You might also like
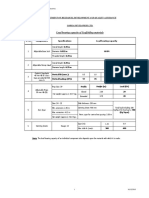
- Scaffolding Load Bearing CapacityDocument1 pageScaffolding Load Bearing CapacityGanga Daran100% (4)
- Costa, António Pedro, Luís Paulo Reis, António Moreira. 2019. (Advances in Intelligent Systems and Computing 861) Computer Supported Qualitative Research - New Trends On Qualitative Research-SpringerDocument330 pagesCosta, António Pedro, Luís Paulo Reis, António Moreira. 2019. (Advances in Intelligent Systems and Computing 861) Computer Supported Qualitative Research - New Trends On Qualitative Research-SpringerClarisse ReinfildNo ratings yet
- Kepler's Celestial MusicDocument24 pagesKepler's Celestial Musicfranciscoacfreitas100% (1)
- Group-5-Chapter-IV - Abstract, Summary, Conclusion, and ReccomendationDocument38 pagesGroup-5-Chapter-IV - Abstract, Summary, Conclusion, and Reccomendationjelian castroNo ratings yet
- Understanding the Interdisciplinary Field of Cognitive ScienceDocument10 pagesUnderstanding the Interdisciplinary Field of Cognitive ScienceDoris TănaseNo ratings yet
- Ethics and Social ResponsibilityDocument16 pagesEthics and Social Responsibilitypallavi50% (2)
- Pega Intelligent BPM The Next Wave For Customer Centric Business Applicationskhoshafian11 140809041228 Phpapp02 PDFDocument215 pagesPega Intelligent BPM The Next Wave For Customer Centric Business Applicationskhoshafian11 140809041228 Phpapp02 PDFFred Marcus100% (1)
- Cat4 Test Practice For Year 11 Level GDocument6 pagesCat4 Test Practice For Year 11 Level GJoel OkohNo ratings yet
- Assignment 2, EDAP01: 1 StatementDocument3 pagesAssignment 2, EDAP01: 1 StatementAxel RosenqvistNo ratings yet
- Note14 - Validacao PDFDocument8 pagesNote14 - Validacao PDFRafael AlvesNo ratings yet
- 2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsDocument10 pages2006 Use of The Interacting Multiple Model Algorithm With Multiple SensorsMohamed Hechmi JERIDINo ratings yet
- Aau9354 SMDocument22 pagesAau9354 SMYilei zhangNo ratings yet
- Chapter-4Document14 pagesChapter-4Min Nyi That TantNo ratings yet
- The Implementation of A Hidden Markov MoDocument14 pagesThe Implementation of A Hidden Markov MoFito RhNo ratings yet
- 1998 KLD Sampling Adaptive Particle FiltersDocument8 pages1998 KLD Sampling Adaptive Particle Filterssboy888No ratings yet
- COMP1901 Research ProjectDocument12 pagesCOMP1901 Research Projecttaiiq zhouNo ratings yet
- مقدمة محاكاة الشبكاتDocument9 pagesمقدمة محاكاة الشبكاتSaif ShubbarNo ratings yet
- Introduction To Mean ShiftDocument13 pagesIntroduction To Mean Shifttiendat_20791No ratings yet
- Simulation and ModellingDocument10 pagesSimulation and ModellingEr Aamir Maqbool25% (4)
- Memoria 4Document7 pagesMemoria 4JAIMEPOSNo ratings yet
- Comparison of Metamodel Approaches for Robust Design OptimizationDocument14 pagesComparison of Metamodel Approaches for Robust Design OptimizationRajib ChowdhuryNo ratings yet
- Scimakelatex 32961 Peter+Rabbit Gumby Carlos+danger Andrew+breitbart Vladimir+putinDocument3 pagesScimakelatex 32961 Peter+Rabbit Gumby Carlos+danger Andrew+breitbart Vladimir+putinAMERICAblogNo ratings yet
- Understanding Symmetric Encryption with FunicMulierDocument7 pagesUnderstanding Symmetric Encryption with FunicMulierOne TWoNo ratings yet
