You might also like
- BQ 900 User ManualDocument18 pagesBQ 900 User ManualFelipe Alberto Naranjo HerreraNo ratings yet
- RME30002 Control and Automation AssignmentDocument2 pagesRME30002 Control and Automation AssignmentIrtiza IshrakNo ratings yet
- Modeling, Simulation and Control of A Robotic ArmDocument7 pagesModeling, Simulation and Control of A Robotic ArmaseptaNo ratings yet
- Numerical Sheet Control SystemsDocument20 pagesNumerical Sheet Control SystemsKAMARAJU SAI VAMSHINo ratings yet
- Tutorial 6Document3 pagesTutorial 6Gaurav ANo ratings yet
- ACS 2024S1 Assn1Document5 pagesACS 2024S1 Assn11dmsrufNo ratings yet
- R.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question BankDocument6 pagesR.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question Bankaarthir88No ratings yet
- Jntua University Previous Question Papers: Dept., of E.C.E, RCEWDocument25 pagesJntua University Previous Question Papers: Dept., of E.C.E, RCEWpala abishayNo ratings yet
- Control 290922 ExamDocument2 pagesControl 290922 ExamOlaniran Matthew OlawaleNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.HOD ECE KNCETNo ratings yet
- Eel305 - Sep - 2021 - DR - Krishnama Raju SuraparajuDocument2 pagesEel305 - Sep - 2021 - DR - Krishnama Raju SuraparajuAtharva100% (1)
- MCT Question BankDocument5 pagesMCT Question BankKalamchety Ravikumar SrinivasaNo ratings yet
- rr321303 Advanced Control SystemsDocument8 pagesrr321303 Advanced Control SystemsSRINIVASA RAO GANTANo ratings yet
- Rr411005 Digital Control SystemsDocument8 pagesRr411005 Digital Control SystemsSrinivasa Rao GNo ratings yet
- II B. Tech II Semester Regular Examinations, November - 2018 Control SystemsDocument2 pagesII B. Tech II Semester Regular Examinations, November - 2018 Control SystemsSubhakar DasariNo ratings yet
- CS Set1 ESEDocument2 pagesCS Set1 ESEajinkya bhagatNo ratings yet
- Control System - 1 PYQsDocument7 pagesControl System - 1 PYQsAbhishekNo ratings yet
- Control SystemsDocument8 pagesControl Systemsvasantha_btechNo ratings yet
- R1622042112018 PDFDocument2 pagesR1622042112018 PDFDivya SeepanaNo ratings yet
- II B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsDocument8 pagesII B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsViswa ChaitanyaNo ratings yet
- Control Systems Question Paper 2021 Calcutta University BTech EEDocument3 pagesControl Systems Question Paper 2021 Calcutta University BTech EEAkash RoyNo ratings yet
- Assignment 1Document4 pagesAssignment 1Utkarsh AryaNo ratings yet
- Control SystemsDocument8 pagesControl SystemsammukeeruNo ratings yet
- Modeling, Simulation and Control of A Robotic Arm PDFDocument7 pagesModeling, Simulation and Control of A Robotic Arm PDFshivaramreddyNo ratings yet
- III B. Tech I Semester Regular/Supplementary Examinations, October/November - 2016 Control SystemsDocument8 pagesIII B. Tech I Semester Regular/Supplementary Examinations, October/November - 2016 Control SystemsPUDI HAREESHNo ratings yet
- Set A Roll 1-16Document2 pagesSet A Roll 1-16jagat bhusalNo ratings yet
- Assignment 30%Document2 pagesAssignment 30%yisakabera123No ratings yet
- Control System Assignment - 2024Document2 pagesControl System Assignment - 2024Sanjana NetamNo ratings yet
- r05320803 - Process Dynamics & ControlDocument7 pagesr05320803 - Process Dynamics & ControlSRINIVASA RAO GANTANo ratings yet
