You might also like
- Sociology Unit 1 NotesDocument40 pagesSociology Unit 1 NotesDarien M Walcott94% (53)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- CAP 2 Essentials of Chemical Reaction Engineering-EDGARDocument9 pagesCAP 2 Essentials of Chemical Reaction Engineering-EDGARAnneLiithaAlfonsoBocarandoNo ratings yet
- SCARA Robot KinematicsDocument5 pagesSCARA Robot KinematicsPrasanth Kurapati100% (3)
- PresIMSD2016 PDFDocument18 pagesPresIMSD2016 PDFJose RissoNo ratings yet
- Neizraziti Autonomno Upravljanje Automobilom (3 DOF Model)Document8 pagesNeizraziti Autonomno Upravljanje Automobilom (3 DOF Model)beremiz009No ratings yet
- Multi Objective Synthesis of Vehicle SemDocument7 pagesMulti Objective Synthesis of Vehicle SemPeter MüllerNo ratings yet
- Simulating Track/Sprocket and Track/Wheel/Terrain Contact in Tracked VehiclesDocument30 pagesSimulating Track/Sprocket and Track/Wheel/Terrain Contact in Tracked VehiclesIroshana Thushara KiriwattuduwaNo ratings yet
- Simulating Track/Sprocket and Track/Wheel/Terrain Contact in Tracked VehiclesDocument30 pagesSimulating Track/Sprocket and Track/Wheel/Terrain Contact in Tracked VehiclesIroshana Thushara KiriwattuduwaNo ratings yet
- The Development of The Autonomous Tractor With Steering Controller Applied by Optimal ControlDocument7 pagesThe Development of The Autonomous Tractor With Steering Controller Applied by Optimal ControlXuefeng ShenNo ratings yet
- RajbhanDocument2 pagesRajbhanSatendra TiwariNo ratings yet
- 574 AaDocument2 pages574 Aapranay kumarNo ratings yet
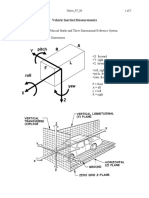
- Y A Pitch L R: Vehicle Inertial MeasurementsDocument5 pagesY A Pitch L R: Vehicle Inertial MeasurementsEducation formeNo ratings yet
- General InformationDocument33 pagesGeneral InformationPhan VănNo ratings yet
- Mec-001 Jun-2009Document12 pagesMec-001 Jun-2009tanu100% (1)
- Vehicle Dynamics Theory: October 2005 Andrew MuirDocument126 pagesVehicle Dynamics Theory: October 2005 Andrew MuirSrinivasarao YenigallaNo ratings yet
- Vehicle Dynamics TheoryAJM PDFDocument126 pagesVehicle Dynamics TheoryAJM PDFSrinivasarao YenigallaNo ratings yet
- Forecast Filter of KalmanDocument12 pagesForecast Filter of KalmanJorge LunaNo ratings yet
- 42par Curve and Spot Curve V3Document29 pages42par Curve and Spot Curve V3Rashid MalikNo ratings yet
- Power Requirements of A VehicleDocument32 pagesPower Requirements of A VehicleAvinashRaiNo ratings yet
- Dynamic Analysis of The Train-Bridge Interaction: An Accurate and Efficient Numerical MethodDocument12 pagesDynamic Analysis of The Train-Bridge Interaction: An Accurate and Efficient Numerical MethodIONUT RACANELNo ratings yet
- DV - 04 - Vehicles Equation of MotionDocument12 pagesDV - 04 - Vehicles Equation of MotionNeerajNo ratings yet
- Electricity BillDocument2 pagesElectricity Billabmbodyshop.bmplNo ratings yet
- Term-End Examination December, 2012 Mec-001: Micro Economic AnalysisDocument12 pagesTerm-End Examination December, 2012 Mec-001: Micro Economic AnalysistanuNo ratings yet
- Bảng tra nội lựcDocument8 pagesBảng tra nội lựcHuy DiệpNo ratings yet
- MASILANG-Module 2 Activity No. 4Document3 pagesMASILANG-Module 2 Activity No. 4PHILIPANTHONY MASILANGNo ratings yet
- Assignment 4 Lunar Lander Solution: Specification ValueDocument13 pagesAssignment 4 Lunar Lander Solution: Specification ValueirqoviNo ratings yet
- Rally Dynamics BlogDocument12 pagesRally Dynamics BlogJose Ramon Bueno AlvarezNo ratings yet
- Easy LoadsheetDocument1 pageEasy LoadsheetSergey D100% (1)
