Professional Documents
Culture Documents
Modulo Ever SW1A4080
Uploaded by
mario basurtoOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Modulo Ever SW1A4080
Uploaded by
mario basurtoCopyright:
Available Formats
EVER Elettronica
Via del Commercio 2/4, Loc. San Grato Z.I.
26900 – LODI – ITALY
Phone: ++39(0)371412318 Fax: ++39(0)371412367 The clever drive
e-mail : infoever@everelettronica.it
URL : www.everelettronica.it
SW1A4080-Controller bipolar drive for 2 phase step motor :
• AC Power Supply: 34 ÷ 100Vac;
• AC Logic Supply: 17 ÷ 100Vac;
• Phase current : up to 8 ARMS (11,0 APK);
• Chopper frequency : ultrasonic 33KHz;
• Step angle: from full step up to 1/128;
• Protections: over-current, over-temperature, short circuit phase-phase motor and phase-ground;
• digital inputs (opto-coupled);
• digital outputs (opto-coupled);
• Size and mass: 165(mm)x97,5x62,3mm without connectors (L x D x H : refer to picture); weight : 900 gr ;
• IP protection: IP20;
• Working temperature 5°C ÷ 40°C ; Storage temperature -25°C ÷ 55°C ;
• Humidity : 5% ÷ 85% not condensing;
2 1
JMP700
9 CN2 1 CN3 4 1
2 1
JMP700
9 CN2 1 CN3 4 1
1 CN16 9 1 CN12 11
26900 LODI - ITALY Full Digital Microstep Driver
1
CN5B 8
PB
RoHS
COMPLIANT
FREE OK
DANGER !
2002/95/EC
26900 LODI - ITALY Full Digital Microstep Driver
CN13
1
CN5B 8
PB Power supply (nominal range) : 34 ~ 100 Vac
RoHS FREE OK
DANGER ! Logic supply (nominal range): 34 ~ 100 Vac
COMPLIANT Hazardous Voltages
2002/95/EC
CN5A 8
I phase ............................... : 8.0 Arms Max (11.28 Apk Max) and Hot Surfaces Inside
1
P ower supply (nominal range): 34 ~ 100 Vac Inputs ............................... : 5Vdc or 24Vdc / 16mA each (see manual) To remove the Cover
Output ............................... : 24 Vdc / 100 mA (not protected) refer to
Logic supply (nominal range): 34 ~ 100 Vac Hazardous V oltages USER'S MANUA L
12
Analog Inputs .................... : ± 10Vdc or Potentiometer
CN5A 8
I phase ............................... : 8.0 Arms Max (11.28 Apk Max) and Hot Surfaces Inside
1
To remove the Cover Thermal Protection ............ : +75 °C
Inputs ............................... : 5Vdc or 24Vdc / 16mA each (see manual)
refer to Operating Temperature ..... : 0 ~ +50 °C
Output ............................... : 24 Vdc / 100 mA (not protected)
Analog Inputs .................... : ± 10V dc or Potentiometer
USER'S MANUAL Humidity Range ................. : 10% ~ 90% not condensing
CN11 1
1
Thermal Protection ............ : +75 °C JMP600 JMP700
Operating T em perature ..... : 0 ~ +50 °C Position Analog Input Type Position Termination Resistor
Humidity Range ................. : 10% ~ 90% not condensing 4 IN_AN1 Potentiometer Mode 2 Open RX Termination Resistor Not Inserted
4
CN11 1
3 3 IN_AN1 Differential ±10V Mode 2 Closed RX Term ination Resistor Inserted
CN4
2
JMP600 JMP700
Position Analog Input Type Position Termination Resistor 2 2 IN_AN0 Potentiometer Mode 1 Open TX Termination Resistor Not Inserted
4 IN_AN1 Potentiometer Mode 2 Open RX Termination Resistor Not Inserted 1 1 IN_AN0 Differential ±10V Mode 2 1 1 Closed TX Term ination Resistor Inserted
4
3 IN_AN1 Differential ±10V Mode 2 Closed RX Termination Resistor Inserted
1
3
CN4
2
2 2 IN_AN0 Potentiometer Mode 1 Open TX Termination Resistor Not Inserted CN1 CN2 CN3 CN4 CN5A/B
1 1 IN_AN0 Differential ±10V Mode 1 Closed TX Termination Resistor Inserted
CN10
2 1 STEP MOTOR DIGITAL INPUTS D IGITA L OUTPUTS ANALOG INPUTS RS232/RS485
1
1
1 A 1 +B0_IN0 1 +24Vdc 1 V_POT 1 +RX (RS485)
CN1 CN2 CN3 CN4 CN5A/B
2 A/ 2 -B0_IN0 2 VSS 2 AGND 2 -RX (RS485)
STATUS
CN10
STEP MOTOR DIGITAL INPUTS DIGITAL OUTPUTS ANALOG INPUTS RS232/RS485
3 B 3 +B0_IN1 3 BO_OUT0 3 n.c. 3 RXD (RS232)
1
1 A 1 +B0_IN0 1 +24Vdc 1 V_POT 1 +RX (RS485) 4 B/ 4 -B0_IN1 4 B0_OUT1 4 +IN_AN0 4 DTR (RS232)
4
2 A/ 2 -B0_IN0 2 VSS 2 AGND 2 -RX (RS485) 5 +B0_IN2 5 -IN_AN0 5 GND
STATUS
3 B 3 +B0_IN1 3 BO_OUT0 3 n.c. 3 RXD (RS232) 6 -B0_IN2 6 +IN_AN1 6 TXD (RS232)
4 B/ 4 -B0_IN1 4 B0_OUT1 4 +IN_AN0 4 DTR (RS232) 7 +B0_IN3 7 -IN_AN1 7 +TX (RS485)
4
5 +B0_IN2 5 -IN_AN0 5 GND 8 -B0_IN3 8 -TX (RS485)
6 -B0_IN2 6 +IN_AN1 6 TXD (RS232)
4
9 B0_COM_IN
7 +B0_IN3 7 -IN_AN1 7 +TX (RS485)
8 -B0_IN3 8 -TX (RS485)
CN1
4
9 B0_COM _IN
CN10 CN11 CN12 CN13 CN16
PWR AC IN UPS AC IN D IGITA L INPUTS DIGITAL OUTPUTS DIGITAL INPUTS
CN1
CN10 CN11 1 AC IN 1 AC LOG 1 B1_IN0 1 B1_OUT0 1 +B0_IN4
PWR AC IN UPS AC IN 2 AC IN 2 AC LOG 2 B1_IN1 2 B1_OUT1 2 -B0_IN4
1
1 AC IN 1 AC LOG 3 PE 3 B1_IN2 3 B1_OUT2 3 +B0_IN5
2 AC IN 2 AC LOG 4 AC IN 4 B1_IN3 4 B1_OUT3 4 -B0_IN5
1
3 PE 5 B1_IN4 5 B1_OUT4 5 +B0_IN6
4 AC IN 6 B1_IN5 6 B1_OUT5 6 -B0_IN6
7 B1_IN6 7 B1_OUT6 7 +B0_IN7
8 B1_IN7 8 B1_OUT7 8 -B0_IN7
9 B1_COM_IN 9 +24Vdc 9 B0_COM_IN
10 B1_COM_IN 10 +24Vdc
11 B1_COM_IN 11 VSS
12 VSS
LO DI - ITALY
LODI - ITALY
FUSE FUSE
T 10A T 10A
DIP2 DIP1 DIP2 DIP1
SW1
SW2
SW3
SW4
SW1
SW2
SW7
SW8
Refer to User's Manual for
SW3
SW4
SW5
SW6
Refer to User's Manual for
SW1
SW2
SW3
SW4
SW1
SW2
SW3
SW4
SW5
SW6
SW7
SW8
Dip-Switches Settings detail Dip-Switches Settings detail
OFF ON OFF ON
Refer to installation use and maintenance manual for more information.
