Signal Into A Form Suitable For Propagation Along A ChannelReivenNo ratings yet
- Eee 321 Assignment 1 232Document2 pagesEee 321 Assignment 1 232Nafees HasanNo ratings yet
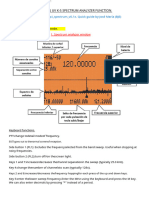
- QuanSheng UV K5 Spectrum Analyzer Guide ENDocument3 pagesQuanSheng UV K5 Spectrum Analyzer Guide EN2w0yvyNo ratings yet