- VNR Vignana Jyothi Institute of Engineering and TechnologyDocument2 pagesVNR Vignana Jyothi Institute of Engineering and TechnologyNamaswini SureshNo ratings yet
- P-Sheet 02 Time ResponseDocument3 pagesP-Sheet 02 Time Responseahme xxxNo ratings yet
- VI Sem ECEDocument12 pagesVI Sem ECESenthil Kumar KrishnanNo ratings yet
- Answer All Questions: 1 (See Fig.1)Document1 pageAnswer All Questions: 1 (See Fig.1)Study MaxNo ratings yet
- CS Ii 291121Document2 pagesCS Ii 2911214141 Abdul GaniNo ratings yet
- Linear Control Theory (MTE 2203) RCSDocument4 pagesLinear Control Theory (MTE 2203) RCSMeghaNo ratings yet
- Svcet: B.E"/B.Tech. Degree Examination, November/December 2005Document3 pagesSvcet: B.E"/B.Tech. Degree Examination, November/December 2005lllllllllllNo ratings yet
- PDC End Sem VI Sem.Document3 pagesPDC End Sem VI Sem.Hari JainNo ratings yet
- 1087 AcsDocument8 pages1087 AcsNARENDRA NAIK GONAVATHNo ratings yet
- Automatic Control Systems: Section-1Document4 pagesAutomatic Control Systems: Section-11dmsrufNo ratings yet
- Exercise 3 (Transient Response Analysis)Document2 pagesExercise 3 (Transient Response Analysis)Sampreeti MazumdarNo ratings yet
- Lab Rlocus+bodeDocument1 pageLab Rlocus+bodeYasin KaraahmetoğluNo ratings yet
- Control Exercise Sheets 2021Document13 pagesControl Exercise Sheets 2021周暐凱No ratings yet
- FE - Sample 2 (With Answers)Document12 pagesFE - Sample 2 (With Answers)tghafiyzafryNo ratings yet
- Control System Question BankDocument12 pagesControl System Question Banksagar R RaoNo ratings yet
- EC 2255 Control SystemsDocument5 pagesEC 2255 Control SystemsselvijeganNo ratings yet
- Control SystemDocument31 pagesControl SystemDeepak ThapaNo ratings yet
- School of Engineering, Rmit UniversityDocument3 pagesSchool of Engineering, Rmit UniversityDhavalRavalNo ratings yet
- r05322201 Digital and Optimal Control SystemsDocument8 pagesr05322201 Digital and Optimal Control SystemsSRINIVASA RAO GANTANo ratings yet
- Cs Winter 21 GtuDocument3 pagesCs Winter 21 GtuSandeep kumarNo ratings yet
- Control SystemsDocument8 pagesControl SystemsprakashjntuNo ratings yet
- Control System AssignmentDocument13 pagesControl System AssignmentAbhishek Parochi Engineer thisNo ratings yet
- 9A19401 Contol SystemsDocument7 pages9A19401 Contol SystemssivabharathamurthyNo ratings yet
- Acs 2013s1 Assn1Document6 pagesAcs 2013s1 Assn1MiraelNo ratings yet
- Jntu World: R05 Set No. 2Document8 pagesJntu World: R05 Set No. 2Samiullah MohammedNo ratings yet
- Some Past Exam Problems in Control Systems - Part 2Document5 pagesSome Past Exam Problems in Control Systems - Part 2vigneshNo ratings yet
- 5935r09-Digital Control SystemsDocument2 pages5935r09-Digital Control SystemsSaikumar NemalikantiNo ratings yet
- Robust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationFrom EverandRobust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationNo ratings yet
- Exp 3 ElabDocument1 pageExp 3 ElabShruthi reddyNo ratings yet
- Machines Tutorial Sheet #1Document4 pagesMachines Tutorial Sheet #1Shruthi reddyNo ratings yet
- Tutorial Sheet #3Document6 pagesTutorial Sheet #3Shruthi reddyNo ratings yet
- The Last Color ScriptDocument26 pagesThe Last Color ScriptShruthi reddyNo ratings yet