i
Available user manual at link http://www.everelettronica.it/manhw.html link.
short SW1A4080_GB.odt Release 0.3 Page 1 - 8
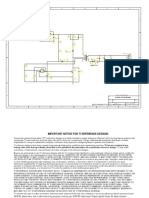
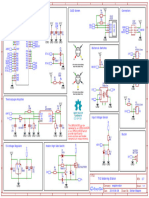
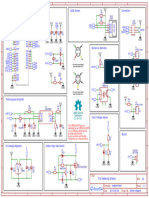
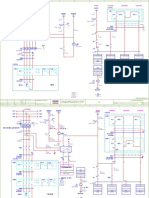
System connectors and jumpers
Connectors: position and function.
CN12 CN16
CN16 CN2
CN2
CN12 Digital
Digital
DigitalInputs
Inputs
Digital
DigitalInputs
Inputs DigitalInputs
Inputs
Std Hi-Freq
Hi-Freq Hi-Freq
Hi-Freq
Std CN2.1
CN12.1
CN12.1==B1_IN0
B1_IN0
CN16.1
CN16.1==+B0_IN4
+B0_IN4 CN2.1==+B0_IN0
+B0_IN0
CN16.2 CN2.2
CN2.2==-B0_IN0
CN12.2
CN12.2==B1_IN1
B1_IN1 CN16.2==-B0_IN4
-B0_IN4 -B0_IN0
CN12.3 CN16.3 = +B0_IN5 CN2.3 = +B0_IN1 CN3
CN12.3==B1_IN2
B1_IN2 CN16.3 = +B0_IN5 CN2.3 = +B0_IN1
CN2.4 CN3
CN12.4 = B1_IN3 CN16.4
CN16.4==-B0_IN5 CN2.4==-B0_IN1
-B0_IN1 Digital
DigitalOutputs
CN12.4 = B1_IN3 -B0_IN5
CN12.5 = B1_IN4 CN16.5
CN16.5==+B0_IN6
+B0_IN6 CN2.5
CN2.5==+B0_IN2
+B0_IN2 Outputs
CN12.5 = B1_IN4 CN16.6 = -B0_IN6 CN2.6 = -B0_IN2 Hi-Freq
Hi-Freq
CN12.6
CN12.6==B1_IN5
B1_IN5 CN16.6 = -B0_IN6 CN2.6 = -B0_IN2
CN2.7 CN3.1
CN3.1==+24
CN12.7
CN12.7==B1_IN6
B1_IN6
CN16.7
CN16.7==+B0_IN7
+B0_IN7 CN2.7==+B0_IN3
+B0_IN3 CN3.2
+24
CN12.8 = B1_IN7 CN16.8
CN16.8==-B0_IN7
-B0_IN7
CN2.8
CN2.8==-B0_IN3
-B0_IN3 CN3.2==VSS
VSS
CN12.8 = B1_IN7 CN16.9 CN2.9 = B0_COM_IN CN3.3 = B0_OUT0
CN12.9
CN12.9==B1_COM_IN
B1_COM_IN CN16.9==B0_COM_IN
B0_COM_IN CN2.9 = B0_COM_IN CN3.3 = B0_OUT0
CN3.4
CN12.10 CN3.4==B0_OUT1
B0_OUT1
CN12.10==B1_COM_IN
B1_COM_IN
CN12.11
CN12.11==B1_COM_IN
B1_COM_IN
JMP700
JMP700Jumpers
Jumpers
1 1
CN5B
CN13
CN13 CANbus Version RS232/485 Version
Digital 1
DigitalOutputs
CN5B.1 = CAN_H CN5B.1 = +RX (RS485)
Outputs CN5B.2 = CAN_L CN5B.2 = -RX (RS485)
Std
Std CN5B.3 = CAN_GND CN5B.3 = RXD (RS232)
CN12.1
CN12.1==B1_OUT0
B1_OUT0 CN5B.4 = CN5B.4 = DTR (RS232)
2
CN12.2
CN12.2==B1_OUT1
B1_OUT1 1 1 CN5B.5 = CN5B.5 = 0V_A
CN12.3
CN12.3==B1_OUT2
B1_OUT2 CN5B.6 = CN5B.6 = TXD (RS232)
CN12.4 = B1_OUT3
CN12.4 = B1_OUT3 CN5B.7 = CAN_GND_O CN5B.7 = +TX (RS485)
CN12.5
CN12.5==B1_OUT4
B1_OUT4 CN5B.8 = CN5B.8 = -TX (RS485)
CN12.6
CN12.6==B1_OUT5
B1_OUT5 1
CN12.7 = B1_OUT6
CN12.7 = B1_OUT6 CN5A
CN12.8 = B1_OUT7
CN12.8 = B1_OUT7 CANbus Version RS232/485 Version
CN12.9
CN12.9==+24V
+24V
1 CN5A.1 = CAN_H CN5A.1 = +RX (RS485)
CN12.10
CN12.10==+24V
+24V CN5A.2 = CAN_L CN5A.2 = -RX (RS485)
CN12.11 = VSS
CN12.11 = VSS CN5A.3 = CAN_GND CN5A.3 =
CN12.12 CN5A.4 = CN5A.4 =
CN12.12==VSS
VSS CN5A.5 = CN5A.5 = 0V_A
1 CN5A.6 = CN5A.6 =
CN5A.7 = CAN_GND_O CN5A.7 = +TX (RS485)
1 CN5A.8 = CN5A.8 = -TX (RS485)
CN11
CN11
Logic
Logic ACin
ACin CN4
CN10.1 CN4
CN10.1==AClog
AClog Analog
CN10.2
CN10.2==AClog
AClog
1 AnalogInputs
Inputs
CN4.1
CN4.1==V_POT
V_POT
CN4.2
CN4.2==AGND
1 CN4.3
AGND
CN4.3== Modbus or Canbus
CN10
CN10 CN4.4 = +IN_AN0
CN4.4 = +IN_AN0
Power CN4.5
CN4.5==-IN_AN0
Power ACin
ACin CN4.6
-IN_AN0
CN10.1
CN10.1==ACin
ACin CN4.6==+IN_AN1
+IN_AN1
CN10.2 CN4.7
CN4.7==-IN_AN1
CN10.2==ACin
ACin -IN_AN1
CN10.3
CN10.3==PE
PE
CN10.4
CN10.4==ACin
ACin
Status
StatusDisplay
Display
1 CN1
CN1
Step
StepMotor
Motor
CN1.1
CN1.1==AA
CN1.2
CN1.2==A/A/
CN1.3
CN1.3==BB
CN1.4
CN1.4==B/B/
Jumpers: position and function.
