You might also like
- ME6601 DTS Nov Dec 2016Document36 pagesME6601 DTS Nov Dec 2016Thamizh Selvan SNo ratings yet
- Examination (30 Items) : Where: F FV Note:HP F F 20w 33000Document5 pagesExamination (30 Items) : Where: F FV Note:HP F F 20w 33000Secret SecretNo ratings yet
- Me6503 Dme Unit 5 Study Notes 2015Document25 pagesMe6503 Dme Unit 5 Study Notes 2015Bala MuruganNo ratings yet
- Belt Drives and Chain DrivesDocument39 pagesBelt Drives and Chain Drivesjaycee68No ratings yet
- Unit-5 Design of Belt DrivesDocument39 pagesUnit-5 Design of Belt DrivesCHANDRASEKARANNo ratings yet
- Flat V-BeltDocument5 pagesFlat V-BeltKongu senthil SyNo ratings yet
- Chapter 3 Example Set 6Document6 pagesChapter 3 Example Set 6alaa altaeeNo ratings yet
- 29.1 Belts, Chain - Sprockets, - Threaded Members SolutionsDocument11 pages29.1 Belts, Chain - Sprockets, - Threaded Members SolutionsMarcelo AmandoronNo ratings yet
- Belt and Chain Drive With Pics and ExampleDocument39 pagesBelt and Chain Drive With Pics and ExampleTheodoric Bravo Martinez100% (1)
- Fabrication, Parameter Evaluation and Testing of A Surface Mounted - Brush-Less DC MotorDocument6 pagesFabrication, Parameter Evaluation and Testing of A Surface Mounted - Brush-Less DC MotorSatyam SwarupNo ratings yet
- 16 M 10 M A A: Solution To Graded Assignment 2 Problem # 1Document5 pages16 M 10 M A A: Solution To Graded Assignment 2 Problem # 1Limuel dale CaldezNo ratings yet
- LeBaPhong Casestudy8Document22 pagesLeBaPhong Casestudy8PHONG LÊ BÁNo ratings yet
- V-Belt DriveDocument9 pagesV-Belt DriveCHANDRASEKARANNo ratings yet
- List of Symbols:: C ExtDocument32 pagesList of Symbols:: C ExtPraveen AdpekarNo ratings yet
- Perhitungan Elektrikal TrashrakeDocument4 pagesPerhitungan Elektrikal Trashrakeclays piezkaal setyabudiNo ratings yet
- 18 SG With Round Rotor DesignDocument45 pages18 SG With Round Rotor DesignAnonymous 2eBal0sNo ratings yet
- Reinforced Concrete Homework Analyzes Beam DesignDocument14 pagesReinforced Concrete Homework Analyzes Beam DesignPiseth HengNo ratings yet
- Chapter 7Document39 pagesChapter 7SayeedIshtiaqueNo ratings yet
- 3 V Belt DriveDocument29 pages3 V Belt DriveMurugesan RameshNo ratings yet
- Lecture Slide On Inductance of Three-Phase LineDocument7 pagesLecture Slide On Inductance of Three-Phase LineSifat -Ul-AlamNo ratings yet
- Machine Design Problems With SolutionsDocument27 pagesMachine Design Problems With SolutionsMarcial Jr. MilitanteNo ratings yet
- V-belt Drives and TransmissionDocument25 pagesV-belt Drives and TransmissionAllen GenerisNo ratings yet
- Spring Design: GD N PC yDocument2 pagesSpring Design: GD N PC yAshokNo ratings yet
- DTS1Document58 pagesDTS1Joe Kamal RajNo ratings yet
- Mechanical Design CalculationsDocument15 pagesMechanical Design CalculationsJomhel Callueng100% (1)
- Chapter 9Document12 pagesChapter 9leojay24No ratings yet
- Question Paper Checklist CT 2Document3 pagesQuestion Paper Checklist CT 2sar_tpgitNo ratings yet
- Bearing DesignDocument5 pagesBearing DesignVenkat RaoNo ratings yet
