You might also like
- M2an 1977 11 1 93 0Document16 pagesM2an 1977 11 1 93 0Zina SawafNo ratings yet
- Topic 2Document9 pagesTopic 2HENRY ZULUNo ratings yet
- Functional Equations For Fractal Interpolants Lj. M. Koci C and A. C. SimoncelliDocument12 pagesFunctional Equations For Fractal Interpolants Lj. M. Koci C and A. C. SimoncelliSilvia PalascaNo ratings yet
- LE3 Review Questions Math 21: Elementary Analysis 1Document5 pagesLE3 Review Questions Math 21: Elementary Analysis 1tqlittonNo ratings yet
- Numerical Integration: Msa / L-6 Cse-3512 - Numerical Methods 27 January, 2005Document3 pagesNumerical Integration: Msa / L-6 Cse-3512 - Numerical Methods 27 January, 2005Al Asad Nur RiyadNo ratings yet
- Global Solutions to Functional Integral EquationsDocument10 pagesGlobal Solutions to Functional Integral EquationsLuis FuentesNo ratings yet
- Notes On 1 Particle ScatteringDocument5 pagesNotes On 1 Particle ScatteringJuliana HarmatiukNo ratings yet
- Numerical Approximation of Weakly Singular 2002 Journal of Computational andDocument12 pagesNumerical Approximation of Weakly Singular 2002 Journal of Computational andTuyệt Thư MậtNo ratings yet
- Shaomei Fang Jinyan Li and Zhenfu CaiDocument9 pagesShaomei Fang Jinyan Li and Zhenfu CaiGHERFI ABDELHAFIDNo ratings yet
- 1 s2.0 S0377042707005nDocument18 pages1 s2.0 S0377042707005n青山漫步No ratings yet
- dg1 hw2 SolutionsDocument9 pagesdg1 hw2 Solutionschristophercabezas93No ratings yet
- 4 - Proof of Existance and Uniqueness of SolutionsDocument12 pages4 - Proof of Existance and Uniqueness of SolutionsNobody KnowsNo ratings yet
- Diff NotesDocument10 pagesDiff Notesomsaiboggala811No ratings yet
- Hermite Mean Value Interpolation: Christopher Dyken and Michael FloaterDocument18 pagesHermite Mean Value Interpolation: Christopher Dyken and Michael Floatersanh137No ratings yet
- Collocation Method For Approximate Solution of Volterra - 2020 - Applied NumericDocument10 pagesCollocation Method For Approximate Solution of Volterra - 2020 - Applied NumericYahya NasiriNo ratings yet
- TriangleDocument6 pagesTrianglePardeep SinghNo ratings yet
- Clavero-Jorge2017 Article AFractionalStepMethodFor2DParaDocument18 pagesClavero-Jorge2017 Article AFractionalStepMethodFor2DParajoginder singhNo ratings yet
- Metodo de HeunDocument6 pagesMetodo de HeunNilton Isaias Mariños HerreraNo ratings yet
- Prof. Madhusudan Manjunath, IIT Bombay Calculus: Lecture 28Document19 pagesProf. Madhusudan Manjunath, IIT Bombay Calculus: Lecture 28King of KingsNo ratings yet
- Generalized Fractional Integration of H FunctionDocument12 pagesGeneralized Fractional Integration of H FunctionMonica Chipana MarcasNo ratings yet
- Pde CaracteristicasDocument26 pagesPde CaracteristicasAnonymous Vd26Pzpx80No ratings yet
- A Note On Best Approximation and Quasiconvex MultimapsDocument5 pagesA Note On Best Approximation and Quasiconvex MultimapsluisentropiaNo ratings yet
- Eu 2Document15 pagesEu 2Ayush BhadauriaNo ratings yet
- Le Rabczuk Mai-Duy Tran-Cong CMES 2010 AVDocument32 pagesLe Rabczuk Mai-Duy Tran-Cong CMES 2010 AVRedouane RedaNo ratings yet
- MATH207 - Assignment 1Document1 pageMATH207 - Assignment 1BinoNo ratings yet
- Fixed Points For Fuzzy Quasi-Contractions in Fuzzy Metric Spaces Endowed With A GraphDocument18 pagesFixed Points For Fuzzy Quasi-Contractions in Fuzzy Metric Spaces Endowed With A GraphTalha WaheedNo ratings yet