Attention: the jumper JMP600 must not be closed in position 1 and 2 or in position 3 and 4 at the same time.
Attention: the jumper JMP700 with a RS485 Half-Duplex connection, insert only 1 jumper indifferently in
position 1 or 2.
JMP600
JMP600
Jumpers
Jumpersposition
position
11==IN_AN_0
IN_AN_0
differential
differential±10V
±10V
22==IN_AN_0
IN_AN_0
Potentiometer
Potentiometer
33==IN_AN_1
IN_AN_1
differential
differential±10V
±10V
44==IN_AN_1
IN_AN_1
Potentiometer
Potentiometer
JMP700
JMP700
Jumpers
Jumpers
1 2 3 4 5 6 7
1 2 3 4
short SW1A4080_GB.odt Release 0.3 Page 2 - 8
CN1 : Step Motor CN5A=CN5B : CanBus version
4 position, pitch 5.08mm., PCB header connector RJ45 , 8 position, PCB shielded header connector
Pos Name Characteristics Pos Name Characteristics
1 A PWR Output Phase A motor 1 CAN_H Digital I/O Bus Line Dominant HIGH
2 A/ PWR Output Phase A/ motor 2 CAN_L Digital I/O Bus Line Dominant LOW
3 B PWR Output Phase B motor 3 CAN_GND PWR Output Signal Ground
4 n.c. Not connected
4 B/ PWR Output Phase B/ motor
5 n.c. Not connected
6 n.c. Not connected
CN2 : Hi-Freq Digital Inputs
7 CAN_GND_O PWR Output Optional Signal Ground
9 position, pitch 2.5mm., PCB header connector 8 n.c. Not connected
Pos Name Characteristics
1 +B0_IN0 Digital Input Positive terminal digital input B0_IN0 CN10 : AC Input - Power
2 -B0_IN0 Digital Input Negative terminal digital input B0_IN0 4 position, pitch 5mm, PCB header connector
3 +B0_IN1 Digital Input Positive terminal digital input B0_IN1 Pos Name Characteristics
1 ACIN PWR Input AC input power supply Motor.
4 -B0_IN1 Digital Input Negative terminal digital input B0_IN1
2 ACIN PWR Input AC input power supply Motor
5 +B0_IN2 Digital Input Positive terminal digital input B0_IN2
3 PE EARTH Input Environmental Protective Earthing
6 -B0_IN2 Digital Input Negative terminal digital input B0_IN2
4 ACIN PWR Input AC power supply input Motor
7 +B0_IN3 Digital Input Positive terminal digital input B0_IN3
8 -B0_IN3 Digital Input Negative terminal digital input B0_IN3 CN11 : AC Input - Logic
9 B0_COM_I PWR Input Reference common inputs (for use at 2 position, pitch 5mm, PCB header connector
N 24VDC) Pos Name Characteristics
1 ACLOG PWR Input AC power supply input Logics
CN3 : Hi-Freq Digital Outputs 2 ACLOG PWR Input AC power supply input Logics.
4 position, pitch 2.5mm., PCB header connector CN12 : Std Digital Inputs
Pos Name Characteristics 11 position, pitch 2.5mm., PCB header connector
1 +24V PWR Input Positive power supply digital outputs. Pos Name Characteristics
2 VSS PWR Input Negative reference power supply digital 1 B1_IN0 Digital Input Terminal digital input B1_IN0
outputs.
2 B1_IN1 Digital Input Terminal digital input B1_IN1
3 B0_OUT0 Digital Output Open Emitter Output (Source Current) 3 B1_IN2 Digital Input Terminal digital input B1_IN2
B0_OUT0
4 B1_IN3 Digital Input Terminal digital input B1_IN3
4 B0_OUT1 Digital Output Open Emitter Output (Source Current)
5 B1_IN4 Digital Input Terminal digital input B1_IN4
B0_OUT1
6 B1_IN5 Digital Input Terminal digital input B1_IN5
7 B1_IN6 Digital Input Terminal digital input B1_IN6
CN4 : Analog Inputs
8 B1_IN7 Digital Input Terminal digital input B1_IN7
7 position, pitch 3.81mm., PCB header connector 9 B1_COM_IN PWR Input Reference common inputs B1_INn
Pos Name Characteristics 10 B1_COM_IN PWR Input Reference common inputs B1_INn
1 V_POT PWR Output Positive power supply output for 11 B1_COM_IN PWR Input Reference common inputs B1_INn
potentiometers.
