You might also like
- Fully Autonomous Vehicles: Visions of the future or still reality?From EverandFully Autonomous Vehicles: Visions of the future or still reality?No ratings yet
- Virtual Assistants and Self-Driving CarsDocument5 pagesVirtual Assistants and Self-Driving CarsTama KusumaNo ratings yet
- Self-Driving Car Ecosystem As A Complex System: January 2021Document6 pagesSelf-Driving Car Ecosystem As A Complex System: January 2021tusila16No ratings yet
- 3 Workshop On User Experience of Autonomous Driving: Alexander Meschtscherjakov Manfred Tscheligi Dalila SzostakDocument3 pages3 Workshop On User Experience of Autonomous Driving: Alexander Meschtscherjakov Manfred Tscheligi Dalila SzostakDionisie LefterNo ratings yet
- E-Scooters On The GroundDocument14 pagesE-Scooters On The GroundOvidiu HarpaleteNo ratings yet
- The Role Potential and Future of HMIDocument6 pagesThe Role Potential and Future of HMIIQPC GmbHNo ratings yet
- Automating Our Railways 1604844942Document12 pagesAutomating Our Railways 1604844942Ankush Kumar BisenNo ratings yet
- 2017 Driverless CarDocument8 pages2017 Driverless CarLucky pavanNo ratings yet
- Impacts of Autonomous Cars From A Traffic Engineering PerspectiveDocument8 pagesImpacts of Autonomous Cars From A Traffic Engineering PerspectiveFestNo ratings yet
- A Review of Driving Simulation Technology and ApplicationsDocument16 pagesA Review of Driving Simulation Technology and ApplicationsHamilton MoreiraNo ratings yet
- Analiza de RiscuriDocument8 pagesAnaliza de RiscuriBugheanu Mihai MihaiNo ratings yet
- The Development of A Self-Driving BusDocument10 pagesThe Development of A Self-Driving BusInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Autonomous Vehicles: Leanne Dominique E. Lopena Giselle R. RanchezDocument22 pagesAutonomous Vehicles: Leanne Dominique E. Lopena Giselle R. RanchezDominique LopenaNo ratings yet
- The Two-User Seating Buck: Enabling Face-to-Face Discussions of Novel Car Interface ConceptsDocument8 pagesThe Two-User Seating Buck: Enabling Face-to-Face Discussions of Novel Car Interface ConceptsRabadiya AkashNo ratings yet
- Bagus Hussain2018Document41 pagesBagus Hussain2018Tri SuakaNo ratings yet
- Icinco 2015 120Document9 pagesIcinco 2015 120AkshayNo ratings yet
- Traffic Simulator Unreal Engine 4/unity Project DescriptionDocument23 pagesTraffic Simulator Unreal Engine 4/unity Project Descriptionapi-340783236No ratings yet
- The Impacts of Self-Driving Cars On Society: A Review: Submitted By: Raihan Rahman ID: 1830006Document10 pagesThe Impacts of Self-Driving Cars On Society: A Review: Submitted By: Raihan Rahman ID: 1830006Raihan RahmanNo ratings yet
- Future of Mobility Whats NextDocument28 pagesFuture of Mobility Whats NextBoran KöskenliNo ratings yet
- Autonomous Driving: Moonshot Project With Quantum Leap From Hardware To Software & AI FocusDocument56 pagesAutonomous Driving: Moonshot Project With Quantum Leap From Hardware To Software & AI FocusSatyam Agrawal100% (1)
- Chapter 1Document6 pagesChapter 1MelanieNo ratings yet
- Array: Abhishek Gupta, Alagan Anpalagan, Ling Guan, Ahmed Shaharyar KhwajaDocument20 pagesArray: Abhishek Gupta, Alagan Anpalagan, Ling Guan, Ahmed Shaharyar KhwajaZahid iqbalNo ratings yet
- Artificial Intelligent Systems For Vehicle Classification A SurveyDocument20 pagesArtificial Intelligent Systems For Vehicle Classification A Surveybhasker sharmaNo ratings yet
- Robotics Computer VisionDocument10 pagesRobotics Computer VisionViswanath KesavNo ratings yet
- Chehri 2019Document8 pagesChehri 2019AbsolMafizNo ratings yet
- Autonomous Driving: Moonshot Project With Quantum Leap From Hardware To Software & AI FocusDocument56 pagesAutonomous Driving: Moonshot Project With Quantum Leap From Hardware To Software & AI FocusSatyam AgrawalNo ratings yet
