You might also like
- Immo Off FilesDocument6 pagesImmo Off Filesاليزيد بن توهامي100% (1)
- The Final War by Judge Rutherford, 1932Document65 pagesThe Final War by Judge Rutherford, 1932sirjsslutNo ratings yet
- CARDIOPULMONARY BYPASS - CompressedDocument117 pagesCARDIOPULMONARY BYPASS - CompressedBayan TahaNo ratings yet
- Rochet: Short Course For Papua New Guinea Non-Formal SectorDocument22 pagesRochet: Short Course For Papua New Guinea Non-Formal SectorKim So-HyunNo ratings yet
- CP System For BulletsDocument37 pagesCP System For BulletsAnonymous TBAzJ8Ejd100% (1)
- CH 15Document193 pagesCH 15Neerom BaldemoroNo ratings yet
- Sp3510 User ManualDocument48 pagesSp3510 User Manualchristos1157No ratings yet
- Research Article Mission Planning For Unmanned Aerial Vehicles Based On Voronoi Diagram-Tabu Genetic AlgorithmDocument12 pagesResearch Article Mission Planning For Unmanned Aerial Vehicles Based On Voronoi Diagram-Tabu Genetic AlgorithmSofia KaramitsianiNo ratings yet
- Chen2013 PDFDocument17 pagesChen2013 PDFirqoviNo ratings yet
- UAV Path Planning Based On Receding Horizon Control With Adaptive StrategyDocument5 pagesUAV Path Planning Based On Receding Horizon Control With Adaptive StrategySofia KaramitsianiNo ratings yet
- A Hierarchical Optimization Strategy of Trajectory Planning For Multi-UAVsDocument5 pagesA Hierarchical Optimization Strategy of Trajectory Planning For Multi-UAVsmarion.martin031995No ratings yet
- Efficient 3D Path Planning For Drone Swarm Using IDocument30 pagesEfficient 3D Path Planning For Drone Swarm Using IVTOL ODTÜNo ratings yet
- Effic Path PlnnninDocument14 pagesEffic Path PlnnninNAENWI YAABARINo ratings yet
- A Hybrid Genetic Algorithm On Routing and Scheduling For Vehicle-Assisted Multi-Drone Parcel DeliveryDocument10 pagesA Hybrid Genetic Algorithm On Routing and Scheduling For Vehicle-Assisted Multi-Drone Parcel DeliveryThalapathy VijayNo ratings yet
- Ocean Engineering: Yu WuDocument12 pagesOcean Engineering: Yu WuhermioneNo ratings yet
- Autonomous Control of UAV Trajectory Based On RHC Rada 2024 Aerospace SciencDocument49 pagesAutonomous Control of UAV Trajectory Based On RHC Rada 2024 Aerospace Sciencditimehta1234No ratings yet
- A Multi-Objective Coverage Path Planning Algorithm For UAVs To Cover Spatially Distributed Regions in Urban EnvironmentsDocument35 pagesA Multi-Objective Coverage Path Planning Algorithm For UAVs To Cover Spatially Distributed Regions in Urban EnvironmentsKarim EL BouyahyiouyNo ratings yet
- Particle Swarm Optimization For Target Encirclement by A UAV FormationDocument8 pagesParticle Swarm Optimization For Target Encirclement by A UAV FormationMuhammad ShafiqNo ratings yet
- Cooperative Localization Based Multi-AUV Trajectory Planning For Target Approaching in Anchor-Free EnvironmentsDocument16 pagesCooperative Localization Based Multi-AUV Trajectory Planning For Target Approaching in Anchor-Free EnvironmentsGabrielZamanNo ratings yet
- Robust Path Planning For Avoiding Obstacles UsingDocument8 pagesRobust Path Planning For Avoiding Obstacles UsingAtiso OtisaNo ratings yet
- Slot Allocation in A Multi-Airport System Under Flying Time UncertaintyDocument9 pagesSlot Allocation in A Multi-Airport System Under Flying Time UncertaintyLoshanNo ratings yet
- 2020 An Overview Survey and Challenges in UAVs Communication NetworkDocument6 pages2020 An Overview Survey and Challenges in UAVs Communication Networktoan đinhNo ratings yet
- Research Collection: Continuous-Time Trajectory Optimization For Online UAV ReplanningDocument9 pagesResearch Collection: Continuous-Time Trajectory Optimization For Online UAV ReplanningЄвген ВознюкNo ratings yet