- EEE8155 Design and Analysis of Electrical Machines and DrivesDocument13 pagesEEE8155 Design and Analysis of Electrical Machines and DrivesstephenNo ratings yet
- Design of connecting rod for petrol engineDocument26 pagesDesign of connecting rod for petrol enginesajal agarwalNo ratings yet
- Pile Group:: Piling Works For Bukit Batok N4C18 To C21 468A Pile Ecentricity Calculation G22Document2 pagesPile Group:: Piling Works For Bukit Batok N4C18 To C21 468A Pile Ecentricity Calculation G22lattmdy100% (3)
- Handbook2 V BeltDocument5 pagesHandbook2 V Beltmehr_yazdanpanahNo ratings yet
- Motor Power CalculationDocument8 pagesMotor Power CalculationKyaw SoeNo ratings yet
- M268749 M268710CD TaperedRollerBearings TDO (TaperedDoubleOuter) ImperialDocument4 pagesM268749 M268710CD TaperedRollerBearings TDO (TaperedDoubleOuter) ImperialMARCOS LAY GARCIA COONo ratings yet
- Mechanical Analysis Belt and Chain Drives: Prof Ahmed KovacevicDocument29 pagesMechanical Analysis Belt and Chain Drives: Prof Ahmed KovacevicTamizh SelvanNo ratings yet
- Design of Main Girder (Compatibility Mode)Document58 pagesDesign of Main Girder (Compatibility Mode)Mohamed Azazy100% (1)
- ShaftsDocument73 pagesShaftsponcatoeraNo ratings yet
- 1) Basic Data: Design of Cantilever Beam As Per IS 456-2000Document4 pages1) Basic Data: Design of Cantilever Beam As Per IS 456-2000khaniskhan03No ratings yet
- SRB DesignDocument3 pagesSRB DesignRam LangheNo ratings yet
- DTS 1.3-1.4 Problems in Design of Flat BeltDocument39 pagesDTS 1.3-1.4 Problems in Design of Flat Beltr nilakandanNo ratings yet
- Mep - Quiz No. 6 - A: Machine DesignDocument4 pagesMep - Quiz No. 6 - A: Machine DesignEnriv YasiladNo ratings yet
- Belting Jan 2019Document21 pagesBelting Jan 2019Abhishek KrNo ratings yet
- Drive Design KPOC X-2210 & 2220Document1 pageDrive Design KPOC X-2210 & 2220FazliJaafarNo ratings yet
- 6 SpringsDocument91 pages6 SpringsROHAN PILLAINo ratings yet
- CH 06Document47 pagesCH 06ひたぎ 戦場ヶ原No ratings yet
- Machine Design, Engineering Materials and Machine Shop Problem Solving Examination No. 4 / Second Semester, A.Y. 2008-2009Document9 pagesMachine Design, Engineering Materials and Machine Shop Problem Solving Examination No. 4 / Second Semester, A.Y. 2008-2009maria katherine pantojaNo ratings yet
- Analysis of Gate 2011Document2 pagesAnalysis of Gate 2011kfdkfjdkNo ratings yet
- Drive Design KPOC X-2612 & 2622Document1 pageDrive Design KPOC X-2612 & 2622FazliJaafarNo ratings yet
- Helical Compressing Spring Calculation PDFDocument4 pagesHelical Compressing Spring Calculation PDFViktor KovtunNo ratings yet
- TutorialDocument5 pagesTutorialAbdul Razak RahmatNo ratings yet
- Assignment Road Constuction IIDocument6 pagesAssignment Road Constuction IIKry ThanakNo ratings yet
- Multi CropDocument19 pagesMulti Croppramo_dassNo ratings yet
- Base Isolation DesignDocument23 pagesBase Isolation Designprraaddeej chatel100% (1)
- One Way SlabDocument23 pagesOne Way SlabmeerahNo ratings yet
