You might also like
- RF-Amp S20 S21 Technical ManualDocument169 pagesRF-Amp S20 S21 Technical ManualKIRILLNo ratings yet
- Shows How To Use The RTTS To Create A Dynamic Internal TableDocument4 pagesShows How To Use The RTTS To Create A Dynamic Internal TableMann SlaymannNo ratings yet
- Project Setup: The Data: Semester 1 Project Enhancements Instructions For StudentsDocument6 pagesProject Setup: The Data: Semester 1 Project Enhancements Instructions For StudentsKady Gisselle GomézNo ratings yet
- Simulation of Digital Communication Systems Using MatlabFrom EverandSimulation of Digital Communication Systems Using MatlabRating: 3.5 out of 5 stars3.5/5 (22)
- MIMO OFDM Limted FeedbackDocument6 pagesMIMO OFDM Limted FeedbackYasser NaguibNo ratings yet
- Branko Ajzele - Magento 2 Development Quick Start Guide - Build Better Stores by Extending Magento-Packt Publishing (2018)Document208 pagesBranko Ajzele - Magento 2 Development Quick Start Guide - Build Better Stores by Extending Magento-Packt Publishing (2018)Iulian SymplutzNo ratings yet
- Transformer Neural Network: BY Tharun E 1MS18CS127 Under The Guidance of Ganeshayya ShidagantiDocument17 pagesTransformer Neural Network: BY Tharun E 1MS18CS127 Under The Guidance of Ganeshayya ShidagantiRiddhi SinghalNo ratings yet
- Transformers For VisionDocument28 pagesTransformers For VisionAli HaiderNo ratings yet
- Electronics 10 01117 v2Document27 pagesElectronics 10 01117 v2Bảo Ngọc LêNo ratings yet
- ViT Survey On SegmentationDocument30 pagesViT Survey On SegmentationopekkhasuNo ratings yet
- Signal Processing Using FPGA StructuresDocument7 pagesSignal Processing Using FPGA StructuresMax dos santos ramosNo ratings yet
- Transfuse: Fusing Transformers and Cnns For Medical Image SegmentationDocument9 pagesTransfuse: Fusing Transformers and Cnns For Medical Image SegmentationseddikNo ratings yet
- Feng Liang Et Al - 2021 - Efficient Neural Network Using Pointwise Convolution Kernels With Linear PhaseDocument8 pagesFeng Liang Et Al - 2021 - Efficient Neural Network Using Pointwise Convolution Kernels With Linear Phasebigliang98No ratings yet
- Guided Image FilteringDocument13 pagesGuided Image FilteringAnonymous ECbYmOF7No ratings yet
- Semantic Image Segmentation With Task-Specific Edge Detection Using Cnns and A Discriminatively Trained Domain TransformDocument10 pagesSemantic Image Segmentation With Task-Specific Edge Detection Using Cnns and A Discriminatively Trained Domain TransformUnaixa KhanNo ratings yet
- RNN-Based Radio Resource Management OnDocument14 pagesRNN-Based Radio Resource Management OnTRIAD TECHNO SERVICESNo ratings yet
- High Speed and Area Efficient Fpga Implementation of Fir Filter Using Distributed ArithmeticDocument7 pagesHigh Speed and Area Efficient Fpga Implementation of Fir Filter Using Distributed ArithmeticZulfiqar AliNo ratings yet
- DWT SpihtDocument8 pagesDWT SpihtPavan GaneshNo ratings yet
- Learning How To Transfer From Uplink To Downlink Via Hyper-Recurrent Neural Network For FDD Massive MIMODocument15 pagesLearning How To Transfer From Uplink To Downlink Via Hyper-Recurrent Neural Network For FDD Massive MIMOelsieduNo ratings yet
- WDM Basics - Volume 2.0Document4 pagesWDM Basics - Volume 2.0liiNo ratings yet