- Megaflex BeltsDocument50 pagesMegaflex BeltsJosé Luiz NovelinoNo ratings yet
- T T TLR T T (Fir I FL 1M Ftiffi: Sa 6ffi Ig FTQ FF Sffir Ffiq TR T RTT 6rd OriDocument11 pagesT T TLR T T (Fir I FL 1M Ftiffi: Sa 6ffi Ig FTQ FF Sffir Ffiq TR T RTT 6rd OriGauravChoudharyNo ratings yet
- Punjabi University Recruitment Notification December 2021Document3 pagesPunjabi University Recruitment Notification December 2021AMANPREET KaurNo ratings yet
- Signals and Systems 08 TL Section II Class Test 2: F X F YDocument1 pageSignals and Systems 08 TL Section II Class Test 2: F X F YFaizan MateenNo ratings yet
- Phys PDFDocument5 pagesPhys PDFmounam maitiNo ratings yet
- ZF Vector Drive ConceptsDocument48 pagesZF Vector Drive ConceptsConcept of ReasoningNo ratings yet
- Hrs E" - Tri: (WithoutDocument4 pagesHrs E" - Tri: (WithoutyatiNo ratings yet
- Spa C4Document18 pagesSpa C4manuelNo ratings yet
- Engr. Dilruba SiddiqiDocument25 pagesEngr. Dilruba SiddiqiDanish NadeemNo ratings yet
- D Ro Tie Hitdonnebwras Wnro 1et : PnenpntoibieijpovsDocument2 pagesD Ro Tie Hitdonnebwras Wnro 1et : PnenpntoibieijpovsKasama WONGKEIMNo ratings yet
- ICERA2020Document11 pagesICERA2020Lưu Thành PhongNo ratings yet
- 2type and Number SynthesisDocument9 pages2type and Number Synthesis張舜傑No ratings yet
- Moving Wheel Loads AnalysisDocument6 pagesMoving Wheel Loads AnalysisAdi SetiawanNo ratings yet
- Midterm-F2019 Rev0, WithformulaeDocument10 pagesMidterm-F2019 Rev0, WithformulaeRayNo ratings yet
- LPG For SchoolDocument2 pagesLPG For Schoolmahibhai2401No ratings yet
- Aits 2223 FT Viii Jeea Paper 1 SolDocument14 pagesAits 2223 FT Viii Jeea Paper 1 SolREBBAPRAGADA KARTHEEKNo ratings yet
- Robust Replication of Volatility DerivativesDocument35 pagesRobust Replication of Volatility DerivativesGlenden KhewNo ratings yet
- DTSP ExtcDocument15 pagesDTSP ExtcPurva KNo ratings yet
- Instrucciones y OPCODEDocument11 pagesInstrucciones y OPCODELuis J Zuluaga BetancurNo ratings yet
- An Improved Magic Formula/Swift Tyre Model That Can Handle Inflation Pressure ChangesDocument14 pagesAn Improved Magic Formula/Swift Tyre Model That Can Handle Inflation Pressure ChangesmilasinovicaNo ratings yet
- Absent N l1,,t T: TV, WTDocument1 pageAbsent N l1,,t T: TV, WTNickoNo ratings yet
- Fractional Fourier Transform: A Survey: August 2012Document8 pagesFractional Fourier Transform: A Survey: August 2012carlosj114No ratings yet
- Punjab Pre Primary Teacher NTT Recruitment 2021Document7 pagesPunjab Pre Primary Teacher NTT Recruitment 2021Rajesh K KumarNo ratings yet
- Al Ghurair University Assignment 016 2 Assign2 StatDocument7 pagesAl Ghurair University Assignment 016 2 Assign2 Statosama hasanNo ratings yet
- Son 09-09Document1 pageSon 09-09Đăng NhậtNo ratings yet
- Trumpeter T-62 SpruesDocument12 pagesTrumpeter T-62 SpruesFordM4A3No ratings yet
- Sección 2: Nicolás Vercellino KDocument18 pagesSección 2: Nicolás Vercellino KnicolasNo ratings yet
- 6 Equivalent Force Systems in 2D and 3D Final1Document28 pages6 Equivalent Force Systems in 2D and 3D Final1Reymart LunarioNo ratings yet
- BusinessCycleDynamicsUnderStickyInf PreviewDocument6 pagesBusinessCycleDynamicsUnderStickyInf PreviewdfdfffNo ratings yet
- Structurepoint - Spcolumn V5.10 (TM) - Licensed To: Prasetyo, Asa Graha. License Id: - XXXXXDocument1 pageStructurepoint - Spcolumn V5.10 (TM) - Licensed To: Prasetyo, Asa Graha. License Id: - XXXXXDwi PrasetyoNo ratings yet
- Sistemes Propolsius D'aeronaus: Marc Maym o GarridoDocument19 pagesSistemes Propolsius D'aeronaus: Marc Maym o GarridomanuelNo ratings yet
