You might also like
- Outline: - Introduction To Signal Flow Graphs - Signal-Flow Graph Models - BD To SFG - Mason's Gain FormulaDocument22 pagesOutline: - Introduction To Signal Flow Graphs - Signal-Flow Graph Models - BD To SFG - Mason's Gain FormulaShreya TripathiNo ratings yet
- Feedback and Control System: Signal Flow GraphsDocument59 pagesFeedback and Control System: Signal Flow GraphsBenj MendozaNo ratings yet
- 33333CON1 (Signal Flow Graph)Document60 pages33333CON1 (Signal Flow Graph)Ahmed JamalNo ratings yet
- Lesson M3a Signal Flow Graphs Block DiagramsDocument30 pagesLesson M3a Signal Flow Graphs Block DiagramsAsif NoorNo ratings yet
- Lecture 10Document60 pagesLecture 10Dilshad CiziriNo ratings yet
- Reduce The Block Diagram Shown in To A Single Transfer FunctionDocument7 pagesReduce The Block Diagram Shown in To A Single Transfer FunctionMike PosktovaNo ratings yet
- 1.3 Signal Flow GraphDocument33 pages1.3 Signal Flow Graphearnest normanNo ratings yet
- Signal-Flow Graphs & Mason's RuleDocument18 pagesSignal-Flow Graphs & Mason's RuleRemuel ArellanoNo ratings yet
- lecture - 5-2 - signal - flow - graphs المنهج PDFDocument60 pageslecture - 5-2 - signal - flow - graphs المنهج PDFTariq ZeyadNo ratings yet
- M9 - Ch-5 - Reduction of Multiple Subsystems-Part-2 (D)Document68 pagesM9 - Ch-5 - Reduction of Multiple Subsystems-Part-2 (D)Shuvro Sankar SenNo ratings yet
- CS 18EC43-M2-Part-2-SFG - 2022Document54 pagesCS 18EC43-M2-Part-2-SFG - 2022Ritika SahuNo ratings yet
- Regulation & Control Ppt-1Document55 pagesRegulation & Control Ppt-1tadiwosNo ratings yet
- Overview of Signal Flow GraphsDocument45 pagesOverview of Signal Flow GraphsFahmeed Ali MeoNo ratings yet
- Topological Sorting: Directed Acyclic GraphDocument22 pagesTopological Sorting: Directed Acyclic Graphmark edwardsNo ratings yet
- Signal Flow GraphDocument29 pagesSignal Flow GraphAhsan MoinNo ratings yet
- On Signal Flow Graph Signal Flow GraphDocument20 pagesOn Signal Flow Graph Signal Flow Graphrub786No ratings yet
- Lecture 5-2 Signal Flow Graphs PDFDocument60 pagesLecture 5-2 Signal Flow Graphs PDFالبياتي محمدNo ratings yet
- Signal Flow GraphsDocument12 pagesSignal Flow GraphsDurveshNo ratings yet
- Block Reduction and Masons Rule - 1Document52 pagesBlock Reduction and Masons Rule - 1dedekNo ratings yet
- Signal Flow GraphDocument7 pagesSignal Flow GraphLeeNo ratings yet
- Biomedical Control Systems (BCS) : Module Leader: DR Muhammad ArifDocument31 pagesBiomedical Control Systems (BCS) : Module Leader: DR Muhammad ArifBhavik PrajapatiNo ratings yet
- 1509846749lecture 11. 2k14eee Signal Flow GraphDocument62 pages1509846749lecture 11. 2k14eee Signal Flow GraphAmin KhanNo ratings yet
- Introduction To Signal Flow Graph (SFG) : Samuel Jefferson MasonDocument30 pagesIntroduction To Signal Flow Graph (SFG) : Samuel Jefferson MasonSirshenduNo ratings yet
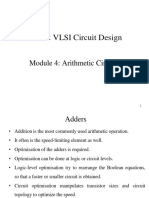
- Adders and MultipliersDocument59 pagesAdders and Multipliersdbanbumani_501791840No ratings yet
- Chapter 1 Group 6Document36 pagesChapter 1 Group 6wegeneargow11No ratings yet
- Unit I - Systems and Modelling: B.E., EEE, Semester 4, AY 2023-2024Document20 pagesUnit I - Systems and Modelling: B.E., EEE, Semester 4, AY 2023-2024Dr. C. V.No ratings yet
- 2 - Combinational Logic CircuitsDocument56 pages2 - Combinational Logic CircuitsSiegrique Ceasar A. JalwinNo ratings yet
- Digital Control System ModellingDocument28 pagesDigital Control System ModellingSonam AlviNo ratings yet
- Signal Flow GraphDocument48 pagesSignal Flow GraphsufyanNo ratings yet
- Chapter 5 - Combinational Logic (EEEg4302)Document41 pagesChapter 5 - Combinational Logic (EEEg4302)Toli fiqeeNo ratings yet
