You might also like
- CoreJava Ratan CompleteMarerial PDFDocument398 pagesCoreJava Ratan CompleteMarerial PDFSivaShankar100% (7)
- GDPR Project PlanDocument15 pagesGDPR Project PlanMav Dil100% (1)
- Services OperationDocument29 pagesServices OperationSatish RAjNo ratings yet
- UNIFI MODULES REVIEW v1.4Document75 pagesUNIFI MODULES REVIEW v1.4samad wokyohNo ratings yet
- Exeter Book - Benjamin Thorpe - 1842Document575 pagesExeter Book - Benjamin Thorpe - 1842Anonymous TNaPN570No ratings yet
- ADMMv9 Requirements and Additional Information FINAL v1 20190418Document338 pagesADMMv9 Requirements and Additional Information FINAL v1 20190418Santosh RaiNo ratings yet
- 07 Basic ROS ProgrammingDocument77 pages07 Basic ROS ProgrammingaDun iDeiNo ratings yet
- Introduction To Opensees-By Nazia FarzanaDocument29 pagesIntroduction To Opensees-By Nazia FarzanaNazia Farzana100% (1)
- IntroductionOpenSees PDFDocument27 pagesIntroductionOpenSees PDFali381No ratings yet
- SCAPS-Solar Cell Capacitance SimulatorDocument18 pagesSCAPS-Solar Cell Capacitance SimulatorSrinithi M 23PHD0053No ratings yet
- Robot Operating SystemDocument19 pagesRobot Operating SystemWaseem HassanNo ratings yet
- Piezoresistive Strain Gauges For Use in Wireless Component Monitoring SystemsDocument19 pagesPiezoresistive Strain Gauges For Use in Wireless Component Monitoring SystemsYash SharmaNo ratings yet
- Comparison of CT Burden of Protection Relay TypesDocument9 pagesComparison of CT Burden of Protection Relay TypesNeelakandan MasilamaniNo ratings yet
- Unit 5Document121 pagesUnit 5savsen6720No ratings yet
- Landahl Quantum ErrorcorDocument58 pagesLandahl Quantum ErrorcorGift Titus MunkombweNo ratings yet
- OpenSees Future Direction 2017Document39 pagesOpenSees Future Direction 2017fariasgarciarojasNo ratings yet
- MOR Outline: - Need For Model Reduction - Steady-State Case (Linear and Nonlinear) - Dynamic Linear CaseDocument11 pagesMOR Outline: - Need For Model Reduction - Steady-State Case (Linear and Nonlinear) - Dynamic Linear CasesorzomNo ratings yet
- Lecture 2: Review of Performance/Cost/Power Metrics and Architectural BasicsDocument73 pagesLecture 2: Review of Performance/Cost/Power Metrics and Architectural BasicsVikas Kr SinghNo ratings yet
- Javascript Developer SyllabusDocument7 pagesJavascript Developer SyllabusRicha PatilNo ratings yet
- Appendix AWN 2Document20 pagesAppendix AWN 2mert gökçeNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451 L14 TimeResp1st 240116 183517Document4 pagesME451 L14 TimeResp1st 240116 183517epe3630No ratings yet
- A2 OpenSeesTCLDocument25 pagesA2 OpenSeesTCLMatías Pino YáñezNo ratings yet
- DDCET New SyllabusDocument4 pagesDDCET New Syllabuspatadiyadarshan50No ratings yet
- RTCOMMDocument35 pagesRTCOMMbinnyjNo ratings yet
- Electrical Measurements & InstrumentationDocument50 pagesElectrical Measurements & InstrumentationBe JohnhNo ratings yet
- Assessing Impact of Demand Response in Emission-Constrained EnvironmentsDocument6 pagesAssessing Impact of Demand Response in Emission-Constrained Environmentslinkin_slayerNo ratings yet
- Johnson Control Building Automation System: by MR - Prasert Sutthiparinyanon Complete Electrical Solutions Co.,LtdDocument14 pagesJohnson Control Building Automation System: by MR - Prasert Sutthiparinyanon Complete Electrical Solutions Co.,Ltdthamer al-salekNo ratings yet
- f4 Yearly Plan Physics)Document26 pagesf4 Yearly Plan Physics)Feli CiaNo ratings yet
- Introduction To Linear Algebra: Mark Goldman Emily MackeviciusDocument110 pagesIntroduction To Linear Algebra: Mark Goldman Emily MackeviciusRey Marion CabagNo ratings yet
- FSK 2024 Practical Manual StudentsDocument64 pagesFSK 2024 Practical Manual Studentsnapnom22No ratings yet
- Radioss Modeling Best PracticesDocument37 pagesRadioss Modeling Best Practiceszacheu35No ratings yet
