You might also like
- Template Project Approach QuestionnaireDocument1 pageTemplate Project Approach QuestionnaireSara AliNo ratings yet
- MOS Integrated Circuit DesignFrom EverandMOS Integrated Circuit DesignE. WolfendaleNo ratings yet
- A Daily Morning PrayerDocument8 pagesA Daily Morning Prayerjhustine05100% (1)
- Calculation of Inductance and Capacitance in Power System Transmission Lines Using Finite Element Analysis MethodDocument6 pagesCalculation of Inductance and Capacitance in Power System Transmission Lines Using Finite Element Analysis Methodcommunist88No ratings yet
- Building Lean Supply ChainsDocument33 pagesBuilding Lean Supply ChainsJefri MustaphaNo ratings yet
- Accounting Project Topics and Materials in NigeriaDocument97 pagesAccounting Project Topics and Materials in NigeriaProject Championz100% (2)
- (Paper) (IEEE) Cronoa Losses in HVDC Bipolar Lines - Corbellini, Pelacchi. - 1996 PDFDocument7 pages(Paper) (IEEE) Cronoa Losses in HVDC Bipolar Lines - Corbellini, Pelacchi. - 1996 PDFAlejandro Antonio Ferrada JaraNo ratings yet
- The Whole History of the Earth and LifeDocument2 pagesThe Whole History of the Earth and LifeEdward John Tensuan100% (1)
- Bahmani2021 2Document5 pagesBahmani2021 2az BNo ratings yet
- Power Allocation in RelayingDocument4 pagesPower Allocation in RelayingArunmozhi SinouvassaneNo ratings yet
- Relay Selection For Two-Way Relaying With Amplify-And-Forward ProtocolsDocument6 pagesRelay Selection For Two-Way Relaying With Amplify-And-Forward ProtocolsRegina PittsNo ratings yet
- Capacity Maximizing Adaptive Power Splitting Protocol For Cooperative Energy Harvesting Communication SystemsDocument4 pagesCapacity Maximizing Adaptive Power Splitting Protocol For Cooperative Energy Harvesting Communication SystemsAnh Nhat NguyenNo ratings yet
- Convolutional Coded On-Off Keying Free-Space Optical Links Over Fading ChannelsDocument6 pagesConvolutional Coded On-Off Keying Free-Space Optical Links Over Fading ChannelsseventhsensegroupNo ratings yet
- Toh 1988Document9 pagesToh 1988subham subhashisNo ratings yet
- Adaptive Coded Modulation With Receive Antenna Diversity and Imperfect Channel Knowledge at Receiver and TransmitterDocument7 pagesAdaptive Coded Modulation With Receive Antenna Diversity and Imperfect Channel Knowledge at Receiver and TransmitterMatthew Luis Llano LoveraNo ratings yet
- First-Zone Distance Relaying Algorithm of Parallel Transmission Lines For Cross-Country Nonearthed FaultsDocument9 pagesFirst-Zone Distance Relaying Algorithm of Parallel Transmission Lines For Cross-Country Nonearthed FaultsFabien CallodNo ratings yet
- IEEE Transactions on Microwave Theory and Techniques 1968Document10 pagesIEEE Transactions on Microwave Theory and Techniques 1968Alexander SarafovNo ratings yet
- Zs 2010 19 ChinacomDocument7 pagesZs 2010 19 ChinacomkonenianithaNo ratings yet
- 3.power Quality Assessment Via Wavelet Transform AnalysisDocument7 pages3.power Quality Assessment Via Wavelet Transform AnalysisswatisamadhiyaNo ratings yet
- Statistical Evaluation of The Azimuth and Elevation Angles Seen at The Output of The Receiving AntennaDocument6 pagesStatistical Evaluation of The Azimuth and Elevation Angles Seen at The Output of The Receiving AntennaJavier MelendrezNo ratings yet
- MagiaDocument3 pagesMagiaQuimey Leo Khan BernalNo ratings yet
- Marew17 TanDocument5 pagesMarew17 TanNguyenNo ratings yet
- Power Allocation Based On SEP Minimization in Two-Hop Decode-and-Forward Relay NetworksDocument10 pagesPower Allocation Based On SEP Minimization in Two-Hop Decode-and-Forward Relay NetworksballmerNo ratings yet
- Rectenna Design and Optimization Using Reciprocity Theory and Harmonic Balance Analysis For Electromagnetic (EM) Energy HarvestingDocument3 pagesRectenna Design and Optimization Using Reciprocity Theory and Harmonic Balance Analysis For Electromagnetic (EM) Energy HarvestingFabiano SilveiraNo ratings yet