- Iqbal Surahman - AI Implementation in Railway IndustryDocument7 pagesIqbal Surahman - AI Implementation in Railway Industryfiasco23No ratings yet
- Singh 2021 IOP Conf. Ser. - Mater. Sci. Eng. 1022 012028Document11 pagesSingh 2021 IOP Conf. Ser. - Mater. Sci. Eng. 1022 012028Sheikh SaadNo ratings yet
- The Impacts of Self-Driving Cars On Society: Submitted By: Raihan Rahman ID: 1830006Document10 pagesThe Impacts of Self-Driving Cars On Society: Submitted By: Raihan Rahman ID: 1830006Raihan RahmanNo ratings yet
- Tits 2020 2980855Document15 pagesTits 2020 2980855rahul rNo ratings yet
- Pelliccione 2017Document18 pagesPelliccione 2017Abdo ElmessiouiNo ratings yet
- Highly Automated Vehicles and Self-Driving Cars (Industry Tutorial)Document8 pagesHighly Automated Vehicles and Self-Driving Cars (Industry Tutorial)Vasu ThakurNo ratings yet
- Proceedings of The Third International Conference On Electronics and Software Science (ICESS2017), Takamatsu, Japan, 2017Document178 pagesProceedings of The Third International Conference On Electronics and Software Science (ICESS2017), Takamatsu, Japan, 2017SDIWC PublicationsNo ratings yet
- Highly Automated Vehicles and Self-Driving Cars: Industry TutorialDocument7 pagesHighly Automated Vehicles and Self-Driving Cars: Industry TutorialJulius Fusic SNo ratings yet
- Robotics and Computer Vision in Swarm Intelligence and Traffic SafetyDocument10 pagesRobotics and Computer Vision in Swarm Intelligence and Traffic SafetyAnupama AnuNo ratings yet
- Self Driving Vehicles An Overview of Their Influence On Tech SocietyDocument4 pagesSelf Driving Vehicles An Overview of Their Influence On Tech SocietyEditor IJTSRDNo ratings yet
- A Review Paper On Development of E-VehiclesDocument6 pagesA Review Paper On Development of E-VehiclesIJRASETPublicationsNo ratings yet
- PaperfromSensors 21 00492 v2Document26 pagesPaperfromSensors 21 00492 v2Samuel Sackey (10847179)No ratings yet
- Comparing State-of-the-Art and Emerging Augmented Reality Interfaces For Autonomous Vehicle-to-Pedestrian CommunicationDocument12 pagesComparing State-of-the-Art and Emerging Augmented Reality Interfaces For Autonomous Vehicle-to-Pedestrian CommunicationankushNo ratings yet
- Vdovic 2019Document15 pagesVdovic 2019Bhagyashree HSNo ratings yet
- Fast-Tracking Advanced Driver Assistance Systems (ADAS) and Autonomous Vehicles Development With SimulationDocument7 pagesFast-Tracking Advanced Driver Assistance Systems (ADAS) and Autonomous Vehicles Development With SimulationSiddharth ChauhanNo ratings yet
- Autonomous Cars: Past, Present and FutureDocument8 pagesAutonomous Cars: Past, Present and FutureTri SuakaNo ratings yet
- EN Self Driving Car Artificial Intelligence PDFDocument5 pagesEN Self Driving Car Artificial Intelligence PDFIndian e-commerce dealsNo ratings yet
- Concept of Intelligent Mechanical Design For Autonomous Mobile RobotsDocument10 pagesConcept of Intelligent Mechanical Design For Autonomous Mobile RobotsJuan MNo ratings yet
- Autonomous Driving in The ICity-HD Maps As A Key CDocument4 pagesAutonomous Driving in The ICity-HD Maps As A Key CGopesh SinghNo ratings yet
- Human Machine InterfaceDocument46 pagesHuman Machine InterfaceAbhishek Kumar100% (1)
- Case StudyDocument9 pagesCase StudyMaAyur SoOniNo ratings yet
- A Survey of Technical Trends of ADAS and Autonomous DrivingDocument4 pagesA Survey of Technical Trends of ADAS and Autonomous DrivingFang YuanNo ratings yet
- Artificial Intelligence in Autonomous VehiclesDocument6 pagesArtificial Intelligence in Autonomous VehiclesEditor IJTSRDNo ratings yet
- Automotive CybersecurityDocument6 pagesAutomotive CybersecurityVarun AroraNo ratings yet
