You might also like
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- An innovative wind-solar street light prototypeDocument10 pagesAn innovative wind-solar street light prototypeMusrady Mulyadi, S.ST., M.T. D3 Teknik Konversi energiNo ratings yet
- PV-Vortex Blade-Less Wind Hybrid System Based Cuckoo Search Maximum Power Point Tracking AlgorithmDocument8 pagesPV-Vortex Blade-Less Wind Hybrid System Based Cuckoo Search Maximum Power Point Tracking Algorithm13.ธนดล กองธรรมNo ratings yet
- AES CEP ReportDocument10 pagesAES CEP ReportMoiz AhmedNo ratings yet
- Multi Rotor Wind Mill Power Generation: AbstractDocument32 pagesMulti Rotor Wind Mill Power Generation: AbstractAnonymous j0aO95fgNo ratings yet
- Modeling of Wind Turbines Based On DFIGDocument8 pagesModeling of Wind Turbines Based On DFIGAida AdylbekovaNo ratings yet
- Igec 2014Document6 pagesIgec 2014Khairul MuzammilNo ratings yet
- A-Holistic-Approach-for-Low-Cost-Heliostat-Fields_2015_Energy-ProcediaDocument10 pagesA-Holistic-Approach-for-Low-Cost-Heliostat-Fields_2015_Energy-Procediapaween saetaeNo ratings yet
- Dynamic Models of Wind Farms For Power System Studies - Status by IEA Wind R&D Annex 21Document8 pagesDynamic Models of Wind Farms For Power System Studies - Status by IEA Wind R&D Annex 21ajitborseNo ratings yet
- ENLILDocument8 pagesENLILnayenzaman6No ratings yet
- Aparna Published Paper EndDocument10 pagesAparna Published Paper Endshubham muraiNo ratings yet
- Drag WT 2Document16 pagesDrag WT 2Subhash JhurawatNo ratings yet
- Wind Energy SystemsDocument16 pagesWind Energy SystemsMônica BuenoNo ratings yet
- Tradeoff Lucas PDFDocument11 pagesTradeoff Lucas PDFGustavo CunhaNo ratings yet
- Distributed Generation Technologies and BenefitsDocument11 pagesDistributed Generation Technologies and BenefitsKhaled IbrahimNo ratings yet
- Wireless Electric Vehicle Battery Charging System Using PV ArrayDocument9 pagesWireless Electric Vehicle Battery Charging System Using PV ArrayIJRASETPublicationsNo ratings yet
- 11ref PDFDocument4 pages11ref PDFRevuNo ratings yet
- Power Quality Analysis of Distributed Wind Generation SystemsDocument6 pagesPower Quality Analysis of Distributed Wind Generation SystemsCésar Díaz LiberonaNo ratings yet
- PE Power Electronic ConvertersDocument12 pagesPE Power Electronic ConvertersDereje LemmaNo ratings yet
- HE 9124 SánchezDocument6 pagesHE 9124 SánchezMarcelo MolinaNo ratings yet
- Chapter 1 b1Document17 pagesChapter 1 b1Jan ivan AbreganaNo ratings yet
- Generation of Electricity Using Bladeless Wind TurbineDocument5 pagesGeneration of Electricity Using Bladeless Wind TurbineftahNo ratings yet
- Windmill: Power Generation Using Wind EnergyDocument23 pagesWindmill: Power Generation Using Wind EnergyAlok Ranjan PandeyNo ratings yet
- STATCOM and Capacitor Banks in A Fixed-Speed Wind PDFDocument12 pagesSTATCOM and Capacitor Banks in A Fixed-Speed Wind PDFيوسف خضر النسورNo ratings yet
- STATCOM and Capacitor Banks in A Fixed-Speed Wind PDFDocument12 pagesSTATCOM and Capacitor Banks in A Fixed-Speed Wind PDFيوسف خضر النسورNo ratings yet
- Power Convertersfor Wind TurbinesDocument14 pagesPower Convertersfor Wind Turbinessteinman1No ratings yet