- Circuit Modeling Methodology For UWB Omnidirectional Small AntennasDocument7 pagesCircuit Modeling Methodology For UWB Omnidirectional Small AntennasDr-Gurpreet KumarNo ratings yet
- On The Performance of Cooperative Amplify-and-Forward Relay NetworksDocument8 pagesOn The Performance of Cooperative Amplify-and-Forward Relay NetworksballmerNo ratings yet
- Dokumen - Tips - Ray Tube Integration in Shooting and Bouncing Ray MethodDocument4 pagesDokumen - Tips - Ray Tube Integration in Shooting and Bouncing Ray MethodAsd DsaNo ratings yet
- Optimum Threshold Selection Relaying Improves BER by 10 dBDocument6 pagesOptimum Threshold Selection Relaying Improves BER by 10 dBballmerNo ratings yet
- PTCaballero CLAGTEEDocument6 pagesPTCaballero CLAGTEEMau Gar EcNo ratings yet
- 2005 10 Milcom ChanquanDocument7 pages2005 10 Milcom ChanquanKehindeOdeyemiNo ratings yet
- Physical Communication: Mohammadreza Babaei Ümit Aygölü Ertugrul BasarDocument9 pagesPhysical Communication: Mohammadreza Babaei Ümit Aygölü Ertugrul Basarburak ahmet özdenNo ratings yet
- Error Rate Performance in OFDM-based Cooperative NetworksDocument5 pagesError Rate Performance in OFDM-based Cooperative NetworksvictorwuNo ratings yet
- Precoding-Aided Spatial Modulation With Increased Robustness To Channel CorrelationsDocument4 pagesPrecoding-Aided Spatial Modulation With Increased Robustness To Channel Correlationshendra lamNo ratings yet
- Outage Probability Analysis of Wireless Relay and Cooperative Networks in Rician Fading Channels With Different - FactorsDocument5 pagesOutage Probability Analysis of Wireless Relay and Cooperative Networks in Rician Fading Channels With Different - FactorsballmerNo ratings yet
- Electrical Power and Energy Systems: Ricardo Caneloi Dos Santos, Eduardo Cesar SengerDocument10 pagesElectrical Power and Energy Systems: Ricardo Caneloi Dos Santos, Eduardo Cesar SengerAli AsaadNo ratings yet
- Capacity and Power Allocation For Fading MIMO Channels With Channel Estimation ErrorDocument12 pagesCapacity and Power Allocation For Fading MIMO Channels With Channel Estimation ErrorNadeem PashaNo ratings yet
- SpacediversityDocument5 pagesSpacediversityHakunaMatata_76No ratings yet
- Performance Analysis For Downlink Massive MIMO Sytem With ZF PrecodingDocument12 pagesPerformance Analysis For Downlink Massive MIMO Sytem With ZF PrecodingTewelgn KebedeNo ratings yet
- IET Generation Trans Dist - 2021 - Challa - An Algorithm for Fitting Passive Equivalent Circuits for Lumped ParameterDocument14 pagesIET Generation Trans Dist - 2021 - Challa - An Algorithm for Fitting Passive Equivalent Circuits for Lumped Parameterjosdebakker7No ratings yet
- 08-06-2022-1654686796-6-.-4. Engg - Enhanced Underwater Acoustic Communication Using F-SGM and Spectral Coherence Based Wavelet TransformDocument8 pages08-06-2022-1654686796-6-.-4. Engg - Enhanced Underwater Acoustic Communication Using F-SGM and Spectral Coherence Based Wavelet TransformImpact JournalsNo ratings yet
- Understanding and Measuring Circular PolarizationDocument6 pagesUnderstanding and Measuring Circular PolarizationpremNo ratings yet
- BER and SER Based Performance Analysis of BPSK and QPSKDocument9 pagesBER and SER Based Performance Analysis of BPSK and QPSKASHISH K ADIGANo ratings yet
- DS-CDMA System Analysis in Fading ChannelsDocument5 pagesDS-CDMA System Analysis in Fading ChannelsAnonymous JPbUTto8tqNo ratings yet
- A Reduced Complexity Channel Estimation For OFDM Systems With Transmit Diversity in Mobile Wireless ChannelsDocument9 pagesA Reduced Complexity Channel Estimation For OFDM Systems With Transmit Diversity in Mobile Wireless ChannelsmobilemobilepuriNo ratings yet