2 AGND PWR Output Negative reference output for CN13 : Std Digital Outputs
potentiometers. 12 position, pitch 2.5mm., PCB header connector
3 n.c. Not connected Pos Name Characteristics
4 +IN_AN0 Analog Input Positive terminal analog input IN_AN_0 1 B1_OUT0 Digital Output Terminal digital outputs B1_OUT0
5 -IN_AN0 Analog Input Negative terminal analog input 2 B1_OUT1 Digital Output Terminal digital outputs B1_OUT1
IN_AN_0 3 B1_OUT2 Digital Output Terminal digital outputs B1_OUT2
6 +IN_AN1 Analog Input Positive terminal analog input IN_AN_1 4 B1_OUT3 Digital Output Terminal digital outputs B1_OUT3
7 -IN_AN1 Analog Input Negative terminal analog input 5 B1_OUT4 Digital Output Terminal digital outputs B1_OUT4
IN_AN_1 6 B1_OUT5 Digital Output Terminal digital outputs B1_OUT5
7 B1_OUT6 Digital Output Terminal digital outputs B1_OUT6
CN5A - CN5B : RS232/RS485 version 8 B1_OUT7 Digital Output Terminal digital outputs B1_OUT7
9 +24V PWR Input Positive power supply digital outputs
RJ45 , 8 position, PCB shielded header connector
10 +24V PWR Input Positive power supply digital outputs
Pos CN5A CN5B
11 VSS PWR Input Negative reference power supply
(IN) (OUT)
RS485 RS485 Characteristics 12 VSS PWR Input Negative reference power supply
+
CN16 : Hi-Freq Digital Inputs
RS232
9 position, pitch 2.5mm., PCB header connector
1 +RX +RX Digital Input Non-inverting input RS485 receiver
Pos Name Characteristics
2 -RX -RX Digital Input Inverting input RS485 receiver
1 +B0_IN4 Digital Input Positive terminal digital input B0_IN4
3 n.c. RXD Digital Input Input RS232 receiver
2 -B0_IN4 Digital Input Negative terminal digital input B0_IN4
4 n.c. DTR Digital Output Data Transmit Ready RS232
3 +B0_IN5 Digital Input Positive terminal digital input B0_IN5
Output
4 -B0_IN5 Digital Input Negative terminal digital input B0_IN5
5 0V_A 0V_A PWR Reference (mass) communication
5 +B0_IN6 Digital Input Positive terminal digital input B0_IN6
Output interface
6 -B0_IN6 Digital Input Negative terminal digital input B0_IN6
6 n.c. TXD Digital Output RS232 transmitter
7 +B0_IN7 Digital Input Positive terminal digital input B0_IN7
Output
8 -B0_IN7 Digital Input Negative terminal digital input B0_IN7
7 +TX +TX Digital Non-inverting output RS485
Output transmitter 9 B0_COM_IN PWR Input Reference common inputs (for use at 24VDC)
8 -TX -TX Digital Inverting output RS485 transmitter
Output
short SW1A4080_GB.odt Release 0.3 Page 3 - 8
CN16 : Hi-Freq Digital Inputs JMP600: analog inputs setting
9 position, pitch 2.5mm., PCB header connector 4 position, pitch 2.54mm., PCB header
Pos Name Characteristics Pos Analog Input Characteristics Factory
1 +B0_IN4 Digital Input Positive terminal digital input B0_IN4 Setting
2 -B0_IN4 Digital Input Negative terminal digital input B0_IN4 1 IN_AN_0 Differential Jumper inserted
±10V
3 +B0_IN5 Digital Input Positive terminal digital input B0_IN5
2 Potentiometer Jumper inserted ■
4 -B0_IN5 Digital Input Negative terminal digital input B0_IN5
5 +B0_IN6 Digital Input Positive terminal digital input B0_IN6 3 IN_AN_1 Differential Jumper inserted
6 -B0_IN6 Digital Input Negative terminal digital input B0_IN6 ±10V
7 +B0_IN7 Digital Input Positive terminal digital input B0_IN7 4 Potentiometer Jumper inserted ■
8 -B0_IN8 Digital Input Negative terminal digital input B0_IN7
9 B0_COM_IN PWR Input Reference common inputs (for use at 24V DC)
JMP700: insertion of termination resistorson communication interfaces
2 position, pitch 2.54mm., PCB header
Pos Factory Setting RS232/485 versions CanBus versions
Jumper NOT 120Ω resistance on transmission Not connected
1 inserter line RS485 not inserted
■ Jumper 120Ω resistance on transmission Not connected
inserter line RS485 inserted
Jumper NOT 120Ω resistance on transmission 120Ω resistance on
inserter line RS485 not inserted CanBus non inserted
2
■ Jumper 120Ω resistance on transmission 120Ω resistance on
inserter line RS485 inserted CanBus inserted
Operational statuses and their signals
Dip-switch allocation Missing Operating System: no software
“ ”
DIP2 DIP1 application stored on drive
U1 U0 ID6 ID5 ID4 ID3 ID2 ID1 ID0 BD2 BD1 BD0 Firmware update: Updating of new
1 4 1 8 “ ”
software in progress.
Initialization: the drive executes the
Drive's Baud Rate selection “ “
start-up procedure (a few seconds after
BD2 BD1 BD0 Modbus CANOpen the start-up procedure has begun).