- Opuscula Math 3205 PDFDocument8 pagesOpuscula Math 3205 PDFAntonio Torres PeñaNo ratings yet
- PP 28Document2 pagesPP 28Akshat MittalNo ratings yet
- A Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemDocument10 pagesA Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemAnibal Coronel PerezNo ratings yet
- Integral Equations, Implicit Functions, and Fixed Points: V (T, X) S T, H (T, S, X(S) ) DsDocument8 pagesIntegral Equations, Implicit Functions, and Fixed Points: V (T, X) S T, H (T, S, X(S) ) DsMuhammad AmarNo ratings yet
- Monte Carlo Simulation TechniquesDocument3 pagesMonte Carlo Simulation TechniquessdaetwylerNo ratings yet
- MA 201 Lecture on Solving Quasilinear PDEsDocument19 pagesMA 201 Lecture on Solving Quasilinear PDEsBeetu MaanNo ratings yet
- Laplace EquationDocument5 pagesLaplace Equationshriramnimbalkar99No ratings yet
- THE EULER EQUATIONS OF PROBLEMS OF THE CALCULUS OF VARIATIONS WITH PRESCRIBED TRANSVERSALITY CONDITIONSDocument5 pagesTHE EULER EQUATIONS OF PROBLEMS OF THE CALCULUS OF VARIATIONS WITH PRESCRIBED TRANSVERSALITY CONDITIONSMizanur RahmanNo ratings yet
- 10 32323-Ujma 406335-598993Document4 pages10 32323-Ujma 406335-598993عبد الله الخالدNo ratings yet
- Applied Mathematics and Computation paper on numerical methodsDocument1 pageApplied Mathematics and Computation paper on numerical methodsjoginder singhNo ratings yet
- Cal211-CC05-GROUP 8Document11 pagesCal211-CC05-GROUP 8danh.tran214No ratings yet
- The Averaging Principle of Hilfer Fractional Stochastic Delay Differential Equations With Poisson JumpsDocument7 pagesThe Averaging Principle of Hilfer Fractional Stochastic Delay Differential Equations With Poisson JumpsWaqar HassanNo ratings yet
- Partial Differential Equations (Week 2) First Order Pdes: Gustav Holzegel January 24, 2019Document16 pagesPartial Differential Equations (Week 2) First Order Pdes: Gustav Holzegel January 24, 2019PLeaseNo ratings yet
- The Use of Adomian Decomposition Method For Solving A Specific Nonlinear Partial Differential EquationsDocument7 pagesThe Use of Adomian Decomposition Method For Solving A Specific Nonlinear Partial Differential EquationsBhavna MatwaniNo ratings yet
- Spiral Singularities of A SemiflowDocument14 pagesSpiral Singularities of A SemiflowKamil DunstNo ratings yet
- 9b9756b6f73bfd0c558e4ea9a933650d_MIT8_324F10_Lecture11Document5 pages9b9756b6f73bfd0c558e4ea9a933650d_MIT8_324F10_Lecture11Ayham ziadNo ratings yet
- Equadiff Vienne 2007Document6 pagesEquadiff Vienne 2007hhedfiNo ratings yet
- GEOMETRY OF THE COTANGENT BUNDLES WITH SASAKIAN METRICS AND HARMONIC MAPSDocument9 pagesGEOMETRY OF THE COTANGENT BUNDLES WITH SASAKIAN METRICS AND HARMONIC MAPSهشام الهنديNo ratings yet
- Spring 2005 SolutionsDocument11 pagesSpring 2005 SolutionsÖzge TüncelNo ratings yet
- Two-Dimensional Inverse Boundary Value Problem ForDocument17 pagesTwo-Dimensional Inverse Boundary Value Problem ForalissiachantoutNo ratings yet
- Vectorized Matlab Codes For Linear Two-Dimensional ElasticityDocument16 pagesVectorized Matlab Codes For Linear Two-Dimensional ElasticityVincent CucumazzøNo ratings yet
- Numerical Integration - IDocument22 pagesNumerical Integration - Iroysoumyadeep2013No ratings yet
- The Hilber-Hughes-Taylor-α (HHT-α) method compared withDocument14 pagesThe Hilber-Hughes-Taylor-α (HHT-α) method compared withnabin nitNo ratings yet
