You might also like
- Topics Included: Introduction To Stepper Motors & Rotation Sequences Interfacing and Isolating Circuitry Industrial ApplicationsDocument20 pagesTopics Included: Introduction To Stepper Motors & Rotation Sequences Interfacing and Isolating Circuitry Industrial ApplicationsGA16DETNo ratings yet
- 8051 Lab Stepper Motor InterfacingDocument5 pages8051 Lab Stepper Motor InterfacingGirish ChapleNo ratings yet
- Stepper Motor Controller Using 8051Document37 pagesStepper Motor Controller Using 8051gutzz0079197100% (2)
- Stepper MotorDocument6 pagesStepper MotorSiddharth MishraNo ratings yet
- Stepper Motor Interfacing With 8051 MCDocument3 pagesStepper Motor Interfacing With 8051 MCdishantgoel2019No ratings yet
- Stepper MotorDocument4 pagesStepper Motor1020-Santhosh kumar. JNo ratings yet
- MicroDocument11 pagesMicroZac AndersonNo ratings yet
- Stepper MotorsDocument41 pagesStepper MotorssssdaitNo ratings yet
- 5.1 Speed Control DC Motor Using PWMDocument3 pages5.1 Speed Control DC Motor Using PWMkrishnaNo ratings yet
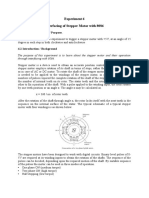
- Experiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / PurposeDocument4 pagesExperiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / Purposepraveenembd1No ratings yet
- Stpper MotorDocument18 pagesStpper Motors.jyotshna100% (1)
- Stepper MotorDocument15 pagesStepper MotorsharadaNo ratings yet
- Experiment 8 Synchronous Motor - Part IDocument13 pagesExperiment 8 Synchronous Motor - Part IRoanaqul Islam PracchoNo ratings yet
- Stepper MotorDocument9 pagesStepper MotorHasan Mahmood100% (1)
- DTC PPTDocument17 pagesDTC PPTmanoranjanottaNo ratings yet
- Control Exp 1 Student ManualDocument5 pagesControl Exp 1 Student ManualMohammad Bony IsrailNo ratings yet
- Ovi 5Document6 pagesOvi 5Naimur Asif BornoNo ratings yet
- Univers'Ity of Science and Technology Bannu: Group MembersDocument23 pagesUnivers'Ity of Science and Technology Bannu: Group MembersAkmal KhanNo ratings yet
- Final ManualDocument27 pagesFinal ManualKameshSontiNo ratings yet
- Mendoza - Experiment No.14Document3 pagesMendoza - Experiment No.14Aldrin MndzNo ratings yet
- Design of Fuzzy PID Controller For Brushless DC Motor: Research ArticleDocument10 pagesDesign of Fuzzy PID Controller For Brushless DC Motor: Research ArticleadilNo ratings yet
- The Ring CounterDocument4 pagesThe Ring CounterPraveen KumarNo ratings yet
- Ic 7432 (Quad 2-Input or Gates), Ic 7404 (Hex Inverters), Leds, Resister (220 ) - EtcDocument2 pagesIc 7432 (Quad 2-Input or Gates), Ic 7404 (Hex Inverters), Leds, Resister (220 ) - EtcIshtiaque Ahmed TanimNo ratings yet
- ELEG 310L Lab 4 (5179)Document7 pagesELEG 310L Lab 4 (5179)ghaliaNo ratings yet
- Experiment10 DE SH22Document3 pagesExperiment10 DE SH22UNCLE STATIONARYNo ratings yet
- Stepper MotorDocument9 pagesStepper Motorabdoo773719637No ratings yet
- Chapter 1: Further Sequential Logic Systems Synchronous CountersDocument34 pagesChapter 1: Further Sequential Logic Systems Synchronous CountersKKK enNo ratings yet
- Experiment No.:10 Components Required:-: ObjectiveDocument6 pagesExperiment No.:10 Components Required:-: ObjectiveAditi MahendraNo ratings yet
- Experiment 2 SALAZARDocument9 pagesExperiment 2 SALAZARgerand salazarNo ratings yet
- Experiment No. 02: DR D Y Patil School of Engineering & TechnologyDocument3 pagesExperiment No. 02: DR D Y Patil School of Engineering & Technologypradnya sadigaleNo ratings yet
- Experiment No. 02: DR D Y Patil School of Engineering & TechnologyDocument3 pagesExperiment No. 02: DR D Y Patil School of Engineering & Technologypradnya sadigaleNo ratings yet
- Lab 7 PLC With Stepper MotorDocument3 pagesLab 7 PLC With Stepper Motorgedeus8072No ratings yet
- Control Lab 1Document11 pagesControl Lab 1Olerile AnaniaNo ratings yet
- University of Tabuk: Mechanical Engineering DepartmentDocument11 pagesUniversity of Tabuk: Mechanical Engineering DepartmentJoker AzzamNo ratings yet
- Electronic Lab Report App 3-4 20Document4 pagesElectronic Lab Report App 3-4 20Selcan KurtNo ratings yet
- Ex1 BrushedDCMotorDocument5 pagesEx1 BrushedDCMotorkewalNo ratings yet