- Design of Continuos Beam As Per IS 456-2000 1) Design Data: Eff CK 2 2Document5 pagesDesign of Continuos Beam As Per IS 456-2000 1) Design Data: Eff CK 2 2khaniskhan03No ratings yet
- Singly and Doubly Reinforced BeamsDocument16 pagesSingly and Doubly Reinforced BeamsGodfrey RuizNo ratings yet
- Belt Drive Transmission CalculationsDocument26 pagesBelt Drive Transmission CalculationsAllen Generis100% (1)
- Mechanical Characterization of Materials and Wave Dispersion: Instrumentation and Experiment InterpretationFrom EverandMechanical Characterization of Materials and Wave Dispersion: Instrumentation and Experiment InterpretationYvon ChevalierNo ratings yet
- MVSR Engineering College Digital Manufacturing ParticipantsDocument2 pagesMVSR Engineering College Digital Manufacturing ParticipantsThamizh Selvan S100% (1)
- ME6601Document2 pagesME6601Thamizh Selvan SNo ratings yet
- Information To Participants - OnlineDocument1 pageInformation To Participants - OnlineThamizh Selvan SNo ratings yet
- Paper 2Document13 pagesPaper 2Thamizh Selvan SNo ratings yet
- Paper 1Document27 pagesPaper 1Thamizh Selvan SNo ratings yet
- 13n08me2302 5Document4 pages13n08me2302 5Thamizh Selvan SNo ratings yet
- Continuous Comprehensive Assessment of AttendeesDocument1 pageContinuous Comprehensive Assessment of AttendeesThamizh Selvan SNo ratings yet
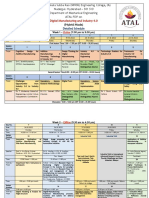
- MVSR Engineering College Atal FDP on Digital Manufacturing and Industry 4.0 ScheduleDocument2 pagesMVSR Engineering College Atal FDP on Digital Manufacturing and Industry 4.0 ScheduleThamizh Selvan SNo ratings yet
- 11j08me2302 5Document3 pages11j08me2302 5Thamizh Selvan SNo ratings yet
- Panimalar Engineering College Mechanical Engineering IA-II Dynamics of MachinesDocument4 pagesPanimalar Engineering College Mechanical Engineering IA-II Dynamics of MachinesThamizh Selvan SNo ratings yet
- Syllabus DOMDocument3 pagesSyllabus DOMThamizh Selvan SNo ratings yet
- Panimalar Engineering College Mechanical Engineering IA-II Dynamics of MachinesDocument4 pagesPanimalar Engineering College Mechanical Engineering IA-II Dynamics of MachinesThamizh Selvan SNo ratings yet
- Dodge Avenger IAT Sensor DTC P0112 P0113 FixDocument7 pagesDodge Avenger IAT Sensor DTC P0112 P0113 Fixflash_24014910No ratings yet
- FusionServer++X6000+V6+High Density+Server+DatasheetDocument5 pagesFusionServer++X6000+V6+High Density+Server+Datasheetsetyo210391No ratings yet
- Compal Confidential MB Schematic Document for EH50F/EH70F/EH51F/EH5VF/EH53F/EH73F laptop modelsDocument100 pagesCompal Confidential MB Schematic Document for EH50F/EH70F/EH51F/EH5VF/EH53F/EH73F laptop modelsЮра Иванов0% (1)
- EC206 CO Modelqn2 Ktustudents - inDocument3 pagesEC206 CO Modelqn2 Ktustudents - ingpuonlineNo ratings yet
- TEA1522PDocument17 pagesTEA1522PRjati devamNo ratings yet
- Bosch gas hobs deliver precision cooking with innovative technologyDocument55 pagesBosch gas hobs deliver precision cooking with innovative technologyshabeer7863No ratings yet
- FS20 FT2040 / FC2020 / FC2030 FC2040 / FC2060: Montage Installation Montage Montaje MontaggioDocument10 pagesFS20 FT2040 / FC2020 / FC2030 FC2040 / FC2060: Montage Installation Montage Montaje MontaggiomxnoxnNo ratings yet