- Computing The Hilbert Transform and Its Inverse PDFDocument28 pagesComputing The Hilbert Transform and Its Inverse PDFMichael MargoleseNo ratings yet
- CS229 Problem Set #1: Supervised LearningDocument8 pagesCS229 Problem Set #1: Supervised LearningangieNo ratings yet
- Ps 1Document25 pagesPs 1Khả UyênNo ratings yet
- dg1 hw5 SolutionsDocument11 pagesdg1 hw5 Solutionschristophercabezas93No ratings yet
- Chap 5.4Document18 pagesChap 5.4ntokozocecilia81No ratings yet
- Mathematics I en Chapter 1Document11 pagesMathematics I en Chapter 1sempiNo ratings yet
- Geometry of Maps from R2 to R2 NotesDocument3 pagesGeometry of Maps from R2 to R2 NotesFgh FhNo ratings yet
- Differential Calculus: Pierre SchapiraDocument60 pagesDifferential Calculus: Pierre SchapiraMatthew HullNo ratings yet
- Stationary PhaseDocument20 pagesStationary PhaseJhonny RomeroNo ratings yet
- Mixed Constrained Control Problems: Maria Do Rosário de PinhoDocument15 pagesMixed Constrained Control Problems: Maria Do Rosário de PinhoSantos QuezadaNo ratings yet
- 1 s2.0 S0021999115006622 Main PDFDocument16 pages1 s2.0 S0021999115006622 Main PDF青山漫步No ratings yet
- 1 s2.0 S0898122102002122 Main PDFDocument9 pages1 s2.0 S0898122102002122 Main PDF青山漫步No ratings yet
- Generalized Poincaré–Bertrand Formula on HypersurfacesDocument17 pagesGeneralized Poincaré–Bertrand Formula on Hypersurfaces青山漫步No ratings yet
- Quadrature em PDFDocument13 pagesQuadrature em PDF青山漫步No ratings yet
- s10543 018 0730 0 PDFDocument27 pagess10543 018 0730 0 PDF青山漫步No ratings yet
- Gauss-Radau and Gauss-Lobatto quadratures for functions with double endpointsDocument18 pagesGauss-Radau and Gauss-Lobatto quadratures for functions with double endpoints青山漫步No ratings yet
- s0036142995287847 PDFDocument26 pagess0036142995287847 PDF青山漫步No ratings yet
- Resultant Formulas for Chebyshev PolynomialsDocument9 pagesResultant Formulas for Chebyshev Polynomials青山漫步No ratings yet
- Transforming Boundary Element Integrals for Improved AccuracyDocument21 pagesTransforming Boundary Element Integrals for Improved Accuracy青山漫步No ratings yet
- Solving Inverse Problems Using Data-Driven ModelsDocument174 pagesSolving Inverse Problems Using Data-Driven Models青山漫步No ratings yet
- 1 s2.0 S0377042707005nDocument18 pages1 s2.0 S0377042707005n青山漫步No ratings yet
- Journal of Computational and Applied Mathematics: Periodizing transformations for numerical integrationDocument8 pagesJournal of Computational and Applied Mathematics: Periodizing transformations for numerical integration青山漫步No ratings yet
- Business Research Methods-SyllabusDocument3 pagesBusiness Research Methods-SyllabusSiddhant SinghNo ratings yet
- Descriptive Statistics for Socioeconomic FactorsDocument21 pagesDescriptive Statistics for Socioeconomic FactorssyazwanNo ratings yet
- Convergence and continuity problems for sequences and seriesDocument5 pagesConvergence and continuity problems for sequences and seriesCharan KilariNo ratings yet
- Principal Component Analysis and Near Infrared Spectros PDFDocument7 pagesPrincipal Component Analysis and Near Infrared Spectros PDFJuanNo ratings yet
- Educational ResearchDocument77 pagesEducational ResearchTariq AhmadNo ratings yet
- Proposal An Analysis of Figurative Language in Khalid'S AlbumsDocument15 pagesProposal An Analysis of Figurative Language in Khalid'S AlbumsPaulina Dawa GunduNo ratings yet