- Landing Route Planning Method For Micro Drones Based On HybridDocument5 pagesLanding Route Planning Method For Micro Drones Based On HybridGhalidh ChoirNo ratings yet
- Single Landmark Distance-Based NavigationDocument8 pagesSingle Landmark Distance-Based NavigationAdeeba AliNo ratings yet
- Mechatronics Revista v05Document8 pagesMechatronics Revista v05churrteNo ratings yet
- Multi-UAV Path Planning in Obstacle Rich Environments Using Rapidly-Exploring Random TreesDocument6 pagesMulti-UAV Path Planning in Obstacle Rich Environments Using Rapidly-Exploring Random Treesmarion.martin031995No ratings yet
- Robust Trajectory Planning For Spatial-Temporal Multi-Drone Coordination in Large ScenesDocument7 pagesRobust Trajectory Planning For Spatial-Temporal Multi-Drone Coordination in Large Scenesmarion.martin031995No ratings yet
- Trajectory Synthesis For A UAV Swarm Based On Resilient Data Collection ObjectivesDocument14 pagesTrajectory Synthesis For A UAV Swarm Based On Resilient Data Collection ObjectivesYoussef ameurNo ratings yet
- Collision Avoidance Strategies For Unmanned Aerial Vehicles in Formation FlightDocument17 pagesCollision Avoidance Strategies For Unmanned Aerial Vehicles in Formation FlightAnonymous t5MrKaXDNo ratings yet
- Sensors 20 01080Document18 pagesSensors 20 01080Juan SzymanskiNo ratings yet
- Drones: Optimization Methods Applied To Motion Planning of Unmanned Aerial Vehicles: A ReviewDocument22 pagesDrones: Optimization Methods Applied To Motion Planning of Unmanned Aerial Vehicles: A ReviewvanhaimtaNo ratings yet
- A Multi-Objective Multi-Memetic Algorithm For Network-Wide Conflict-Free 4D Flight Trajectories PlanningDocument13 pagesA Multi-Objective Multi-Memetic Algorithm For Network-Wide Conflict-Free 4D Flight Trajectories Planningnicolae adrian DincaNo ratings yet
- 1 s2.0 S0167739X18325299 MainDocument9 pages1 s2.0 S0167739X18325299 Mainroi.ho2706No ratings yet
- Electronics 12 02820Document21 pagesElectronics 12 02820chandra sekharNo ratings yet
- Drones 07 00679Document22 pagesDrones 07 00679谭维维No ratings yet
- Optimal Path Planning For Drones Based On Swarm Intelligence AlgorithmDocument23 pagesOptimal Path Planning For Drones Based On Swarm Intelligence AlgorithmSofia KaramitsianiNo ratings yet
- PPS Energy-Aware Grid-Based Coverage Path PlanningDocument32 pagesPPS Energy-Aware Grid-Based Coverage Path PlanningSami FarhatNo ratings yet
- Cobertura Optima UAV CortadoDocument11 pagesCobertura Optima UAV CortadoPabloNo ratings yet
- Robotics: Cooperative Optimization of Uavs Formation Visual TrackingDocument22 pagesRobotics: Cooperative Optimization of Uavs Formation Visual TrackingEngMohamedReyadHelesyNo ratings yet
- Reduas - 2017 J. BragaDocument6 pagesReduas - 2017 J. BragaJuan BeNo ratings yet
- Thibbotuwawa - Problemas de Ruta de Vehículos Aéreos No Tripulados Una Revisión de La LiteraturaDocument20 pagesThibbotuwawa - Problemas de Ruta de Vehículos Aéreos No Tripulados Una Revisión de La LiteraturajuanjoNo ratings yet
- Path Planning For Non-Circular Micro Aerial Vehicles in ConstrainedDocument8 pagesPath Planning For Non-Circular Micro Aerial Vehicles in ConstrainedRaper AndresNo ratings yet
- Research Article An Energy-Balanced Path Planning Algorithm For Multiple Ferrying Uavs Based On GaDocument15 pagesResearch Article An Energy-Balanced Path Planning Algorithm For Multiple Ferrying Uavs Based On GaSofia KaramitsianiNo ratings yet
- Path Planning For Multi-Uav Formation: Yongbo Chen Jianqiao Yu Xiaolong Su Guanchen LuoDocument18 pagesPath Planning For Multi-Uav Formation: Yongbo Chen Jianqiao Yu Xiaolong Su Guanchen LuoSofia KaramitsianiNo ratings yet
- 1 - Truck-Drone Team Logistics A Heuristic Approach PDFDocument24 pages1 - Truck-Drone Team Logistics A Heuristic Approach PDFAndres Vega ValenciaNo ratings yet