- Signal Flow GraphDocument13 pagesSignal Flow Graphee210002004No ratings yet
- ECT 304: VLSI Circuit Design: Module 4: Arithmetic CircuitsDocument41 pagesECT 304: VLSI Circuit Design: Module 4: Arithmetic CircuitsTony StarkNo ratings yet
- 6 - Signal Flow GraphsDocument59 pages6 - Signal Flow GraphsSuyash Dahake VlogsNo ratings yet
- Chapter 4Document118 pagesChapter 4Arham SiddiquiNo ratings yet
- Introduction To Polygons: EdgesDocument33 pagesIntroduction To Polygons: EdgesArko KunduNo ratings yet
- Logic Gates Boolean Algebra: Instructor: Afroza SultanaDocument44 pagesLogic Gates Boolean Algebra: Instructor: Afroza SultanaSamina Tohfa100% (1)
- Introduction To Control: Dr. Muhammad Aamir Assistant Professor Bahria University IslamabadDocument117 pagesIntroduction To Control: Dr. Muhammad Aamir Assistant Professor Bahria University IslamabadEnGr Asad Hayat BanGashNo ratings yet
- Chapter01b - Intro To Digital Logic DesignDocument47 pagesChapter01b - Intro To Digital Logic Designriel_ylayaNo ratings yet
- Lecture5, Root LocusDocument45 pagesLecture5, Root LocusHannah TalindaNo ratings yet
- Gandhinagar Institute of Technology: Control Engineering (2151908Document23 pagesGandhinagar Institute of Technology: Control Engineering (2151908Endryas ZewduNo ratings yet
- Mathematical Modeling 2Document56 pagesMathematical Modeling 2hermelaNo ratings yet
- Module 2 - DDCO 5Document58 pagesModule 2 - DDCO 5Sai SumanNo ratings yet
- Chapter 2 1819 SFGDocument19 pagesChapter 2 1819 SFGHui ShanNo ratings yet
- Polygon & Clipping Algorithm: Unit: IiDocument82 pagesPolygon & Clipping Algorithm: Unit: Iipankajchandre30No ratings yet
- Mod 3Document185 pagesMod 3Sherine SebastianNo ratings yet
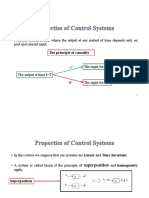
- A Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of CausalityDocument11 pagesA Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of Causalitygamer manNo ratings yet
- LinearAlgebra 2016updatedfromwikiDocument110 pagesLinearAlgebra 2016updatedfromwikiSanchit ChopraNo ratings yet
- DLLec7a NotesDocument5 pagesDLLec7a NotesChintan MandalNo ratings yet
- CHPT 4Document104 pagesCHPT 4ahmad khanNo ratings yet
- CHPT 4Document104 pagesCHPT 4HassnainNo ratings yet
- Introduction To Block DiagramDocument47 pagesIntroduction To Block DiagramAini SalwaNo ratings yet
- Chapter 2 Mathematical Modeling of Dynamic SystemDocument56 pagesChapter 2 Mathematical Modeling of Dynamic SystemAmanuel AsfawNo ratings yet
- ch4 Combinational Logic CircuitsDocument90 pagesch4 Combinational Logic CircuitsMinh Mẫn NguyễnNo ratings yet
- Feedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsDocument30 pagesFeedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsZaheer AhamedNo ratings yet
- Introduction To Linear Algebra: Mark Goldman Emily MackeviciusDocument110 pagesIntroduction To Linear Algebra: Mark Goldman Emily MackeviciusRey Marion CabagNo ratings yet
- Lecture 4 Mathematical Modelling of Transfer Functions (Autosaved)Document19 pagesLecture 4 Mathematical Modelling of Transfer Functions (Autosaved)Kabo MphanyaneNo ratings yet
- MEC522 Chapter 2 - StudentDocument60 pagesMEC522 Chapter 2 - Studentazim khanafiahNo ratings yet
- Comm. Sys. Lect. 8Document36 pagesComm. Sys. Lect. 8sulllNo ratings yet
- A Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of CausalityDocument11 pagesA Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of Causalitygamer manNo ratings yet
- Mac Design Copy1Document9 pagesMac Design Copy1gamer manNo ratings yet
- Helical GearsDocument1 pageHelical Gearsgamer manNo ratings yet
- Belt DriversDocument7 pagesBelt Driversgamer manNo ratings yet
- EN A1S68AD User's ManualDocument48 pagesEN A1S68AD User's ManualAteş GökhanNo ratings yet