- IE-5000-12S12P-10G Datasheet: Quick SpecDocument4 pagesIE-5000-12S12P-10G Datasheet: Quick SpeczvideozNo ratings yet
- Trolley TR-20 User ManualDocument17 pagesTrolley TR-20 User ManualСергей МакановNo ratings yet
- Am-11.65.030 Kdl32-Mono InstalDocument82 pagesAm-11.65.030 Kdl32-Mono InstalMike Rushe100% (1)
- Circuit Diagrams and PWB Layouts: PSU: Power Supply Unit (32")Document3 pagesCircuit Diagrams and PWB Layouts: PSU: Power Supply Unit (32")Gleison GomesNo ratings yet
- Monthly Plan Filter Agustus 2022Document91 pagesMonthly Plan Filter Agustus 2022Andi AlfianNo ratings yet
- OMM807100043 - 3 (PID Controller Manual)Document98 pagesOMM807100043 - 3 (PID Controller Manual)cengiz kutukcu100% (3)
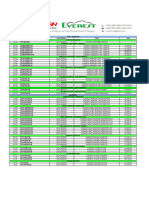
- EVERESTDocument1 pageEVERESTShiena OrevinNo ratings yet
- Data Bulletin Ground-Fault Systems For Circuit Breakers Equipped With Micrologic™ Electronic Trip UnitsDocument4 pagesData Bulletin Ground-Fault Systems For Circuit Breakers Equipped With Micrologic™ Electronic Trip UnitsKarthik MandyaNo ratings yet
- Max torque 67 Nm air turbine starter specsDocument1 pageMax torque 67 Nm air turbine starter specsark bilal jj5No ratings yet
- Electrical Schemati Iw55/110btd Punch&shear Hyd DurmaDocument12 pagesElectrical Schemati Iw55/110btd Punch&shear Hyd DurmaÁLVARO IVÁN SANDOVAL TARAZONANo ratings yet
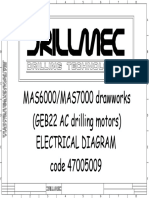
- (GEB22 AC Drilling Motors) MAS6000/MAS7000 DrawworksDocument9 pages(GEB22 AC Drilling Motors) MAS6000/MAS7000 DrawworksAli AliNo ratings yet
- Cummins QSM11 engine spare parts listDocument167 pagesCummins QSM11 engine spare parts listIvan Martínez LopezNo ratings yet
- Ceiling Concealed DuctsDocument2 pagesCeiling Concealed Ductsvishal vananiNo ratings yet
- Manual de Instalação ASBA24JFCDocument19 pagesManual de Instalação ASBA24JFCSCS AssistenteNo ratings yet
- Helisem VRH Datasheet WDocument4 pagesHelisem VRH Datasheet WKali Dass KMNo ratings yet
- E-11 - 4 TRX Vhf-Am Ground To Air (Gta)Document3 pagesE-11 - 4 TRX Vhf-Am Ground To Air (Gta)Andre AryaNo ratings yet
- Doosan DX170W Rubber Tyred ExcavatorDocument20 pagesDoosan DX170W Rubber Tyred ExcavatorGogyNo ratings yet
- Eaton Control Panel Design Guide NewarkDocument36 pagesEaton Control Panel Design Guide NewarkDavid LucioNo ratings yet
- North America - Construction RangeDocument36 pagesNorth America - Construction RangeDesign2 DepartmentNo ratings yet
- Lesson Plan in Tle June 17-21 G7-10Document3 pagesLesson Plan in Tle June 17-21 G7-10Verna Lois ArasainNo ratings yet
- Operator's manual for RAINBOW 201 HF - 182 HF PRO - 202 HF PRO welding machinesDocument20 pagesOperator's manual for RAINBOW 201 HF - 182 HF PRO - 202 HF PRO welding machinesАлександар ТрајчевскиNo ratings yet
- TX109LRS ManualDocument1 pageTX109LRS ManualKerwin CastañedaNo ratings yet
- 8.0 Inch IPS MIPI 800x1280 AML08021016-31DDocument13 pages8.0 Inch IPS MIPI 800x1280 AML08021016-31DcalvinkleinwuNo ratings yet