- Multiobjective Trajectory Optimization Algorithms For Solving Multi UAV Assisted Mobile Edge Computing ProblemDocument30 pagesMultiobjective Trajectory Optimization Algorithms For Solving Multi UAV Assisted Mobile Edge Computing ProblemMD OZAIR ARSHADNo ratings yet
- How Far Two Uavs Should Be Subject To Communication UncertaintiesDocument18 pagesHow Far Two Uavs Should Be Subject To Communication Uncertaintieswayne.nguyenNo ratings yet
- Yang Et Al, 2024Document14 pagesYang Et Al, 2024Álvaro MendozaNo ratings yet
- Deep Semantic Image Segmentation For UAV-UGV Cooperative Path Planning A Car Park Use CaseDocument6 pagesDeep Semantic Image Segmentation For UAV-UGV Cooperative Path Planning A Car Park Use CaseZohaib KhanNo ratings yet
- Drones 05 00098 v2Document18 pagesDrones 05 00098 v2Georgios CostopNo ratings yet
- 1 s2.0 S1000936120301205 MainDocument12 pages1 s2.0 S1000936120301205 MainAysha SherinNo ratings yet
- 1 s2.0 S0926580522005799 MainDocument15 pages1 s2.0 S0926580522005799 MainNoviaNo ratings yet
- Fault-Tolerant Cooperative Navigation of Networked UAV Swarms For Forest Fire MonitoringDocument12 pagesFault-Tolerant Cooperative Navigation of Networked UAV Swarms For Forest Fire MonitoringSuhas DevmaneNo ratings yet
- Solving Area Coverage Problem With Uavs: A Vehicle Routing With Time Windows VariationDocument20 pagesSolving Area Coverage Problem With Uavs: A Vehicle Routing With Time Windows VariationDeepak KushwahaNo ratings yet
- (IJCST-V5I2P92) :dabbiru Ravi VikranthDocument5 pages(IJCST-V5I2P92) :dabbiru Ravi VikranthEighthSenseGroupNo ratings yet
- A Survey of Channel Modeling For UAV CommunicationsDocument19 pagesA Survey of Channel Modeling For UAV CommunicationsLOCHARLA SANDEEPNo ratings yet
- 1 s2.0 S1874490723000769 MainDocument21 pages1 s2.0 S1874490723000769 MainHANS MAYCOL VICENTE ALEJANDRONo ratings yet
- Puede SerDocument14 pagesPuede SerKarenNo ratings yet
- Remotesensing 12 03035Document28 pagesRemotesensing 12 03035đạt lê viếtNo ratings yet
- Real-Time Obstacle Avoidance of Hovercraft Based On Follow The Gap With Dynamic Window ApproachDocument8 pagesReal-Time Obstacle Avoidance of Hovercraft Based On Follow The Gap With Dynamic Window ApproachH JNo ratings yet
- Astar and Predictive ControlDocument15 pagesAstar and Predictive Controlmarion.martin031995No ratings yet
- GR 7 - 2006 - IEEE T-Sys-Man-Cyber-B - Rendezvous-Guidance Trajectory Planning For Robotic Dynamic Obstacle Avoidance and InterceptionDocument10 pagesGR 7 - 2006 - IEEE T-Sys-Man-Cyber-B - Rendezvous-Guidance Trajectory Planning For Robotic Dynamic Obstacle Avoidance and InterceptionRISHABH JAMBHULKARNo ratings yet
- Collision Avoidance in Fixed-Wing UAV Formation Flight Based On A Consensus Control AlgorithmDocument11 pagesCollision Avoidance in Fixed-Wing UAV Formation Flight Based On A Consensus Control Algorithmphantuan8antNo ratings yet
- Eaoa: Energy-Aware Grid-Based 3D-Obstacle Avoidance in Coverage Path Planning For UavsDocument21 pagesEaoa: Energy-Aware Grid-Based 3D-Obstacle Avoidance in Coverage Path Planning For UavsSami FarhatNo ratings yet
- Autonomy and Unmanned Vehicles: Augmented Reactive Mission and Motion Planning ArchitectureFrom EverandAutonomy and Unmanned Vehicles: Augmented Reactive Mission and Motion Planning ArchitectureNo ratings yet
- Small Unmanned Aircraft: Theory and PracticeFrom EverandSmall Unmanned Aircraft: Theory and PracticeRating: 4.5 out of 5 stars4.5/5 (2)
- SODA Similar 3D Object Detection Accelerator at Network Edge For Autonomous DrivingDocument10 pagesSODA Similar 3D Object Detection Accelerator at Network Edge For Autonomous DrivingSofia KaramitsianiNo ratings yet