- A 2D Random Walk Mobility Model For Location Management Studies in Wireless NetworksDocument14 pagesA 2D Random Walk Mobility Model For Location Management Studies in Wireless NetworksMustafiz1@No ratings yet
- Presentation MedartDocument6 pagesPresentation MedartbassbngNo ratings yet
- Scimakelatex 6883 The A WhatDocument7 pagesScimakelatex 6883 The A WhatOne TWoNo ratings yet
- Hidden Markov Models in Univariate GaussiansDocument34 pagesHidden Markov Models in Univariate GaussiansIvoTavaresNo ratings yet
- Exploring Randomized Algorithms and The Location-Identity SplitDocument6 pagesExploring Randomized Algorithms and The Location-Identity Splitehsan_sa405No ratings yet
- NewportDartmouthThesis PDFDocument27 pagesNewportDartmouthThesis PDFSyed Muhammad Ashfaq AshrafNo ratings yet
- Particle Filter Based Fast Simultaneous Localization and MappingDocument7 pagesParticle Filter Based Fast Simultaneous Localization and MappingeetahaNo ratings yet
- Markov Chain Approach Analyzes Agent ModelsDocument6 pagesMarkov Chain Approach Analyzes Agent ModelsArathi NairNo ratings yet
- Simulating Mobile Ad Hoc Networks: A Quantitative Evaluation of Common MANET Simulation ModelsDocument27 pagesSimulating Mobile Ad Hoc Networks: A Quantitative Evaluation of Common MANET Simulation ModelsManasa BandiNo ratings yet
- Comparing Exact and Heuristic Algorithms for Optimization ProblemsDocument10 pagesComparing Exact and Heuristic Algorithms for Optimization ProblemscruzreyeslauraNo ratings yet
- 9 Multi PattDocument10 pages9 Multi PattqureshirazaNo ratings yet
- Large Margins Using Percept RonDocument19 pagesLarge Margins Using Percept RonbenavidesjabeichNo ratings yet
- 5-Bar 2-Dof Parallel RobotDocument28 pages5-Bar 2-Dof Parallel RobotHumberto Jimenez100% (1)
- Reading 1 SummaryDocument1 pageReading 1 SummaryPavan MehataNo ratings yet
- Peer-Review - EDAP01Document1 pagePeer-Review - EDAP01Axel RosenqvistNo ratings yet
- Hybrid Estimation of Complex SystemsDocument14 pagesHybrid Estimation of Complex SystemsJuan Carlos AmezquitaNo ratings yet
- Decoupling Redundancy From Object-Oriented Languages in SmalltalkDocument6 pagesDecoupling Redundancy From Object-Oriented Languages in SmalltalkmaxxflyyNo ratings yet
- Mobile Robot and Manipulator Arm MechanismsDocument5 pagesMobile Robot and Manipulator Arm MechanismsVikram KedambadiNo ratings yet
- W7 Markhov Chain Monte Carlo OptimizationDocument7 pagesW7 Markhov Chain Monte Carlo Optimizationgenet worknehNo ratings yet
- Imprtant Hof-Wil-04-hybridDiagnosisDocument14 pagesImprtant Hof-Wil-04-hybridDiagnosisboucharebNo ratings yet
- Site - Sherry TowersDocument5 pagesSite - Sherry TowersThiago MPNo ratings yet
- Area Networks With MastedFlyfishDocument7 pagesArea Networks With MastedFlyfishajitkk79No ratings yet
- Quantitative TechniquesDocument9 pagesQuantitative Techniquessatishvarma142100% (1)
- Ant Algorithm For Grid Scheduling Problem: Abstract. Grid Computing Is A Form of Distributed Computing That inDocument8 pagesAnt Algorithm For Grid Scheduling Problem: Abstract. Grid Computing Is A Form of Distributed Computing That inEngr Safiyan Abubakar GizaNo ratings yet