- 1 s2.0 S0263224120301342 MainDocument12 pages1 s2.0 S0263224120301342 Mainmateo guerra londoñoNo ratings yet
- Module1 Algorithm AnalysisDocument26 pagesModule1 Algorithm AnalysisNIKHIL SOLOMON P URK19CS1045No ratings yet
- ME L19 RootLocusMultiparaDocument4 pagesME L19 RootLocusMultiparaRezkodaNo ratings yet
- Xleratordbpresentation 130429080113 Phpapp02Document28 pagesXleratordbpresentation 130429080113 Phpapp02joaoagrainformaticaNo ratings yet
- LinearAlgebra 2016updatedfromwikiDocument110 pagesLinearAlgebra 2016updatedfromwikiSanchit ChopraNo ratings yet
- Mechanical Transducers: AccelerometersDocument13 pagesMechanical Transducers: Accelerometersvijayamkulkarni86No ratings yet
- Sec Ii D Si UnitsDocument5 pagesSec Ii D Si UnitssilvanopipeNo ratings yet
- Control Systems Course RoadmapDocument5 pagesControl Systems Course RoadmapRezkodaNo ratings yet
- Lecture 1 Big Oh, Omega, ThtaDocument38 pagesLecture 1 Big Oh, Omega, ThtaKaheng ChongNo ratings yet
- List of Physical Quantities - WikipediaDocument13 pagesList of Physical Quantities - WikipediaajmerurrehmanNo ratings yet
- Model Checking: Model Checking Is An Automatic Technique For Verifying Finite StateDocument13 pagesModel Checking: Model Checking Is An Automatic Technique For Verifying Finite Stateshree_xNo ratings yet
- LTE Radio Network Capacity DimensioningDocument34 pagesLTE Radio Network Capacity Dimensioningkarthicksaravanakumar2No ratings yet
- Open Sees WorkshopDocument305 pagesOpen Sees Workshopsatyam100% (1)
- Lecture 1 2122Document46 pagesLecture 1 2122Muhammad Taha ZakaNo ratings yet
- Push-Over Analysis For Seismic Performance Evaluation of RC Frame Structures. Computer ProgramsDocument13 pagesPush-Over Analysis For Seismic Performance Evaluation of RC Frame Structures. Computer ProgramsGegee_6111No ratings yet
- Physics IAS TOPIC 1 EditedDocument23 pagesPhysics IAS TOPIC 1 Editedමේනුක සූවින්දNo ratings yet
- Optimal Transmission Switching Sensitivity Analysis - Richard O'Neill - 2008Document12 pagesOptimal Transmission Switching Sensitivity Analysis - Richard O'Neill - 2008Davi BorattoNo ratings yet
- Design Optimization For Power-Supplying The Nodes of WSNs - Master Thesis Presentation - Ioannis MandourarakisDocument51 pagesDesign Optimization For Power-Supplying The Nodes of WSNs - Master Thesis Presentation - Ioannis MandourarakisIoannis MandourarakisNo ratings yet
- Ee902 NotesDocument58 pagesEe902 Notespim satNo ratings yet
- ʅ M T I T: Nuclear Physics: Study of Nuclear Structure andDocument2 pagesʅ M T I T: Nuclear Physics: Study of Nuclear Structure andLuke SuouNo ratings yet
- The International Systems of Units (SI)Document8 pagesThe International Systems of Units (SI)Manoj EkNo ratings yet
- GIDS2016 SpeakerPresentationDocument23 pagesGIDS2016 SpeakerPresentationmbasu tyNo ratings yet
- Radar 5-TX RadarDocument29 pagesRadar 5-TX RadarAhmedShahNo ratings yet
- Lab 04Document18 pagesLab 04foruseopen29No ratings yet
- AS Physics Summer ProjectDocument22 pagesAS Physics Summer ProjectBrandon LarmondNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Chemical Reaction EngineeringDocument127 pagesChemical Reaction EngineeringRitesh BhattacharyaNo ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Shear Stress Subject: Date Saturday, October 21, 2017 CommentsDocument24 pagesShear Stress Subject: Date Saturday, October 21, 2017 CommentsMateo RoblesNo ratings yet
- ST504 AssignmentDocument21 pagesST504 AssignmentDinesh JangraNo ratings yet
- Design A Positional Errors Correction, For Robot Using Differential Load Cell Transformer Feed BackDocument14 pagesDesign A Positional Errors Correction, For Robot Using Differential Load Cell Transformer Feed BackTJPRC PublicationsNo ratings yet