- DSP Engine For Ultra-Low-Power Audio Applications: Slink4 (32Document4 pagesDSP Engine For Ultra-Low-Power Audio Applications: Slink4 (32kamelNo ratings yet
- ChehailtyDocument1 pageChehailtyayoub bentaibiNo ratings yet
- An FPGA Based Microblaze Soft Core Architecture For 2D-LiftingDocument8 pagesAn FPGA Based Microblaze Soft Core Architecture For 2D-LiftingpriyabinduNo ratings yet
- 1997 TCASII I. Galton Spectral Shaping of Circuit Errors in Digital To Analog ConvertersDocument10 pages1997 TCASII I. Galton Spectral Shaping of Circuit Errors in Digital To Analog Converterskijiji userNo ratings yet
- Gap Method For Keyword Spotting: Varsha Thakur, HimanisikarwarDocument7 pagesGap Method For Keyword Spotting: Varsha Thakur, HimanisikarwarSunil ChaluvaiahNo ratings yet
- Filterbank Based Multi Carrier Transmission (FBMC) - Evolving OFDMDocument8 pagesFilterbank Based Multi Carrier Transmission (FBMC) - Evolving OFDMdfhgNo ratings yet
- Features of Wavelet Packet Decomposition and Discrete Wavelet Transform For Malayalam Speech RecognitionDocument4 pagesFeatures of Wavelet Packet Decomposition and Discrete Wavelet Transform For Malayalam Speech RecognitionMaher Khalaf HussienNo ratings yet
- A Survey On Vision TransformerDocument23 pagesA Survey On Vision TransformerLưu HảiNo ratings yet
- A Transformation For Digital Simulation of Analog FiltersDocument5 pagesA Transformation For Digital Simulation of Analog FiltersramyradyNo ratings yet
- Deep Learning Unit-IIIDocument9 pagesDeep Learning Unit-IIIAnonymous xMYE0TiNBcNo ratings yet
- Convolutional Neural Networks For Image Processing: An Application in Robot VisionDocument14 pagesConvolutional Neural Networks For Image Processing: An Application in Robot Visionvamsidhar2008No ratings yet
- Pay Attention To MlpsDocument15 pagesPay Attention To MlpsMuhammad Fhadli SullivanNo ratings yet
- SISR TransformerDocument10 pagesSISR Transformersahildharme8No ratings yet
- Triplett Loss FunctionDocument11 pagesTriplett Loss FunctionMario Galindo QueraltNo ratings yet
- An Area-Efficient 2-D Convolution Implementation On FPGA For Space ApplicationsDocument6 pagesAn Area-Efficient 2-D Convolution Implementation On FPGA For Space ApplicationsCường Dương QuốcNo ratings yet
- An Introduction To Deep Learning For The Physical LayerDocument13 pagesAn Introduction To Deep Learning For The Physical Layerzhouxinzhao0211No ratings yet
- Roburst Implementation of OFDM System Using VHDL: AbstractDocument7 pagesRoburst Implementation of OFDM System Using VHDL: AbstractFilipe RodriguesNo ratings yet
- SDR Applications Using VLSI Design of Reconfigurable DevicesDocument6 pagesSDR Applications Using VLSI Design of Reconfigurable DevicesSteveNo ratings yet
- Design and VLSI Implementation of CSD Based DA Architecture For 5/3 DWTDocument5 pagesDesign and VLSI Implementation of CSD Based DA Architecture For 5/3 DWTSadaf JavedNo ratings yet
- Complex FiltersDocument14 pagesComplex Filterswrite2arshad_mNo ratings yet
- FPGA Implementation of Discrete Wavelet Transform For Jpeg2000Document3 pagesFPGA Implementation of Discrete Wavelet Transform For Jpeg2000attardecp4888No ratings yet
- IJCSE 01931mardin PDFDocument7 pagesIJCSE 01931mardin PDFhazemNo ratings yet
- Scholz 2018Document9 pagesScholz 2018zhaoyan310034No ratings yet