- Motion Cueing Algorithms: A Review Algorithms, Evaluation and TuningDocument5 pagesMotion Cueing Algorithms: A Review Algorithms, Evaluation and TuningMiguel AguilarNo ratings yet
- Applications of Virtual RealityDocument222 pagesApplications of Virtual RealityJosé Ramírez100% (2)
- Final Report Advanced HudDocument70 pagesFinal Report Advanced Hudapi-646708752No ratings yet
- Drive by Wire To AutonomousDocument21 pagesDrive by Wire To AutonomousFresy NugrohoNo ratings yet
- 16 Robotics Visions Warm Intelligence Traffic SafetyDocument9 pages16 Robotics Visions Warm Intelligence Traffic SafetygeethroseNo ratings yet
- The Mobility Topography Model For Substantializing and Projecting Transportation in CitiesDocument10 pagesThe Mobility Topography Model For Substantializing and Projecting Transportation in CitiesBright AdzoneNo ratings yet
- AIMLQBUnit 6Document22 pagesAIMLQBUnit 6Hitesh KhachaneNo ratings yet
- From Coder To Creator 1 Running Head: From Coder To CreatorDocument36 pagesFrom Coder To Creator 1 Running Head: From Coder To CreatorMihaelaNo ratings yet
- Allen2006 PDFDocument6 pagesAllen2006 PDFMaría del Carmen Méndez CastroNo ratings yet
- The Connected Car: An Empirical Study of Electric Cars As Mobile Digital DevicesDocument12 pagesThe Connected Car: An Empirical Study of Electric Cars As Mobile Digital DevicesOla MikeNo ratings yet
- Autonomous Cars: Past, Present and FutureDocument8 pagesAutonomous Cars: Past, Present and FutureTri SuakaNo ratings yet
- Bagus Hussain2018Document41 pagesBagus Hussain2018Tri SuakaNo ratings yet
- 1 s2.0 S0921889020305091 MainDocument8 pages1 s2.0 S0921889020305091 MainTri SuakaNo ratings yet
- Agriculture 11 00954 v4Document17 pagesAgriculture 11 00954 v4Tri SuakaNo ratings yet
- Educational Perennial IsmDocument9 pagesEducational Perennial IsmJo BernabeNo ratings yet
- Portfolio Section Three - Artifact SevenDocument6 pagesPortfolio Section Three - Artifact Sevenapi-419006824No ratings yet
- Teaching PhilosophyDocument2 pagesTeaching Philosophyapi-486805236No ratings yet
- IntroductionDocument11 pagesIntroductionCalle OtsoNo ratings yet
- Behavioral VerbsDocument3 pagesBehavioral VerbsMaya MalanumNo ratings yet
- Research Paper (Cristoto)Document16 pagesResearch Paper (Cristoto)ariel manualNo ratings yet
- EDM 209 Course Orientation On ADM February 4 2023Document42 pagesEDM 209 Course Orientation On ADM February 4 2023Christine Joy PerionNo ratings yet
- Ujer7 19516253 1Document10 pagesUjer7 19516253 1margie rosalesNo ratings yet
- UXUI Design of Online Learning Platforms and TheirDocument12 pagesUXUI Design of Online Learning Platforms and TheirDerekNo ratings yet
- Addie Model Grade 7Document5 pagesAddie Model Grade 7harly hasel arrazNo ratings yet
- List ReferenceDocument44 pagesList ReferenceSERNOR CHERRYL GATCHALIANNo ratings yet
- What We Know About Gen Z 2020 (Onehope)Document19 pagesWhat We Know About Gen Z 2020 (Onehope)Tommy BarqueroNo ratings yet
- Child Development 259Document2 pagesChild Development 259api-267691338No ratings yet
- Lesson Plan in TLE - ICT Grade 7 - 1st Quarter 2Document2 pagesLesson Plan in TLE - ICT Grade 7 - 1st Quarter 2Đønn Gīø80% (30)
- Mine - Pioneers of Guidance TraditionDocument3 pagesMine - Pioneers of Guidance TraditionarlenemaevenidaNo ratings yet
- PEAC Classroom Observation FormDocument2 pagesPEAC Classroom Observation FormMiles SantosNo ratings yet
- Guide Questions in Oral Presentation of ResearchDocument4 pagesGuide Questions in Oral Presentation of ResearchHera Gab ReodiqueNo ratings yet
- Q1 Grade 8 Music DLL Week 2Document7 pagesQ1 Grade 8 Music DLL Week 2Cesil S. Collamar83% (6)
- PMP Exam Prep GuideDocument35 pagesPMP Exam Prep Guideshaik sameeruddin100% (2)