- Power Allocation For Multi-Relay Amplify-and-Forward Cooperative NetworksDocument5 pagesPower Allocation For Multi-Relay Amplify-and-Forward Cooperative NetworksballmerNo ratings yet
- Energy Efficient Bisection Power Allocation LTE-A RelayDocument4 pagesEnergy Efficient Bisection Power Allocation LTE-A Relayirfanahmed446470No ratings yet
- Koga 2015Document6 pagesKoga 2015jasleen kaurNo ratings yet
- Gain Phase Imbalance and Phase Noise Effects On Error Vector MagnitudeDocument7 pagesGain Phase Imbalance and Phase Noise Effects On Error Vector MagnitudeΜάριος ΗλίαNo ratings yet
- Two Rar ModelDocument20 pagesTwo Rar ModelAshish BhardwajNo ratings yet
- Power Allocation For Bidirectional AF Relaying Over Rayleigh Fading Channels-ggMDocument3 pagesPower Allocation For Bidirectional AF Relaying Over Rayleigh Fading Channels-ggMulyjohnignacioNo ratings yet
- Analysis of Wireless Power TransmissionDocument4 pagesAnalysis of Wireless Power TransmissionYERIPINA SATEESH CHANDRA DEV 19-206No ratings yet
- Eddy Current ProbeDocument22 pagesEddy Current ProbeSANTIAGONo ratings yet
- Analytical Model of Double Gate TFETDocument7 pagesAnalytical Model of Double Gate TFETFahad NibirNo ratings yet
- Application of Transmission-Line Model To Dual-Band Stepped Monopole Antenna DesigningDocument4 pagesApplication of Transmission-Line Model To Dual-Band Stepped Monopole Antenna DesigningAtifNo ratings yet
- Measuring harmonic power flow to analyze electric power qualityDocument3 pagesMeasuring harmonic power flow to analyze electric power qualityHelvécioCaldeiraJuniorNo ratings yet
- Channel and Noise Variance Estimation and Tracking Algorithms For Unique-Word Based Single-Carrier SystemsDocument9 pagesChannel and Noise Variance Estimation and Tracking Algorithms For Unique-Word Based Single-Carrier SystemsNibedita NandanNo ratings yet
- Calculation of Resonant Frequency For A Microstrip Antenna With Vertical Slots Using Applying Adaptive Network-Based Fuzzy Inference SystemDocument12 pagesCalculation of Resonant Frequency For A Microstrip Antenna With Vertical Slots Using Applying Adaptive Network-Based Fuzzy Inference SystemChinaski BukowskiNo ratings yet
- Channel Estimation for MIMO RelaysDocument6 pagesChannel Estimation for MIMO RelaysankitNo ratings yet
- Efficiency of Broadband Four-Wave Mixing Wavelength Conversion Using Semiconductor Traveling-Wave AmplifiersDocument3 pagesEfficiency of Broadband Four-Wave Mixing Wavelength Conversion Using Semiconductor Traveling-Wave AmplifiersАйбек АйбековNo ratings yet
- J4 Distortion Correction CircuitsDocument8 pagesJ4 Distortion Correction CircuitsАлексей ГрабкоNo ratings yet
- Theoretical Study of Performance Improvement in GSM Networks Due to Slow Frequency HoppingDocument5 pagesTheoretical Study of Performance Improvement in GSM Networks Due to Slow Frequency HoppingaddulahiNo ratings yet
- Research ArticleDocument12 pagesResearch ArticleSyed BukhariNo ratings yet
- 2 - Rini AstutikDocument6 pages2 - Rini AstutikBelly Yan DewantaraNo ratings yet
- Analysis of self-sensing active magnetic bearings using inductance measurementDocument6 pagesAnalysis of self-sensing active magnetic bearings using inductance measurementanon_223350147No ratings yet
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- A Survey On Semantic Communications For Intelligent Wireless NetworksDocument43 pagesA Survey On Semantic Communications For Intelligent Wireless NetworksElham AbbasiNo ratings yet
- Soft - Transferable Skills - Training - ProgramDocument2 pagesSoft - Transferable Skills - Training - ProgramElham AbbasiNo ratings yet
- 5G Wireless Whitepaper PDFDocument6 pages5G Wireless Whitepaper PDFAsfand Yar AkramNo ratings yet