OFF OFF OFF 115200 1M
OFF OFF ON 57600 500 K Correct functioning
“ “
OFF ON OFF 38400 250 K
OFF ON ON 19200 125 K Voltage of the DC bus near the maximal
“ ”+“ ”
ON OFF OFF 9600 100 K value
ON OFF ON 4800 50 K Drive temperature is near to the
ON ON OFF 2400 50 K “ ”+“ ”
maximum value
ON ON ON 1200 50 K
Warning: EEprom near Write Overrun
“ ”+” “
Drive's ID number selection Warning: EEprom near End of Life
ID6 ID5 ID4 ID3 ID2 ID1 ID0 Node Id # “ ”+” “
OFF OFF OFF OFF OFF OFF OFF Not allowed Enable OFF, current zero
“ ” flashing
OFF OFF OFF OFF OFF OFF ON 1
OFF OFF OFF OFF OFF ON OFF 2 Error: expired eePLC software trial
“ ”+“ ”
OFF OFF OFF OFF OFF ON ON 3
OFF OFF OFF OFF ON OFF OFF 4 Security intervention of watchdog;
“ ”+“ ”
OFF OFF OFF OFF ON OFF ON 5
OFF OFF OFF OFF ON ON OFF 6 Internal Software Error;
“ ”+“ ”
OFF OFF OFF OFF ON ON ON 7
OFF OFF OFF ON OFF OFF OFF 8 Missing calibration values;
“ ”+“ ”
OFF OFF OFF ON OFF OFF ON 9
OFF OFF OFF ON OFF ON OFF 10 Management EEPROM;
“ ”+“ ”
OFF OFF OFF ON OFF ON ON 11
OFF OFF OFF ON ON OFF OFF 12 Error: eePLC application error
“ ”+“ ”
OFF OFF OFF ON ON OFF ON 13
OFF OFF OFF ON ON ON OFF 14 Error: EEprom Write Overrun
“ ”+” “
OFF OFF OFF ON ON ON ON 15
OFF OFF ON OFF OFF OFF OFF 16 Error: Feature Unavailable
“ ”+” “
OFF OFF ON OFF OFF OFF ON 17
OFF OFF ON OFF OFF ON OFF 18 Open motor phases
“ ”+“ “
OFF OFF ON OFF OFF ON ON 19
OFF OFF ON OFF ON OFF OFF 20 over/under voltage (1);
“ ”+“ ”
OFF OFF ON OFF ON OFF ON 21
over current on the motor output;
OFF OFF ON OFF ON ON OFF 22 “ ”+“ ”
OFF OFF ON OFF ON ON ON 23
over temperature of the drive;
OFF OFF ON ON OFF OFF OFF 24 “ ”+“ ”
XX XX XX XX XX XX XX ….
ON ON ON ON ON ON ON 127
short SW1A4080_GB.odt Release 0.3 Page 4 - 8
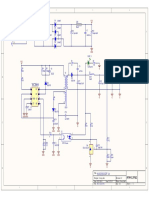
High-Freq Digital input connection: High-Freq Digital inputs.
External Control Logic SW1____
+24V
+INn 220R
1 6
3K3 5
PNP +24V Connection -INn
(no external components 1N4448 3 4
N.C.
needed)
COM_IN
1N4448 1K2 1W
INn=Digital Input Interface (Example)
External Control Logic SW1____
+24V
+INn 220R
1 6
3K3 5
-INn 1N4448 3 4
N.C.
Push-Pull +24V
COM_IN
Connection
(no external 1N4448 1K2 1W
components needed) INn=Digital Input Interface (Example)
External Control Logic SW1____
+24V
+INn 220R
1 6
NPN +24V Connection 3K3 5
(need an external Resistor) -INn
Rext 1N4448 3 4
1K2 1W
COM_IN
N.C.
1N4448 1K2 1W
INn=Digital Input Interface (Example)
External Control Logic SW1____
INn=Digital Input Interface (Example)
PNP +5V Connection
+INn 220R
9 8
1 6
74HC14 3K3 5
-INn 1N4448 3 4
COM_IN
N.C.
1N4448 1K2 1W
External Control Logic SW1____
INn=Digital Input Interface (Example)
+5
+INn 220R
1 6
NPN +5V Connection 3K3 5
9 8
-INn 1N4448 3 4
74HC14 COM_IN
N.C.
1N4448 1K2 1W
External Control Logic SW1____
Line Driver +5V INn=Digital Input Interface (Example)
Connection
A +5 +INn 220R
2 1 6
1Y
1
1A 3K3 5
1Z
3 -INn 1N4448 3 4
AM26LS31 COM_IN
N.C.
1N4448 1K2 1W
short SW1A4080_GB.odt Release 0.3 Page 5 - 8
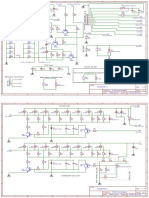
Std Digital inputs connection: Std Digital inputs 24Vdc
VCC (5÷24Vdc) SW1____
CN12.1 B 1_ IN 0 3K3
4K7
4V7 1N
VSS VSS
CN12.2 B 1_ IN 1 3K3
4K7
CN12.n 4V7 1N
VSS VSS
CN12.8 B 1_ IN 8 3K3
4K7
external +
power V
Vcc 4V7 1N
5÷24Vdc CN12.9
- VSS VSS
supply CN12.10 B 1_ C OM _ IN
CN12.11
VSS
STD OUTPUT CONNECTOR
CN13.11
V SS
CN13.12
PNP-Push-Pull Connection Example
VSS SW1____
CN12.1 B 1_ IN 0 3K3
4K7
4V7 1N
VSS VSS
CN12.2 B 1_ IN 1 3K3
4K7
CN12.n 4V7 1N
VSS VSS
CN12.8 B 1_ IN 8 3K3
4K7
external - Vcc 4V7 1N
power V 5÷24Vdc CN12.9
supply + VSS VSS
CN12.10 B 1_ C OM _ IN
CN12.11
VCC (5÷24Vdc)
STD OUTPUT CONNECTOR
CN13.11
V SS
CN13.12
NPN Connection Example
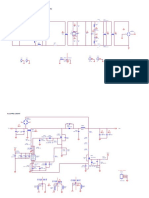
High-Freq Digital output connection : Digital outputs VOUTmax=24Vdc, IOUTmax=100mA
SW1____
+24V
CN3.1 +24V
3K3
prote c tion B CW 68 6 1
External Control Logic Fuse 3K 3 5
CN3.3 O UT0 680p
4 3
+24V PNP digital Input
1u 3V3
P ullD own
(Optional) CN3.2 V SS 1N4004 6K 8
3K3
B CW 68 6 1
External Control Logic 3K 3 5
CN3.4 O UT1 680p
4 3
+24V PNP digital Input
1u 3V3
P ullD own
(O ptional) 1N4004 6K 8
Std Digital output connection : Digital outputs VOUTmax=24Vdc, IOUTmax=100mA
SW1____
CN13.12 V SS Fully protec ted
O cta l Drive r
V SS CN13.11 V SS
GND
V SS
CN13.10 +24V
+24V CN13.9 FUSE + 24V
+24V V cc
CN13.8 T4A
B1_ O UT7 O UT7
CN13.7 B1_ O UT6 O UT6
CN13.6 B1_ O UT5
+24V LOAD O UT5
CN13.5 B1_ O UT4 O UT4
V SS CN13.4 B1_ O UT3 O UT3
CN13.3 B1_ O UT2 O UT2
External Control Logic CN13.2 B1_ O UT1 O UT1
CN13.1 B1_ O UT0
+24V PNP digital Input O UT0
P ullD own 10N 10N 10N 10N 10N 10N 10N 10N
(Optional)
VSS VSS VSS V SS V SS V SS VSS VSS
V SS 10nF capacitors for EMC immunity
short SW1A4080_GB.odt Release 0.3 Page 6 - 8
Analog input connection : Analog input +/-10Vdc CEI EN 61131-2 type, not isolated.