- SY - Synchronous Counter Using Flip FlopsDocument2 pagesSY - Synchronous Counter Using Flip FlopsAbhishek ParmarNo ratings yet
- I. Summary The Main Principle of The Project and Its Circuits Is To Rotate The Stepper Motor Step Wise at ADocument9 pagesI. Summary The Main Principle of The Project and Its Circuits Is To Rotate The Stepper Motor Step Wise at ADr. RAMESH KUMAR. SNo ratings yet
- Lab 1Document19 pagesLab 1dasdasdNo ratings yet
- Ex 04 (Ra2111003010611)Document16 pagesEx 04 (Ra2111003010611)shubhamNo ratings yet
- Edc 21bee0321Document16 pagesEdc 21bee0321lakshit.choudhary2021No ratings yet
- Name: Izaan Ahmed Khan STD ID: FA19-BSCS-0049 COURSE: DLD Theory Assignment # 03Document10 pagesName: Izaan Ahmed Khan STD ID: FA19-BSCS-0049 COURSE: DLD Theory Assignment # 03Izaan Ahmed KhanNo ratings yet
- DLD Lab Report #10Document16 pagesDLD Lab Report #10waleedNo ratings yet
- PLC-controlled Stepper Motor Drive For NC PositionDocument10 pagesPLC-controlled Stepper Motor Drive For NC PositiondeoarshiNo ratings yet
- Experiment - 9 - Stepper MotorDocument5 pagesExperiment - 9 - Stepper MotorABHISHEK SHARMANo ratings yet
- A Study of Sensor Less Control of Induction Motor at Zero Speed Utilizing High Frequency Voltage InjectionDocument11 pagesA Study of Sensor Less Control of Induction Motor at Zero Speed Utilizing High Frequency Voltage Injectionsajs201No ratings yet
- EC2700 LAB: Experiments Iii-VDocument12 pagesEC2700 LAB: Experiments Iii-VS GNo ratings yet
- 3 Bit Synchronous Up CounterDocument15 pages3 Bit Synchronous Up CounterMaruf MorshedNo ratings yet
- Ex2 BrushlessDCMotorDocument8 pagesEx2 BrushlessDCMotorkewalNo ratings yet
- Zero-Crossing Breaker Vs Pre-Insertion ResistorDocument11 pagesZero-Crossing Breaker Vs Pre-Insertion Resistorabhi120783No ratings yet
- Me2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDocument9 pagesMe2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDeepak RainaNo ratings yet
- Machine - Lab Manual Merged PDFDocument14 pagesMachine - Lab Manual Merged PDFMubin LikhonNo ratings yet
- Physics ProjectDocument14 pagesPhysics ProjectvibhorNo ratings yet
- Digital Electronics Circuits: Experiment: 9Document4 pagesDigital Electronics Circuits: Experiment: 9movabNo ratings yet
- Motors in Industrial Applications: Auzani Jidin Power Electronics & Drives Dept. FKE KUTKMDocument13 pagesMotors in Industrial Applications: Auzani Jidin Power Electronics & Drives Dept. FKE KUTKMSyahrul Hisham MohamadNo ratings yet
- Experiment 8: Counting Circuits: (Assignment)Document3 pagesExperiment 8: Counting Circuits: (Assignment)AL Asmr YamakNo ratings yet
- Controlling Stepper Motor: Experiment #4Document9 pagesControlling Stepper Motor: Experiment #4Asaad HalayqaNo ratings yet
- Exp 7,8Document4 pagesExp 7,8Ashwini KothavaleNo ratings yet
- Exp 8Document5 pagesExp 8Ashwini KothavaleNo ratings yet
- Exp 6Document5 pagesExp 6Ashwini KothavaleNo ratings yet
- Exp 6Document2 pagesExp 6Ashwini KothavaleNo ratings yet
- Experiment No.8: Aim: To Study Interfacing of DC Motor With PIC18 Microcontroller Theory: DescriptionDocument5 pagesExperiment No.8: Aim: To Study Interfacing of DC Motor With PIC18 Microcontroller Theory: DescriptionAshwini KothavaleNo ratings yet
- Exp 10Document4 pagesExp 10Ashwini KothavaleNo ratings yet
- Exp 6Document3 pagesExp 6Ashwini KothavaleNo ratings yet
- Exp 5Document3 pagesExp 5Ashwini KothavaleNo ratings yet
- New Microsoft Office Word Document - 1Document1 pageNew Microsoft Office Word Document - 1Ashwini KothavaleNo ratings yet
- Exp 3Document5 pagesExp 3Ashwini KothavaleNo ratings yet
- Exp 2Document6 pagesExp 2Ashwini KothavaleNo ratings yet
- UnpackDocument1 pageUnpackAshwini KothavaleNo ratings yet
- Exp 1Document7 pagesExp 1Ashwini KothavaleNo ratings yet
- Γ = 1 then Γ Γ = 1: L in T OUTDocument1 pageΓ = 1 then Γ Γ = 1: L in T OUTAshwini KothavaleNo ratings yet
- Module2 RFDocument3 pagesModule2 RFAshwini KothavaleNo ratings yet
- CH 02Document28 pagesCH 02Ashwini KothavaleNo ratings yet
- Course Objective: To Design Microwave AmplifierDocument3 pagesCourse Objective: To Design Microwave AmplifierAshwini KothavaleNo ratings yet