- Politecnico Di Torino Porto Institutional RepositoryDocument4 pagesPolitecnico Di Torino Porto Institutional RepositoryShafayatNo ratings yet
- M - S C A D C: Ulti Cale Ontext Ggregation by Ilated OnvolutionsDocument13 pagesM - S C A D C: Ulti Cale Ontext Ggregation by Ilated OnvolutionsyyscribdNo ratings yet
- FWF MMTC e LetterDocument3 pagesFWF MMTC e LetterMalu MohanNo ratings yet
- 2021 ICCV Multiscale Vision Transformers Fan, XiongDocument12 pages2021 ICCV Multiscale Vision Transformers Fan, XiongManuel AlvarezNo ratings yet
- Swin Transformer: Hierarchical Vision Transformer Using Shifted WindowsDocument14 pagesSwin Transformer: Hierarchical Vision Transformer Using Shifted WindowsNguyễnHuyHùngNo ratings yet
- FPGA Based Area Efficient Edge Detection Filter For Image Processing ApplicationsDocument4 pagesFPGA Based Area Efficient Edge Detection Filter For Image Processing ApplicationsAnoop KumarNo ratings yet
- Topic 2: Molecular Dynamics of Lennard-Jones System (Continued)Document4 pagesTopic 2: Molecular Dynamics of Lennard-Jones System (Continued)Muklis LatifNo ratings yet
- General Architecture of Centralized Unit and Distributed Unit For New RadioDocument9 pagesGeneral Architecture of Centralized Unit and Distributed Unit For New RadioAmar KaidiNo ratings yet
- 5 Layers of A Convolutional Neural NetworkDocument15 pages5 Layers of A Convolutional Neural Networknawazk8191No ratings yet
- Signal Denoising by Wavelet Packet Transform On FPGA Technology - Ubiquitous Computing and Communication JournalDocument5 pagesSignal Denoising by Wavelet Packet Transform On FPGA Technology - Ubiquitous Computing and Communication JournalUbiquitous Computing and Communication JournalNo ratings yet
- UTNet A Hybrid Transformer Architecture For Medical Image Segmentation PDFDocument11 pagesUTNet A Hybrid Transformer Architecture For Medical Image Segmentation PDFdaisyNo ratings yet
- Algorithm and Architecture Optimization For 2D DisDocument17 pagesAlgorithm and Architecture Optimization For 2D DisMr GrachNo ratings yet
- DSCCDocument10 pagesDSCCpokemonbeast920No ratings yet
- Domain and Speaker Adaptation For Cortana Speech Recognition Yong Zhao, Jinyu Li, Shixiong Zhang, Liping Chen, and Yifan Gong Microsoft Corporation, One Microsoft Way, Redmond, WA 98052, USADocument5 pagesDomain and Speaker Adaptation For Cortana Speech Recognition Yong Zhao, Jinyu Li, Shixiong Zhang, Liping Chen, and Yifan Gong Microsoft Corporation, One Microsoft Way, Redmond, WA 98052, USARushiNo ratings yet
- A Novel Hybrid Dimming Control Scheme For Visible Light CommunicationsDocument13 pagesA Novel Hybrid Dimming Control Scheme For Visible Light CommunicationsnhatvpNo ratings yet
- Non-Local Neural NetworksDocument10 pagesNon-Local Neural NetworksEmran SalehNo ratings yet
- ZRP Ns2 ReportDocument63 pagesZRP Ns2 Reportأبو أيوب تافيلالتNo ratings yet
- Ijet V3i4p13Document6 pagesIjet V3i4p13International Journal of Engineering and TechniquesNo ratings yet
- Deep Learning Approach For Object Detection Using CNN: AbstractDocument7 pagesDeep Learning Approach For Object Detection Using CNN: AbstractAYUSH MISHRANo ratings yet
- Recurrent Memory Transformers 2207.06881Document18 pagesRecurrent Memory Transformers 2207.06881helloworld100No ratings yet