- MCM 3320 Connections: Schematic Signal NameDocument3 pagesMCM 3320 Connections: Schematic Signal NameRogério LovattoNo ratings yet
- DSA Computer Lab ManualDocument132 pagesDSA Computer Lab ManualWardaddyNo ratings yet
- Question 1:-Answer True or False For The Following StatementsDocument5 pagesQuestion 1:-Answer True or False For The Following StatementsMony JosephNo ratings yet
- Brian Kernighan and Dennis Ritchie - The C Programming Language-Prentice Hall PTR (1988)Document289 pagesBrian Kernighan and Dennis Ritchie - The C Programming Language-Prentice Hall PTR (1988)AjdernizNo ratings yet
- Autoencoders - PresentationDocument18 pagesAutoencoders - PresentationPhenil BuchNo ratings yet
- UntitledDocument300 pagesUntitledPablo Matias Guillerme AcostaNo ratings yet
- Daewoo Express COD Home Delivery - API Integration Guide - Version 1.3-1Document16 pagesDaewoo Express COD Home Delivery - API Integration Guide - Version 1.3-1Zaheer AbbasNo ratings yet
- Unknown Edits Plug-InsDocument3 pagesUnknown Edits Plug-Insddfvbfves esvsvefesfvNo ratings yet
- JWTDocument85 pagesJWTJos JacksonNo ratings yet
- 1.1 - Types of ComputersDocument2 pages1.1 - Types of ComputersVarun DeshlahraNo ratings yet
- Hao-Ran Lin, Bing-Yuan Cao, Yun-Zhang Liao (Auth.) - Fuzzy Sets Theory Preliminary - Can A Washing Machine Think - Springer International Publishing (2018)Document170 pagesHao-Ran Lin, Bing-Yuan Cao, Yun-Zhang Liao (Auth.) - Fuzzy Sets Theory Preliminary - Can A Washing Machine Think - Springer International Publishing (2018)gagah100% (2)
- Quiles Jonathan Hci2 Activity1Document3 pagesQuiles Jonathan Hci2 Activity1Jonathan Quiles100% (1)
- BT05 InstructionDocument15 pagesBT05 InstructionHorace RoyalNo ratings yet
- Java Laboratory Activity For JavaFX ProgramDocument33 pagesJava Laboratory Activity For JavaFX ProgramMilo PerezNo ratings yet
- Hpe Access Points: Your LogoDocument1 pageHpe Access Points: Your LogoNhan PhanNo ratings yet
- ORACLE SQL, PL - SQL - Handling BULK EXCEPTIONDocument3 pagesORACLE SQL, PL - SQL - Handling BULK EXCEPTIONRahul JhaNo ratings yet
- InRouter615-S PRDT Spec V2.8 Nov. 2021 InHand Networks 2Document4 pagesInRouter615-S PRDT Spec V2.8 Nov. 2021 InHand Networks 2laap85No ratings yet
- Congestion Control PPT 22Document18 pagesCongestion Control PPT 22ARPIT YADAVNo ratings yet
- Tekla User Assistance - Share A Model in Tekla Model Sharing - 2021-05-04Document2 pagesTekla User Assistance - Share A Model in Tekla Model Sharing - 2021-05-04Levi MartonNo ratings yet
- Theory and Its Applications: Evolutionary Algorithms and OptimizationDocument113 pagesTheory and Its Applications: Evolutionary Algorithms and OptimizationMoshira EssamNo ratings yet
- Chapter 4 (Cont.) : Real Number RepresentationsDocument18 pagesChapter 4 (Cont.) : Real Number Representationshassan IQNo ratings yet
- N2-WMS: PT Sutrem Indo AksataDocument12 pagesN2-WMS: PT Sutrem Indo AksataNurhidayatNo ratings yet
- BTEC - Assignment Brief Unit 22Document4 pagesBTEC - Assignment Brief Unit 22Samuel GantaNo ratings yet
- Question: Explain Context SwitchingDocument10 pagesQuestion: Explain Context SwitchingpathakpranavNo ratings yet
- 2D ArrayDocument38 pages2D Arraymaisam abbasNo ratings yet
- Installation Technician: Computing and PeripheralsDocument10 pagesInstallation Technician: Computing and Peripheralsanshuman singhNo ratings yet
- Product Guide: Clipsal C-BusDocument76 pagesProduct Guide: Clipsal C-BusGokul KrishnanNo ratings yet
- Balancing and Attitude Control of Double and Triple Inverted PendulumsDocument29 pagesBalancing and Attitude Control of Double and Triple Inverted PendulumsSantiagoo4life AliNo ratings yet
- Massive MIMO (FDD) (eRAN15.1 - 04)Document104 pagesMassive MIMO (FDD) (eRAN15.1 - 04)Umar MiskiNo ratings yet