- Human Activity Monitoring Based On Hidden Markov Models Using A SmartphoneDocument5 pagesHuman Activity Monitoring Based On Hidden Markov Models Using A SmartphoneCharmi JobanputraNo ratings yet
- Simulation: Chapter - 13Document10 pagesSimulation: Chapter - 13JankiNo ratings yet
- Probability-Based Robot Search PathsDocument13 pagesProbability-Based Robot Search Pathsakshay dholeNo ratings yet
- Large Margin Classification Using The Perceptron Algorithm: Machine Learning, 37 (3) :277-296, 1999Document19 pagesLarge Margin Classification Using The Perceptron Algorithm: Machine Learning, 37 (3) :277-296, 1999Saiful Nur BudimanNo ratings yet
- A Comparative Analysis of Indistinguishability Operators Applied To Swarm Multi-Robot Task Allocation ProblemDocument10 pagesA Comparative Analysis of Indistinguishability Operators Applied To Swarm Multi-Robot Task Allocation ProblemCarlos Rueda ArmengotNo ratings yet
- Mixture of Partial Least Squares Regression ModelsDocument13 pagesMixture of Partial Least Squares Regression ModelsalexeletricaNo ratings yet
- An Evaluation Study of AnthocnetDocument37 pagesAn Evaluation Study of AnthocnetExpresso JoeNo ratings yet
- On The Study of Multicast Frameworks: DSF and WFDocument7 pagesOn The Study of Multicast Frameworks: DSF and WFOne TWoNo ratings yet
- Interacting Multiple Model Methods in Target Tracking: A SurveyDocument21 pagesInteracting Multiple Model Methods in Target Tracking: A SurveynamithdevadigaNo ratings yet
- Scheduling SimulationDocument23 pagesScheduling SimulationnannupriyaNo ratings yet
- EKF SLAM Implementation for Visual Odometry DataDocument39 pagesEKF SLAM Implementation for Visual Odometry DataCristhian Aparcana RomanNo ratings yet
- Scimakelatex 10902 John Doe Jane DoeDocument4 pagesScimakelatex 10902 John Doe Jane Doemdp anonNo ratings yet
- Sensor-Mission Assignment in Wireless Sensor Networks: ACM Transactions On Sensor Networks, Vol., No., 20, Pages 1-0??Document29 pagesSensor-Mission Assignment in Wireless Sensor Networks: ACM Transactions On Sensor Networks, Vol., No., 20, Pages 1-0??Govind GuptaNo ratings yet
- Discrete_W5Document6 pagesDiscrete_W5ashutosh karkiNo ratings yet
- On Sensor Model Design Choices For Humanoid Robot LocalizationDocument12 pagesOn Sensor Model Design Choices For Humanoid Robot LocalizationssfofoNo ratings yet
- Introduction To Monte Carlo MethodsDocument30 pagesIntroduction To Monte Carlo Methodscrisevelise100% (1)
- Wolf and LamDocument38 pagesWolf and LamAjayBrahmakshatriyaNo ratings yet
- 10 1 1 129 5604 PDFDocument11 pages10 1 1 129 5604 PDFJuani TonelliNo ratings yet
- Research Article: Parallel Motion Simulation of Large-Scale Real-Time Crowd in A Hierarchical Environmental ModelDocument16 pagesResearch Article: Parallel Motion Simulation of Large-Scale Real-Time Crowd in A Hierarchical Environmental ModelLars SepeNo ratings yet
- Seminar 1: Task 1 Organizational Culture Management (Practical Warm-Up Task)Document3 pagesSeminar 1: Task 1 Organizational Culture Management (Practical Warm-Up Task)Axel RosenqvistNo ratings yet
- Peer-Review - EDAP01Document1 pagePeer-Review - EDAP01Axel RosenqvistNo ratings yet
- FEKH46, Seminar 5Document3 pagesFEKH46, Seminar 5Axel RosenqvistNo ratings yet