-IN_ A N0
- 6
IN_ A N_ 0
V 5
7
+ +IN_ A N0 :2
J UM P ER C LO SED O N P O SIT IO N :
A G ND 1 = IN _A N _0 in ±10V c onfiguration
A G ND 2 = IN _A N _0 for e xte rna l pote ntiome te r
3 =IN _A N _1 in ±10V c onfiguration
8
:1
3 V REF2
4 = IN _A N _1 for e xte rna l pote ntiome te r
N .C. V _P O T 1
JMP600
2
1 N OT E :
2
- ne ve r c lose jumpe rs on position 1& 2 or
A GN D 3& 4 at the sa me time.
4
3
A G ND V CC
4
A G ND
-IN_ A N1
4
:1
- 2
IN_ A N_ 1
V 3
1
+ +IN_ A N1
8
A G ND
V CC
A G ND
Analog input connection : Analog input for potentiometer connection.
N .C. -IN_ A N0
V _P O T 6
7 IN_ A N _0
5
5K +IN_ A N0 :2
A GN D JUM P ER C LO SED O N P O SITION :
A G ND 1 = IN _A N _ 0 in ±10V c onfigura tion
A G ND 2 = IN _A N _ 0 for exte rnal pote ntiome ter
3 =IN _A N _ 1 in ±10V c onfigura tion
8
:1
3 V REF2
4 = IN _A N _ 1 for exte rnal pote ntiome ter
V _P O T 1
JMP600
2
1 N OTE :
2
- ne ve r close jumpers on position 1&2 or
3& 4 at the sa me time .
4
A GN D 3
A G ND V CC
4
AG ND
-IN_ A N1
4
N .C. :1
V _P O T 2
1 IN_ A N _1
3
5K +IN_ A N1
8
A GN D A G ND
V CC
A G ND
Analog output connection : Analog output 0-10Vdc optically isolated.
VEE
VCC
External Device
2
A VSS
:1
A VSS
CN17.1 O UT _ AN 0 3 1
2
0÷10V +IN 3
ANALOG INPUT
CN17.2 A VSS
8
-IN
1
AVSS AVSS A VSS A VSS VCC
VCC
External Device
2
:2
A VSS
CN17.3 O UT _ AN 1 3 7
6
0÷10V +IN 5
ANALOG INPUT
CN17.4 A VSS
-IN
1
AVSS AVSS A VSS
short SW1A4080_GB.odt Release 0.3 Page 7 - 8
Mating cable kit
CN1 4 position, pitch 5.08mm., plug connector PHOENIX CONTACT p# MSTB 2,5/4-ST-5,08 order cod.1757035
CN2/CN16 9 position, pitch 2.5mm., plug connector PHOENIX CONTACT p# FK MC0,5/9-ST-2,5 order cod.1881396
CN3 4 position, pitch 2.5mm., plug connector PHOENIX CONTACT p# FK MC0,5/4-ST-2,5 order cod.1881341
CN4 7 position, pitch 3.81mm., plug connector PHOENIX CONTACT p# MC1,5/7-ST-3,81 order cod.1803620
CN5A/B RJ45 ,8 position, plug connector MOLEX p# FCC 68 compliants and equivalents order cod.44915-0011
CN10 4 position, pitch 5mm., plug connector WAGO - Cage Clamp series order cod. 721-104/026-045
CN11 2 position, pitch 5mm., plug connector WAGO - Cage Clamp series order cod. 721-102/026-047
CN12 11 position, pitch 2.5mm., plug connector PHOENIX CONTACT p# FK MC0,5/11-ST-2,5 order cod.1881419
CN13 12 position, pitch 2.5mm., plug connector PHOENIX CONTACT p# FK MC0,5/12-ST-2,5 order cod.1881422
Section of the cables
Power supply Min 0.5mm2 (AWG20) Communication Min 0.25mm2 (AWG23)
Max 2.5mm2 (AWG12) interface CANbus CIA-CANOpen
Analog input Min 0.14mm2 (AWG25)
Motor output Min 0.5mm2 (AWG20) Digital input Min 0.14mm2 (AWG25)
Max 2.5mm2 (AWG12) Digital output Max 0.5mm2 (AWG20)
Verify the installation
– Check all connection : power supply and inputs/outputs.
– Make sure all settings right for the application.
– Make sure the power supply is suitable for the drive.
– If possible, remove the load from the motor shaft to avoid that wrong movements cause damage.
– Enable the current to the motor and verify the applied torque.
– Enable a movement of some steps and verify if the rotation direction is the desired one.
– Disconnect the power supply, connect the load on the motor and check the full functionality.
Check the detected fail function
When one of the following situations occur, the drive doesn't function correctly and it is reported an
error.
DEFECT CAUSE ACTION
The external fuse to the drive burns May be due to a wrong connection Adjust the connection and recover
of the power supply. the fuse. Use a fuse suitable
for the application.
Over temperature protection. May be due to a duty cycle Increase the air flux and if it is
possible chose a motor with higher
torque at same current value.