- 1 I I6il Iffii Ffiq Fffi T-: - RqfiDocument4 pages1 I I6il Iffii Ffiq Fffi T-: - RqfidineshNo ratings yet
- Spaghetti Sine Curve ActivityDocument2 pagesSpaghetti Sine Curve Activitygirisha123No ratings yet
- RSA and ECC Thesis PDFDocument21 pagesRSA and ECC Thesis PDFHarpreet SinghNo ratings yet
- AAEDR-A-008 Rev 7 Automatic Block ValveDocument5 pagesAAEDR-A-008 Rev 7 Automatic Block ValveJose G LopezNo ratings yet
- Transformative ITS in Malaysia's Transport Sector: Datuk Ir Dr. LEONG Siew Mun ITS MalaysiaDocument22 pagesTransformative ITS in Malaysia's Transport Sector: Datuk Ir Dr. LEONG Siew Mun ITS MalaysiaSyǝd KhairiNo ratings yet
- Java ProgramsDocument30 pagesJava ProgramsashwanileoNo ratings yet
- BA Quasar-II UPS10-40 kVA GBDocument54 pagesBA Quasar-II UPS10-40 kVA GBa.elwahabNo ratings yet
- Microprocessor: Viva QuestionsDocument6 pagesMicroprocessor: Viva QuestionshrrameshhrNo ratings yet
- Series 5000 Texsteam PDFDocument24 pagesSeries 5000 Texsteam PDFwhisnu hyerlambang100% (2)
- BCA 1styear Second SemDocument9 pagesBCA 1styear Second SemDRANZER101No ratings yet
- Fischer - Schellings Lehre PDFDocument874 pagesFischer - Schellings Lehre PDFJustin HorkyNo ratings yet
- Brochure - Rigid Renold Page 40 PDFDocument76 pagesBrochure - Rigid Renold Page 40 PDFCarlos Gallardo LagosNo ratings yet
- Case 1 - Steel Works - Group 3Document9 pagesCase 1 - Steel Works - Group 3Rahul KumarNo ratings yet
- Action ResearchDocument8 pagesAction ResearchCaroline VillarinNo ratings yet
- Indian Structural Hand BookDocument209 pagesIndian Structural Hand BookNaliniRanjanMuduliNo ratings yet
- HSS Drill Speeds and FeedsDocument1 pageHSS Drill Speeds and FeedsfinndusNo ratings yet
- C-10564 Instruction EF2 DIN Technical ManualDocument34 pagesC-10564 Instruction EF2 DIN Technical ManualJoão Lêdo da FonsecaNo ratings yet
- Hans Eysenck's Biologically Based Factor TheoryDocument17 pagesHans Eysenck's Biologically Based Factor TheoryJoanna Marie SillanoNo ratings yet
- Advantages of Steel Sleeves Over Composite Materials For Pipeline RepairDocument4 pagesAdvantages of Steel Sleeves Over Composite Materials For Pipeline RepairAlzaki AbdullahNo ratings yet
- Introduction, Syllabus & Admission: Heading DetailsDocument3 pagesIntroduction, Syllabus & Admission: Heading Detailsapi-248534913No ratings yet
- Sterilization of WaterDocument21 pagesSterilization of WaterYASHWIN RAMESHNo ratings yet
- EF Wire Harness Instructions2.0Document2 pagesEF Wire Harness Instructions2.0Hybrid Racing100% (1)
- L22 Mstrip3Document12 pagesL22 Mstrip3Surbhi SharmaNo ratings yet
- 7d-Word SheetDocument6 pages7d-Word SheetKwan Ye LinNo ratings yet
- COBIT 2019 Design Guide Res Eng 1218Document150 pagesCOBIT 2019 Design Guide Res Eng 1218JoaoNo ratings yet
- Academic Classroom Behavior Record (Acbr) : Experimental Evaluation of The Tools of The Mind Pre-K CurriculumDocument1 pageAcademic Classroom Behavior Record (Acbr) : Experimental Evaluation of The Tools of The Mind Pre-K CurriculumAsmaa AhmedNo ratings yet
- Emmalie Ford - STAAR REVIEW PACKETDocument30 pagesEmmalie Ford - STAAR REVIEW PACKETemmaliefordclarkNo ratings yet
- TENTATIVE BOM - Amitriptyline 12.5 MG and Chlordiazepoxide 5 MG TabletDocument2 pagesTENTATIVE BOM - Amitriptyline 12.5 MG and Chlordiazepoxide 5 MG TabletGaFf ArNo ratings yet
- Budgeting and Spending BehaviorDocument16 pagesBudgeting and Spending BehaviorRicardo Tablada100% (1)
- Soal Midtest - Okt-20091 PDFDocument1 pageSoal Midtest - Okt-20091 PDFOtta Gaima SembiringNo ratings yet