- Embedded System Weeks 10Document38 pagesEmbedded System Weeks 10Abdulloh AsatullayevNo ratings yet
- 0 2023 강의자료 통합 v2 - 9 (part1) PDFDocument83 pages0 2023 강의자료 통합 v2 - 9 (part1) PDFAbdulloh AsatullayevNo ratings yet
- 2023 Business template (Team - - -) - 복사본Document11 pages2023 Business template (Team - - -) - 복사본Abdulloh AsatullayevNo ratings yet
- Probability and Statistics Final Exam 2021.12.14 Tuesday-TableDocument8 pagesProbability and Statistics Final Exam 2021.12.14 Tuesday-TableAbdulloh AsatullayevNo ratings yet
- Matlab BasicDocument20 pagesMatlab BasicAbdulloh AsatullayevNo ratings yet
- Cos3711 Additional NotesDocument16 pagesCos3711 Additional NotesShaun NevilleNo ratings yet
- Error Message Reference: Oracle® Hyperion PlanningDocument34 pagesError Message Reference: Oracle® Hyperion PlanningVenkata Reddy KalluruNo ratings yet
- University of Engineering & Technology Peshawar Computer Fundamentals Lab Report: 2Document11 pagesUniversity of Engineering & Technology Peshawar Computer Fundamentals Lab Report: 2Ashu DollyNo ratings yet
- Datagiri: Presented 17 November By: Himanshu ShrivastavaDocument17 pagesDatagiri: Presented 17 November By: Himanshu Shrivastavaneeraj12121No ratings yet
- Site Assessment WorksheetDocument5 pagesSite Assessment Worksheetnish_angreNo ratings yet
- EECE6017C - Lab 0 Introduction To Altera Tools and Basic Digital LogicDocument13 pagesEECE6017C - Lab 0 Introduction To Altera Tools and Basic Digital LogicCarlos Morales CarbajalNo ratings yet
- File ListDocument42 pagesFile ListVasiloi RobertNo ratings yet
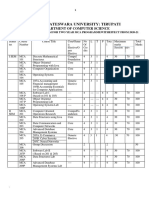
- Sri Venkateswara University: Tirupati: Department of Computer ScienceDocument24 pagesSri Venkateswara University: Tirupati: Department of Computer ScienceANKISETTI BHARATHKUMARNo ratings yet
- Course List - Winter - 23-24Document19 pagesCourse List - Winter - 23-24ayushmaan7484No ratings yet
- Xi31 FP42 Release Notes enDocument133 pagesXi31 FP42 Release Notes enJuliana SanadaNo ratings yet
- Classes and ObjectsDocument13 pagesClasses and ObjectsSUJITHMVNo ratings yet
- OBIEE BMM Layer Design PrinciplesDocument2 pagesOBIEE BMM Layer Design PrinciplesAmar ShirkeNo ratings yet
- A Comparative Study On Text Summarization Methods: AbstractDocument7 pagesA Comparative Study On Text Summarization Methods: AbstractInternational Journal of Engineering and TechniquesNo ratings yet
- MLG 5B Appendix 3 00Document20 pagesMLG 5B Appendix 3 00MeNo ratings yet
- IPD - Active Directory Domain Services Version 2.2Document36 pagesIPD - Active Directory Domain Services Version 2.2Faizal BahruddinNo ratings yet
- Memory Addressing and 8284 PDFDocument35 pagesMemory Addressing and 8284 PDFChazzy TaripeNo ratings yet
- Fiat ImmobilizerDocument7 pagesFiat ImmobilizerGiorgio Mancini100% (3)
- SemanticsDocument5 pagesSemanticsChecen RakimNo ratings yet
- AIS ReportDocument33 pagesAIS ReportFeberly BarituaNo ratings yet
- Optimal Control of Risk Exposure, Reinsurance and Investments For Insurance PortfoliosDocument51 pagesOptimal Control of Risk Exposure, Reinsurance and Investments For Insurance PortfoliospostscriptNo ratings yet
- ISOIEC 27001 Compliance Backgrounder PDFDocument2 pagesISOIEC 27001 Compliance Backgrounder PDFMayra Alejandra Bustos RodriguezNo ratings yet
- Malware 1Document3 pagesMalware 1Bennet KelleyNo ratings yet
- CSE 5G Technology Report PDFDocument42 pagesCSE 5G Technology Report PDFSamarth SnehNo ratings yet
- Saravanan. A.S: Phone: +91 6361506348Document8 pagesSaravanan. A.S: Phone: +91 6361506348saravanankonguNo ratings yet
- BC ICT Performance Standards Quick ScaleDocument1 pageBC ICT Performance Standards Quick ScaletmalloffNo ratings yet
- Q Survey Implementation GuideDocument38 pagesQ Survey Implementation GuideVandana MadhavkumarNo ratings yet