Over current protection. May be due to a short circuit on the Shut down the power supply and
motor power stage. check if the motor is demaged
Noisy motor movement with May be caused due to a state of Increase the resolution of the step
vibrations. resonance. angle and/or change the motor
velocity to avoid resonance area
The motor produce torque but May be caused due to a wrong Check the connection of the I/O's
doesn't rotate connection of the I/O's.
short SW1A4080_GB.odt Release 0.3 Page 8 - 8
You might also like
- 715g2907 PsuDocument4 pages715g2907 PsukalanghoNo ratings yet
- Power Supply Led Driver 715G5792P02004002H AOCDocument5 pagesPower Supply Led Driver 715G5792P02004002H AOCEgar EduardoNo ratings yet
- Power Supply Led Driver 715G5792P02004002H AOCDocument5 pagesPower Supply Led Driver 715G5792P02004002H AOCPaulo chagas paulo ratoNo ratings yet
- SW1 R1 1K: Graph of XSC1 12Document1 pageSW1 R1 1K: Graph of XSC1 12Jorge Antonio GuillenNo ratings yet
- Arbaminchi HosiptalDocument15 pagesArbaminchi HosiptalminteNo ratings yet
- 5.1 Channel Hi-Fi Amplifier Technical MrigankaDocument3 pages5.1 Channel Hi-Fi Amplifier Technical Mrigankametinprivat01No ratings yet
- 715G6161 P01 W21 0020+psu PDFDocument4 pages715G6161 P01 W21 0020+psu PDFPedro AfonsoNo ratings yet
- Zasilanie ISP Buzzer L298N: SwitcheDocument1 pageZasilanie ISP Buzzer L298N: SwitcheSCNo ratings yet
- Schematics-478020 RouterDocument5 pagesSchematics-478020 RouterALFONZO DANIELNo ratings yet
- Friendly PIC Lab-III SchematicDocument7 pagesFriendly PIC Lab-III SchematicYasir NaseerNo ratings yet
- Kv-29fq76e, 29FQ76KDocument24 pagesKv-29fq76e, 29FQ76KBouhaja SalahNo ratings yet
- Viewsonic 715g4269p01001001m Power SupplyDocument4 pagesViewsonic 715g4269p01001001m Power SupplyKukla LossNo ratings yet
- Input Balance With GainDocument2 pagesInput Balance With Gainchanomi613No ratings yet
- Schematic - Baxandall 3 Tone EQ Preamp - 2021-07-28Document1 pageSchematic - Baxandall 3 Tone EQ Preamp - 2021-07-28Luan AntonyNo ratings yet
- Power: Circuit Diagrams and PWB LayoutsDocument4 pagesPower: Circuit Diagrams and PWB LayoutsAmin SantanaNo ratings yet
- Smps Slurap9Document2 pagesSmps Slurap9jay lowkeyNo ratings yet
- BẢN VẼ SƠ ĐỒ NGUYÊN LÝDocument1 pageBẢN VẼ SƠ ĐỒ NGUYÊN LÝminhquangcmga13No ratings yet
- STUDIMAXDocument3 pagesSTUDIMAXsurtaoNo ratings yet
- Oem 715g2907 SCHDocument1 pageOem 715g2907 SCHDj-Samuel OliveiraNo ratings yet
- Beko Z1J194 PsuDocument1 pageBeko Z1J194 PsuСтепан РостNo ratings yet
- Irt/C Irt/C Irt/C Irt/C Infrared Infrared Infrared Infrared Temperature Sensor Temperature Sensor Temperature Sensor Temperature SensorDocument7 pagesIrt/C Irt/C Irt/C Irt/C Infrared Infrared Infrared Infrared Temperature Sensor Temperature Sensor Temperature Sensor Temperature Sensorluat1983No ratings yet
- ATMEGA64M1 - CanBoard V1Document1 pageATMEGA64M1 - CanBoard V1Fabian Alfonso100% (1)
- Schematic - LM358 AKÜ ŞARJ DEVRESİ - 2021-10-18Document1 pageSchematic - LM358 AKÜ ŞARJ DEVRESİ - 2021-10-18Med SamiNo ratings yet
- Orion Plus 2400-3000aDocument1 pageOrion Plus 2400-3000aArmandinho CaveroNo ratings yet
- D6 D7 D8 D9 D10: Led-Green Led-Red Led-Yellow Led-Blue Led-GreenDocument1 pageD6 D7 D8 D9 D10: Led-Green Led-Red Led-Yellow Led-Blue Led-GreenFebri usmantoNo ratings yet
- Infet Dcin VDD: Technology Technology TechnologyDocument1 pageInfet Dcin VDD: Technology Technology TechnologyAlexander VargasNo ratings yet
- ScheDocument1 pageScheHelderDosSantosNo ratings yet
- SolderingStation2 Schematic v2.7Document1 pageSolderingStation2 Schematic v2.7bela.gondaNo ratings yet
- NEW TDA8950J (Com Pré-Amplificador) DiagramaDocument1 pageNEW TDA8950J (Com Pré-Amplificador) DiagramaDaniel Aguilar100% (2)
- SolderingStation2 Schematic v2.6Document1 pageSolderingStation2 Schematic v2.6bela.gondaNo ratings yet
- Atmega328 Based Circuit Diagram of The ProjectDocument1 pageAtmega328 Based Circuit Diagram of The ProjectKav Mav100% (2)
- Appendix 6 TemplateDocument30 pagesAppendix 6 TemplateCakasana AlifNo ratings yet
- 738512Document1 page738512AlexandreNo ratings yet
- 715G6677 P02 001 0020+psuDocument6 pages715G6677 P02 001 0020+psuIvanilto Martins da Cruz100% (2)
- Quiz#08 - 02 - Timer Circuit - To PLCDocument1 pageQuiz#08 - 02 - Timer Circuit - To PLC22146015No ratings yet
- Receptor AM Con Control Regenerativo SCHDocument1 pageReceptor AM Con Control Regenerativo SCHCristo CrossNo ratings yet
- 22PFL3500/T3 715G3897: 715G3897-1A 220 240V 125 180mmDocument1 page22PFL3500/T3 715G3897: 715G3897-1A 220 240V 125 180mmabhijeet varadeNo ratings yet
- Schematic PrintsDocument1 pageSchematic PrintsDân Kỹ Thuật100% (1)
- Schematic - Eco Fuel 1.1.0 - 2022-04-26Document1 pageSchematic - Eco Fuel 1.1.0 - 2022-04-26Moni Que0% (1)
- Double Muff (EC2010)Document1 pageDouble Muff (EC2010)mark fakundinyNo ratings yet
- Index: Circuit Diagram Working Principle Description Comparision With Other Application Disadvantages ReferenceDocument26 pagesIndex: Circuit Diagram Working Principle Description Comparision With Other Application Disadvantages Referenceinfinite2towersNo ratings yet