- Research Article An Energy-Balanced Path Planning Algorithm For Multiple Ferrying Uavs Based On GaDocument15 pagesResearch Article An Energy-Balanced Path Planning Algorithm For Multiple Ferrying Uavs Based On GaSofia KaramitsianiNo ratings yet
- Path Planning For Multi-Uav Formation: Yongbo Chen Jianqiao Yu Xiaolong Su Guanchen LuoDocument18 pagesPath Planning For Multi-Uav Formation: Yongbo Chen Jianqiao Yu Xiaolong Su Guanchen LuoSofia KaramitsianiNo ratings yet
- 3D Path Planning For Multiple Uavs For Maximum Information CollectionDocument26 pages3D Path Planning For Multiple Uavs For Maximum Information CollectionSofia KaramitsianiNo ratings yet
- Minimum-Time Path Planning For Autonomous Landing of UAV On Aerial Drone CarrierDocument6 pagesMinimum-Time Path Planning For Autonomous Landing of UAV On Aerial Drone CarrierSofia KaramitsianiNo ratings yet
- Optimal Path Planning For Drones Based On Swarm Intelligence AlgorithmDocument23 pagesOptimal Path Planning For Drones Based On Swarm Intelligence AlgorithmSofia KaramitsianiNo ratings yet
- Chapter - I (Electrical Safety)Document30 pagesChapter - I (Electrical Safety)Hunter HarshaNo ratings yet
- K01299 - 20211018160945 - SBF3043 Chapter 3 - Digestive SystemDocument52 pagesK01299 - 20211018160945 - SBF3043 Chapter 3 - Digestive SystemChimChim UrkNo ratings yet
- Tacticity, Geometric IsomerismDocument7 pagesTacticity, Geometric IsomerismbornxNo ratings yet
- Bitting Your Horse BlueprintDocument17 pagesBitting Your Horse BlueprintPaola TorresNo ratings yet
- Harga Satuan Precast 2017Document2 pagesHarga Satuan Precast 2017GenTigaBrotherhood BantenNo ratings yet
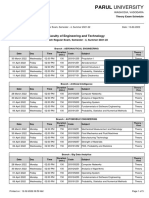
- Parul University: Faculty of Engineering and TechnologyDocument5 pagesParul University: Faculty of Engineering and TechnologySudhanshu SinghNo ratings yet
- 2 PerformanceofflowingwellsDocument16 pages2 PerformanceofflowingwellsnciriNo ratings yet
- The Beauty of HolinessDocument5 pagesThe Beauty of HolinessGrace Church Modesto100% (1)
- Industry Implications For Global Supply ChainsDocument4 pagesIndustry Implications For Global Supply ChainsPhương Anh NguyễnNo ratings yet
- Completed Project AjiDocument31 pagesCompleted Project AjiFawaz AzadNo ratings yet
- Dinah HWDocument6 pagesDinah HWDinah AquinoNo ratings yet
- Moonshot Beer Summary of Rec 2Document4 pagesMoonshot Beer Summary of Rec 2Hassan AhmadNo ratings yet
- Falkland War - A Brief Overview DraftDocument119 pagesFalkland War - A Brief Overview DraftKanthan JeyaprakashNo ratings yet
- Electrochemistry Lecture 3 - NotesDocument14 pagesElectrochemistry Lecture 3 - NotesCraftychemistNo ratings yet
- Caced Set2Document19 pagesCaced Set2Anonymous SEDun6PWNo ratings yet
- Ui PATH - RE FRAMEWORKDocument2 pagesUi PATH - RE FRAMEWORKsaubhagya ranjan mohapatraNo ratings yet
- Lecture3 PDFDocument12 pagesLecture3 PDFYogi AldinoNo ratings yet
- Kratos Pitch Deck PresentationDocument14 pagesKratos Pitch Deck PresentationCS-B Dhanya Lakshmi GNo ratings yet
- Study On Solar Irrigation System in BangladeshDocument61 pagesStudy On Solar Irrigation System in Bangladeshavocadocolor100% (2)
- Smart Manufacturing For The Oil Refining and Petrochemical IndustryDocument4 pagesSmart Manufacturing For The Oil Refining and Petrochemical IndustryMd Sultan AhemadNo ratings yet
- Modeling of Noncatalytic Gas-Solid ReactionsDocument20 pagesModeling of Noncatalytic Gas-Solid ReactionsLuis PaletoNo ratings yet
- Lesson PlanDocument6 pagesLesson PlanffffffNo ratings yet
- Service Manual: LCI-100/200 Illumination and Imaging SystemDocument69 pagesService Manual: LCI-100/200 Illumination and Imaging SystemfugarisaNo ratings yet