- Indian Institute of Technology Kharagpur: Total Credits. 21Document1 pageIndian Institute of Technology Kharagpur: Total Credits. 21Shruthi reddyNo ratings yet
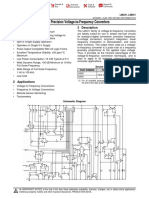
- Lmx31X Precision Voltage-To-Frequency Converters: 1 Features 3 DescriptionDocument24 pagesLmx31X Precision Voltage-To-Frequency Converters: 1 Features 3 DescriptionShruthi reddyNo ratings yet
- Cengage Magnetism and Electromagnetic InductionDocument2 pagesCengage Magnetism and Electromagnetic InductionShruthi reddy0% (1)
- Load Cell: SimulationDocument4 pagesLoad Cell: SimulationShruthi reddyNo ratings yet
- Range Rover Evoque BrochureDocument2 pagesRange Rover Evoque BrochureParantap SinghNo ratings yet
- 10 MW Thermal EnergyDocument3 pages10 MW Thermal EnergyDeepal DhamejaNo ratings yet
- COMPARING ANIMALS - Sentences With Comparatives and SuperlativesDocument4 pagesCOMPARING ANIMALS - Sentences With Comparatives and SuperlativesPauNo ratings yet
- Math, Models and ModalityDocument317 pagesMath, Models and Modalityinajeh100% (1)
- Electro Shema Range Rover 1999onDocument611 pagesElectro Shema Range Rover 1999onАлексей ЛопаткоNo ratings yet
- TiKi TaKa CK Preventive MedicineDocument3 pagesTiKi TaKa CK Preventive MedicinenonsNo ratings yet
- Volume 11Document46 pagesVolume 11planetminerNo ratings yet
- User ManualDocument98 pagesUser ManualGonzalo TapiaNo ratings yet
- Robert S de Ropp The Master GameDocument132 pagesRobert S de Ropp The Master GameConnor Woolf100% (1)
- Astm e 1044 - 96Document2 pagesAstm e 1044 - 96MarceloNo ratings yet
- Tablero Aveo 1.6LTS. 2Document1 pageTablero Aveo 1.6LTS. 2Ricardo Reyes HernándezNo ratings yet
- DIM Document Primescan Clinical Studies Overview ENDocument22 pagesDIM Document Primescan Clinical Studies Overview ENrita adhikariNo ratings yet
- CH 7Document41 pagesCH 7api-3761826No ratings yet
- Maschinenpistole 40 (MP40) Submachine GunDocument7 pagesMaschinenpistole 40 (MP40) Submachine Gunblowmeasshole1911No ratings yet
- LH Webcki - De.portal.y423cfjdw5uggth69zst91Document3 pagesLH Webcki - De.portal.y423cfjdw5uggth69zst91Rogerio GoncalvesNo ratings yet
- Camp Lockett HistoryDocument239 pagesCamp Lockett HistoryCAP History Library100% (2)
- PID Tuning Parameter TableDocument1 pagePID Tuning Parameter Tablesteam100deg1658No ratings yet
- IBM TapeDocument11 pagesIBM TapeDaWheng VargasNo ratings yet
- CSSD EvaluationDocument6 pagesCSSD EvaluationFouzia ShariqNo ratings yet
- TransferirDocument15 pagesTransferirigorNo ratings yet
- Digestion and Absorption: Digestive System of HumanDocument4 pagesDigestion and Absorption: Digestive System of HumanrajaijahNo ratings yet
- 2020sep CV CBIS LohDuaneDocument5 pages2020sep CV CBIS LohDuaneLaura ParkaNo ratings yet
- Fle PC Her CatalogDocument71 pagesFle PC Her CatalogAmir IshakNo ratings yet
- Redx LogisticsDocument29 pagesRedx Logisticsbabu chyNo ratings yet
- 11 SubstationDocument13 pages11 SubstationYogesh BadheNo ratings yet
- Nistir4758 PDFDocument434 pagesNistir4758 PDFAnonymous oUoJ4A8x100% (1)
- Bracing Wall Design: (In Order of Preference)Document1 pageBracing Wall Design: (In Order of Preference)NhuVan NguyenNo ratings yet
- Yale Controllers Etacc Us 139 Etacc 09 2020Document22 pagesYale Controllers Etacc Us 139 Etacc 09 2020jillweber050785wcp100% (125)
- Olimpiadas Rusas - IDocument29 pagesOlimpiadas Rusas - IviterickNo ratings yet