- 715g2907 PsuDocument4 pages715g2907 PsuIvanilto M da cruzNo ratings yet
- Pijp201 Pijp202 Pijp203 Pijp204: Pisp102Document1 pagePijp201 Pijp202 Pijp203 Pijp204: Pisp102luigigerula100% (1)
- Ecualizador PeaveyDocument5 pagesEcualizador PeaveyJavier Ventura ValenciaNo ratings yet
- MC2100 Rev Engrd PDFDocument1 pageMC2100 Rev Engrd PDFMaria VochinNo ratings yet
- JVC lt-42z10 LCD TV All Version SCH Ya786Document39 pagesJVC lt-42z10 LCD TV All Version SCH Ya786Matias SchiaviNo ratings yet
- 2 Inputs Mic With Echo - SCHDocument1 page2 Inputs Mic With Echo - SCHMuhammad YousafNo ratings yet
- Philips 715g8672-p02-000-002h Psu SCH PDFDocument4 pagesPhilips 715g8672-p02-000-002h Psu SCH PDFZoltán Stier50% (2)
- Ecs Dd200-12xno - Rev 1.5Document2 pagesEcs Dd200-12xno - Rev 1.5sergio chagasNo ratings yet
- Universitaet Wuppertal, Fb-Esheetmatr - Nr.Namescalesizerevcad-Technikencade (Prof - Dr.-Ing Moelle)Document1 pageUniversitaet Wuppertal, Fb-Esheetmatr - Nr.Namescalesizerevcad-Technikencade (Prof - Dr.-Ing Moelle)abdo Zinneddine100% (1)
- PR11 Schematic V2Document1 pagePR11 Schematic V2siti syahirah100% (1)
- Battery + LM7805 1N4007: VI 1 VO 3 1 2Document1 pageBattery + LM7805 1N4007: VI 1 VO 3 1 2Erroz RosadiNo ratings yet
- File Merged By: Alu Tiit: (Acr) 576pinoy - Tech / 2 Inputs Mic With Echo / Dec. 8, 2018Document5 pagesFile Merged By: Alu Tiit: (Acr) 576pinoy - Tech / 2 Inputs Mic With Echo / Dec. 8, 2018rea sonerNo ratings yet
- 2 Inputs Mic With Echo SCHDocument5 pages2 Inputs Mic With Echo SCHrea soner100% (1)
- PFC Control BoardDocument1 pagePFC Control BoardClaudinei FigueiraNo ratings yet
- GP1 V1.0Document1 pageGP1 V1.0pauloroberto_tecNo ratings yet
- 308 Eurorack Distortion Module SchematicDocument1 page308 Eurorack Distortion Module Schematicdreadlock holidayNo ratings yet
- Adjustment: 1. FirmwareDocument15 pagesAdjustment: 1. Firmwarerocklando777No ratings yet
- Transmission Line IDocument58 pagesTransmission Line IOdellien SajaNo ratings yet
- Differential Amplifier - The Voltage SubtractorDocument4 pagesDifferential Amplifier - The Voltage Subtractorsudheer52No ratings yet
- Epson EH-TW9300 3D Full HD Gaming / Home Theatre 3LCD Projector With 4K-Enhancement TechnologyDocument3 pagesEpson EH-TW9300 3D Full HD Gaming / Home Theatre 3LCD Projector With 4K-Enhancement TechnologyWebAntics.com Online Shopping StoreNo ratings yet
- DicaDocument23 pagesDicaVikas100% (1)
- Ebu 101 LFDocument2 pagesEbu 101 LFlepohard4539No ratings yet
- Lecture 6 Optical ModulatorsDocument26 pagesLecture 6 Optical ModulatorsSyed Muhammad DanishNo ratings yet
- Lecture25 130418Document28 pagesLecture25 130418Peter BalikNo ratings yet
- XS1010 1212INSTfinalDocument6 pagesXS1010 1212INSTfinalTitus-Adelin IonNo ratings yet
- Manual Sundaya-Apple - 15 PDFDocument1 pageManual Sundaya-Apple - 15 PDFEduSizaNo ratings yet
- Fabrication Mod 2Document16 pagesFabrication Mod 2albin shajanNo ratings yet
- Improving Bandwidth Rectangular Patch Antenna Using Different Thickness of Dielectric SubstrateDocument6 pagesImproving Bandwidth Rectangular Patch Antenna Using Different Thickness of Dielectric SubstrateMohd Zubair KhanNo ratings yet
- FMG3015-R20A: Gigabit Active Fiber Bridge With CATVDocument4 pagesFMG3015-R20A: Gigabit Active Fiber Bridge With CATVppancxooNo ratings yet
- Cpu OrganizationDocument5 pagesCpu OrganizationNavis Nayagam100% (2)
- Sebury K3-3Document1 pageSebury K3-3Alexandru BurbuleaNo ratings yet
- DH7 OsDocument2 pagesDH7 OsSampalau AnglerNo ratings yet
- Textile Based Capacitive SensorDocument12 pagesTextile Based Capacitive SensorKrishna PrakashNo ratings yet
- HCF 4082Document7 pagesHCF 4082parayasa50No ratings yet
- Product Data Sheet M Series Intrinsically Safe I o Deltav en 56244Document9 pagesProduct Data Sheet M Series Intrinsically Safe I o Deltav en 56244faisal84inNo ratings yet
- Design Guide LLC Resonant Tank Design 3 3kw Ev Board Charger Obc 20170505Document7 pagesDesign Guide LLC Resonant Tank Design 3 3kw Ev Board Charger Obc 20170505Danut StanciuNo ratings yet
- ECTE333 Lecture 07 PDFDocument16 pagesECTE333 Lecture 07 PDFJatinNo ratings yet
- Manual FW230 PDFDocument16 pagesManual FW230 PDFaze20100% (1)
- 4-Analog InputDocument21 pages4-Analog InputTam PhamNo ratings yet
- AWD-25-1300-Datasheet UVHF Antenna ExpertDocument1 pageAWD-25-1300-Datasheet UVHF Antenna Expertson nguyenNo ratings yet
- SSMT Solution ManualDocument12 pagesSSMT Solution ManualPraahas Amin0% (1)
- 2.a What Is A Digital System? Why Are Digital Systems So Pervasive? AnswerDocument23 pages2.a What Is A Digital System? Why Are Digital Systems So Pervasive? AnswerSpiritual developmentNo ratings yet
- My NTE Cross Reference Chart PDFDocument19 pagesMy NTE Cross Reference Chart PDFbrynsteinNo ratings yet
- EUMA Installation GuidelineDocument7 pagesEUMA Installation GuidelineNenad PuzovicNo ratings yet
- DSPDocument116 pagesDSPAjay YANo ratings yet