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonFrom EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonNo ratings yet
- Final Project Book - CSE E 65 DoneDocument62 pagesFinal Project Book - CSE E 65 Doneসজল আহমেদ আশফাকNo ratings yet
- Java Notes-2.Document142 pagesJava Notes-2.killerboy5652No ratings yet
- V1600D4-DP (V2.1) Datasheet-EN (无logo)Document2 pagesV1600D4-DP (V2.1) Datasheet-EN (无logo)Péricles ReisNo ratings yet
- IM FileDocument32 pagesIM FilePratham KakkarNo ratings yet
- Engineering Science and Technology, An International JournalDocument9 pagesEngineering Science and Technology, An International JournalVishwakNo ratings yet
- 461 - 03819-FAP130506 Internet of Things (IoT) Course Description Rev FDocument64 pages461 - 03819-FAP130506 Internet of Things (IoT) Course Description Rev FMaicl Purici100% (1)
- SPM Planning DocumentsDocument45 pagesSPM Planning Documentsnuhamin zNo ratings yet
- ODI and OBIEEDocument10 pagesODI and OBIEEManohar ReddyNo ratings yet
- 700BT DS 20220826Document28 pages700BT DS 20220826Reyna SafillaNo ratings yet
- Our LogDocument291 pagesOur LogAhmed SakrNo ratings yet
- Dell Networking s4048 On Spec SheetDocument4 pagesDell Networking s4048 On Spec Sheetlakis lalakis888No ratings yet
- Iaa202 - Lab 4 - Nguyentuanlinh - Se130002 - 26012021Document9 pagesIaa202 - Lab 4 - Nguyentuanlinh - Se130002 - 26012021Dang Viet My MyNo ratings yet
- Ebook Digital Design Principles and Practices PDF Full Chapter PDFDocument67 pagesEbook Digital Design Principles and Practices PDF Full Chapter PDFjimmie.kirby650100% (27)
- Unit 5Document60 pagesUnit 5testNo ratings yet
- Imx 8 MncecDocument114 pagesImx 8 MncecNoel LiarteNo ratings yet
- A Simpler Digital Cassette Tape Interface (Byte-1978-10)Document3 pagesA Simpler Digital Cassette Tape Interface (Byte-1978-10)Peeters GuyNo ratings yet
- Beigepaper: An Ethereum Technical Specification: 1. Imagining Bitcoin As A ComputerDocument25 pagesBeigepaper: An Ethereum Technical Specification: 1. Imagining Bitcoin As A ComputermbcNo ratings yet
- Icstation Com Esp8266 Wifi Channel Relay Module Rewitch Wireless Transmitter Smart Home P 13420 HTMLDocument1 pageIcstation Com Esp8266 Wifi Channel Relay Module Rewitch Wireless Transmitter Smart Home P 13420 HTMLMarck SolterNo ratings yet
- 19BCE0422Document3 pages19BCE0422Garvit AroraNo ratings yet
- IoT Communication TechnologiesDocument42 pagesIoT Communication TechnologiesdofilsenterpriseltdNo ratings yet
- Quiz 5 - CS690 A1 Network ..Document7 pagesQuiz 5 - CS690 A1 Network ..Nishant KawaNo ratings yet
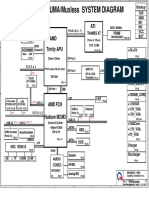
- R53 Amd Comal Uma/Muxless System Diagram: ATI AMD Trinity APUDocument44 pagesR53 Amd Comal Uma/Muxless System Diagram: ATI AMD Trinity APUKondrat SusipatovNo ratings yet
- Final ProjectDocument26 pagesFinal ProjectMuhammad Shahzaib SamiNo ratings yet
- Creating A Digital Timer Using Blynk: Step 1: Watch The VideoDocument4 pagesCreating A Digital Timer Using Blynk: Step 1: Watch The VideoPadala HarshithaNo ratings yet
- AAI Process DiscoveryDocument22 pagesAAI Process DiscoveryMartiniano MallavibarrenaNo ratings yet
- Implementation of Product Cipher Using Substitution and Transposition TechniqueDocument8 pagesImplementation of Product Cipher Using Substitution and Transposition TechniqueSonam GuptaNo ratings yet