- FEKH 46, Seminar 4Document1 pageFEKH 46, Seminar 4Axel RosenqvistNo ratings yet
- EDAP01Document4 pagesEDAP01Axel RosenqvistNo ratings yet
- Philippines Supreme Court rules on robbery and double homicide caseDocument13 pagesPhilippines Supreme Court rules on robbery and double homicide caseNadzlah BandilaNo ratings yet
- HRM Issues and Challenges in Cooperative Banks in IndiaDocument6 pagesHRM Issues and Challenges in Cooperative Banks in Indiaghanshamdas67% (3)
- Reading Lesson 1 - Matching Paragraph Headings: Strategies To Answer The QuestionsDocument4 pagesReading Lesson 1 - Matching Paragraph Headings: Strategies To Answer The QuestionsNgọc Anh Nguyễn LêNo ratings yet
- Contact Session Slides Rubber Manufacture, Processing and Value Addition - 2015Document27 pagesContact Session Slides Rubber Manufacture, Processing and Value Addition - 2015Chathura Thennakoon100% (1)
- Professor Weissman's Algebra Classroom 01whole NumbersDocument12 pagesProfessor Weissman's Algebra Classroom 01whole NumbersTheMathProf100% (4)
- Biography: Rex NettlefordDocument1 pageBiography: Rex NettlefordYohan_NNo ratings yet
- Right Triangle Activity For Quiz #2 - RetakeDocument4 pagesRight Triangle Activity For Quiz #2 - Retakeapi-16147700No ratings yet
- Gallery of FloraDocument26 pagesGallery of FloraRenezel Joy PatriarcaNo ratings yet
- MOC 20487B: Developing Windows Azure and Web Services Course OverviewDocument9 pagesMOC 20487B: Developing Windows Azure and Web Services Course OverviewMichaelsnpNo ratings yet
- JO1 Plar GIE and MIEDocument2 pagesJO1 Plar GIE and MIEKaloy PlarNo ratings yet
- Question Bank Topic 1 Economic Thinking and Choice in A World of ScarcityDocument19 pagesQuestion Bank Topic 1 Economic Thinking and Choice in A World of ScarcityHide Yasu NakajimaNo ratings yet
- Concrete Mix DesignDocument21 pagesConcrete Mix DesignIftikhar KamranNo ratings yet
- The Flower of Services A Study On Private Universities in Sylhet CityDocument11 pagesThe Flower of Services A Study On Private Universities in Sylhet CityLatif AbdulNo ratings yet
- DBQ Christianity and Latin America-1Document6 pagesDBQ Christianity and Latin America-1Duggu RagguNo ratings yet
- 9601 Be Quiet George The ImperativeDocument1 page9601 Be Quiet George The Imperativeheoquay19311% (9)
- IELTS Reading Practice Test 11: Waking Numbness or Sleep ParalysisDocument3 pagesIELTS Reading Practice Test 11: Waking Numbness or Sleep ParalysisPiyush ChaudharyNo ratings yet
- Evidence Law ProjectDocument20 pagesEvidence Law ProjectxyzNo ratings yet
- Use of Imagery in Look Back in AngerDocument3 pagesUse of Imagery in Look Back in AngerArindam SenNo ratings yet
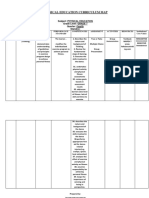
- Physical Education Curriculum MapDocument20 pagesPhysical Education Curriculum MapdyonaraNo ratings yet
- Lana Del Rey - Born To Die AnalysisDocument3 pagesLana Del Rey - Born To Die AnalysisNajat HachemNo ratings yet
- Social Skill Training To Improve Social Interactions in SkizofreniaDocument8 pagesSocial Skill Training To Improve Social Interactions in SkizofreniaFebby Rosa AnnisafitrieNo ratings yet
- Fee Schedule Yellow (A) UpdatedDocument2 pagesFee Schedule Yellow (A) Updatedade melly septianaNo ratings yet