- SDN Based Optimal User Cooperation and Energy Efficient Resource Allocation in Cloud Assisted Heterogeneous NetworksDocument13 pagesSDN Based Optimal User Cooperation and Energy Efficient Resource Allocation in Cloud Assisted Heterogeneous NetworksElham AbbasiNo ratings yet
- Energy-Efficient Resource Allocation Based On Hypergraph 3D Matching For D2D-Assisted MMTC NetworksDocument7 pagesEnergy-Efficient Resource Allocation Based On Hypergraph 3D Matching For D2D-Assisted MMTC NetworksElham AbbasiNo ratings yet
- Learn English for Effective Scientific CommunicationDocument1 pageLearn English for Effective Scientific CommunicationElham AbbasiNo ratings yet
- Figueiredo 2010 WritingResearchPaper TIJRRDocument6 pagesFigueiredo 2010 WritingResearchPaper TIJRRElham AbbasiNo ratings yet
- Introduction to math careersDocument4 pagesIntroduction to math careersElham AbbasiNo ratings yet
- Quality Control and Quality AssuranceDocument7 pagesQuality Control and Quality AssuranceMoeen Khan Risaldar100% (1)
- Pag-IBIG Employer Enrollment FormDocument1 pagePag-IBIG Employer Enrollment FormDarlyn Etang100% (1)
- What Is Managerial Economics? Explain Its Nature, Scope and ItsDocument9 pagesWhat Is Managerial Economics? Explain Its Nature, Scope and Itsn13shukla85% (20)
- Berkowitz Et Al (2010) - Skills For Psychological Recovery - Field Operations GuideDocument154 pagesBerkowitz Et Al (2010) - Skills For Psychological Recovery - Field Operations GuideRita CamiloNo ratings yet
- Secu Gen Hamster Pro 20Document2 pagesSecu Gen Hamster Pro 20Ashish GusainNo ratings yet
- Economics Principles and Policy 13th Edition Baumol Solutions ManualDocument2 pagesEconomics Principles and Policy 13th Edition Baumol Solutions ManualCraigGonzalezaxzgd100% (17)
- Bachelor of Arts (Psychology HR Management) Y3 V2Document1 pageBachelor of Arts (Psychology HR Management) Y3 V2Kenny sylvainNo ratings yet
- Unit 1 of EthicsDocument110 pagesUnit 1 of EthicsAbhinav kumar SinghNo ratings yet
- Actor analysis explores decision-making in environmental governanceDocument48 pagesActor analysis explores decision-making in environmental governancerizkyNo ratings yet
- What ATF - CVTF To Use For ToyotaDocument7 pagesWhat ATF - CVTF To Use For ToyotaSydneyKasongoNo ratings yet
- My CV - Rose ChebetDocument5 pagesMy CV - Rose ChebetSammy WatimaNo ratings yet
- MMC Fiori Cheat Sheet PDFDocument2 pagesMMC Fiori Cheat Sheet PDFAleksandar KNo ratings yet
- Living Together TestDocument2 pagesLiving Together TestProfu' de biologieNo ratings yet
- SCMHRD SM-1Document43 pagesSCMHRD SM-1ShivanirahejaNo ratings yet
- Kelley DavisDocument3 pagesKelley Davisapi-626701108No ratings yet
- Basic Load (Individual) Veterinarian Field PackDocument3 pagesBasic Load (Individual) Veterinarian Field PackJohn MillerNo ratings yet
- Albert Einstein - Wikipedia, The Free EncyclopediaDocument34 pagesAlbert Einstein - Wikipedia, The Free EncyclopediaalhanunNo ratings yet
- VLSI Implementation of Floating Point AdderDocument46 pagesVLSI Implementation of Floating Point AdderParamesh Waran100% (1)
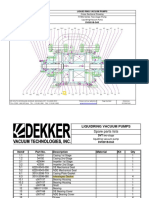
- Bomba de Vacio Part ListDocument2 pagesBomba de Vacio Part ListNayeli Zarate MNo ratings yet
- Toyota Genuine ATF WSDocument14 pagesToyota Genuine ATF WSKirillNo ratings yet
- My Demo DemoDocument19 pagesMy Demo DemoAlex LopezNo ratings yet
- How To Critique A Photograph - Facebook PDFDocument1 pageHow To Critique A Photograph - Facebook PDFpeterNo ratings yet
- Swype ReportDocument8 pagesSwype ReportNagarjuna ReddyNo ratings yet
- SOP 01 Criteria For Donor SelectionDocument9 pagesSOP 01 Criteria For Donor Selectionهشام الشهيميNo ratings yet
- MPMC All Questions and AnswerDocument6 pagesMPMC All Questions and AnswerMODERN TELUGAMMAYINo ratings yet