- DocxDocument13 pagesDocxChow DhuryNo ratings yet
- 1990 Determination Antazoline W NapthazolineDocument20 pages1990 Determination Antazoline W NapthazolineMohammed Ali SalihNo ratings yet
- Chemical Methods For Domoic Acid The Amnesic ShellDocument19 pagesChemical Methods For Domoic Acid The Amnesic ShellKatty ZanabriaNo ratings yet
- Assignment On Bayes' TheormDocument5 pagesAssignment On Bayes' TheormmohitdinoNo ratings yet
- Modified Euler MethodDocument5 pagesModified Euler MethodSaiVenkat100% (1)
- The AP Calculus Problem Book: Chuck Garner, PH.DDocument354 pagesThe AP Calculus Problem Book: Chuck Garner, PH.DUy Dinh100% (1)
- Numerical ODE Solutions Methods for Engineering ProblemsDocument2 pagesNumerical ODE Solutions Methods for Engineering ProblemsPrashant KulkarniNo ratings yet
- Paper Prediction: Ostl Mini Project 1.hrutwika Ambavane 2.juili Kadu 3. Bhavesh Bawankar 4.akshat SinghDocument13 pagesPaper Prediction: Ostl Mini Project 1.hrutwika Ambavane 2.juili Kadu 3. Bhavesh Bawankar 4.akshat SinghJuili KNo ratings yet
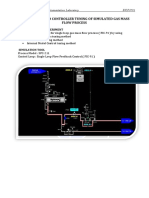
- Experiment 7: Pid Controller Tuning of Simulated Gas Mass Flow ProcessDocument6 pagesExperiment 7: Pid Controller Tuning of Simulated Gas Mass Flow ProcessPMNo ratings yet
- Business Applications of Measure of Central TendencyDocument2 pagesBusiness Applications of Measure of Central TendencyVidya Hegde Kavitasphurti100% (2)
- DifferentiationDocument110 pagesDifferentiationRezin DotimasNo ratings yet
- Lab Manual 8Document12 pagesLab Manual 8HasanNo ratings yet
- Mathematics - Ijmcar - An Approach For Continuous Method For The GeneralDocument12 pagesMathematics - Ijmcar - An Approach For Continuous Method For The GeneralTJPRC PublicationsNo ratings yet
- bms4 1Document2 pagesbms4 1nitin_jaiswal080No ratings yet
- Statistics Hypothesis TestingDocument48 pagesStatistics Hypothesis Testing19M231 - N KARENNo ratings yet
- CBSE Class 11 Assignment For Complex Numbers and Quadratic Equations PDFDocument2 pagesCBSE Class 11 Assignment For Complex Numbers and Quadratic Equations PDFanimeshtechnosNo ratings yet
- 2016 MidDocument6 pages2016 MidAazmeer RahmanNo ratings yet
- A Numerical Study of Steklov Eigenvalue Problem Via Conformal MappingDocument23 pagesA Numerical Study of Steklov Eigenvalue Problem Via Conformal MappingGonzalo RiveraNo ratings yet
- The Unscrambler Methods - CAMO SoftwareDocument288 pagesThe Unscrambler Methods - CAMO SoftwareMohammad Sofiqur RahmanNo ratings yet
- Rubric Individual Case Study Assignment 2 - Inferential Statistics (35%)Document3 pagesRubric Individual Case Study Assignment 2 - Inferential Statistics (35%)Ben GeraghtyNo ratings yet
- CalculatorDocument33 pagesCalculatorMelvin EsguerraNo ratings yet
- AAS Data AnalysisDocument2 pagesAAS Data AnalysisGian MeniaNo ratings yet
- Chapter 11 Fourier Analysis PDFDocument165 pagesChapter 11 Fourier Analysis PDFjohnhenryyambaoNo ratings yet
- Lecture1 introductionPCADocument75 pagesLecture1 introductionPCAjiayuan0113No ratings yet
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceFrom EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNo ratings yet
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Assessment Prep for Common Core Mathematics, Grade 6From EverandAssessment Prep for Common Core Mathematics, Grade 6Rating: 5 out of 5 stars5/5 (1)