- Ecornell Catalog 2009Document85 pagesEcornell Catalog 2009eCornell123No ratings yet
- Science 8Document21 pagesScience 8Renato Jr Bernadas Nasilo-anNo ratings yet
- Ted Book of BooksDocument3 pagesTed Book of BooksIveta NikolovaNo ratings yet
- Jurnal Internasional 1Document13 pagesJurnal Internasional 1muhammad choerul umamNo ratings yet
- Academic Practices Procedures ManualDocument229 pagesAcademic Practices Procedures ManualMuhammad AbdullahNo ratings yet
- Top 1Document22 pagesTop 1KreyNo ratings yet
- Prelim Exam - TTL2 WPS OfficeDocument4 pagesPrelim Exam - TTL2 WPS OfficeJohn Anthony PiamonteNo ratings yet
- PPSTDocument37 pagesPPSTmia saraba bazar75% (4)
- DLL Sample Food ProcessingDocument3 pagesDLL Sample Food ProcessingMARY ANN CANILLA88% (24)
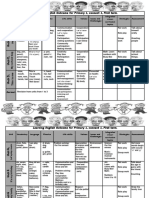
- Learning English Outcome For Primary 1, Connect 1, First TermDocument3 pagesLearning English Outcome For Primary 1, Connect 1, First TermJUST LIFENo ratings yet
- Appeal LetterDocument1 pageAppeal LetterAli Abbas SalimNo ratings yet
- A Welder’s Handbook to Robotic ProgrammingFrom EverandA Welder’s Handbook to Robotic ProgrammingRating: 5 out of 5 stars5/5 (3)
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- Dark Aeon: Transhumanism and the War Against HumanityFrom EverandDark Aeon: Transhumanism and the War Against HumanityRating: 5 out of 5 stars5/5 (1)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!From EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Rating: 4 out of 5 stars4/5 (3)
- Artificial Intelligence: From Medieval Robots to Neural NetworksFrom EverandArtificial Intelligence: From Medieval Robots to Neural NetworksRating: 4 out of 5 stars4/5 (3)
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- Artificial You: AI and the Future of Your MindFrom EverandArtificial You: AI and the Future of Your MindRating: 4 out of 5 stars4/5 (3)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (5)
- Mastering Drones - A Beginner's Guide To Start Making Money With DronesFrom EverandMastering Drones - A Beginner's Guide To Start Making Money With DronesRating: 2.5 out of 5 stars2.5/5 (3)
- Evil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityFrom EverandEvil Robots, Killer Computers, and Other Myths: The Truth About AI and the Future of HumanityRating: 4.5 out of 5 stars4.5/5 (3)
- ChatGPT: The Future of Intelligent ConversationFrom EverandChatGPT: The Future of Intelligent ConversationRating: 3.5 out of 5 stars3.5/5 (8)
- How to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionFrom EverandHow to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionRating: 3.5 out of 5 stars3.5/5 (129)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessFrom EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessNo ratings yet
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceFrom EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceRating: 5 out of 5 stars5/5 (9)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Arduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!From EverandArduino: The ultimate Arduino guide for beginners, including Arduino programming, Arduino cookbook, tips, tricks, and more!Rating: 3 out of 5 stars3/5 (1)
- In the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkFrom EverandIn the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkRating: 5 out of 5 stars5/5 (1)
- Create Profitable Side Hustles with Artificial IntelligenceFrom EverandCreate Profitable Side Hustles with Artificial IntelligenceNo ratings yet
- What to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationFrom EverandWhat to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationRating: 4.5 out of 5 stars4.5/5 (2)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)