- Crowbar System in Doubly Fed Induction Wind GeneratorsDocument16 pagesCrowbar System in Doubly Fed Induction Wind GeneratorsMark MassaNo ratings yet
- STATCOM and Capacitor Banks in A Fixed Speed Wind Farm 2014 Energy ProcediaDocument11 pagesSTATCOM and Capacitor Banks in A Fixed Speed Wind Farm 2014 Energy Procediakrit_kasemNo ratings yet
- Modified Algorithm For Drift Avoidance in PV System Using Neural NetworkDocument6 pagesModified Algorithm For Drift Avoidance in PV System Using Neural NetworkIIR indiaNo ratings yet
- Wand Hare 2015Document11 pagesWand Hare 2015niranjan_meharNo ratings yet
- Synchronverters: Inverters That Mimic Synchronous GeneratorsDocument9 pagesSynchronverters: Inverters That Mimic Synchronous GeneratorsqhuncepuNo ratings yet
- Chapter 1Document72 pagesChapter 1sunilkumareceNo ratings yet
- Dynamic Model and Simulation of Wind Energy Conversion System Based On Permanent Magnet Synchronous GeneratorDocument9 pagesDynamic Model and Simulation of Wind Energy Conversion System Based On Permanent Magnet Synchronous Generatorwinggi arafanaldyNo ratings yet
- Economic viability of floating solar powerDocument12 pagesEconomic viability of floating solar powerManna PintoNo ratings yet
- Chen2009 PDFDocument17 pagesChen2009 PDFKIREETINo ratings yet
- Supervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyDocument8 pagesSupervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyMelissa MillerNo ratings yet
- Analysis of Output DC Current Injection in 100kW Grid Connected VACON 8000 Solar InverterDocument4 pagesAnalysis of Output DC Current Injection in 100kW Grid Connected VACON 8000 Solar InverteriaetsdiaetsdNo ratings yet
- Maglev Wind Mill ReportDocument24 pagesMaglev Wind Mill ReportBalu MahendarNo ratings yet
- Properties of Low Speed Generator For VAWT Using Passive Spring TransmissionDocument8 pagesProperties of Low Speed Generator For VAWT Using Passive Spring TransmissionUsername4653No ratings yet
- IEEE 2010 McMillanDocument8 pagesIEEE 2010 McMillandavemcmillan5259No ratings yet
- ConditioningDocument5 pagesConditioningBogdan MondocNo ratings yet
- Arc Faults in Photovoltaic SystemsDocument7 pagesArc Faults in Photovoltaic SystemsincobarNo ratings yet
- 1.1 History of Bladeless Power GenerationDocument12 pages1.1 History of Bladeless Power GenerationRahul TiwariNo ratings yet
- Solar Wind Hybrid SystemDocument13 pagesSolar Wind Hybrid Systemanon_485825334100% (3)
- TurbochargerDocument24 pagesTurbochargerVulebg VukoicNo ratings yet
- Vertical Axis Wind Solar Hybrid Power System ReviewDocument7 pagesVertical Axis Wind Solar Hybrid Power System ReviewshamNo ratings yet
- Abhay ReportDocument46 pagesAbhay ReportAnuj TripathiNo ratings yet
- A Novel Single-Stage Single-Phase Reconfigurable Inverter Topology For A Solar Powered Hybrid AC/DC HomeDocument9 pagesA Novel Single-Stage Single-Phase Reconfigurable Inverter Topology For A Solar Powered Hybrid AC/DC HomeTANVIR MAHMUD MAHIMNo ratings yet
- Modelling and Simulation of Solar PV andDocument5 pagesModelling and Simulation of Solar PV andkalimi.chalapathirao999No ratings yet
- Wind TurbinethesispdfDocument6 pagesWind TurbinethesispdfWhatAreTheBestPaperWritingServicesUK100% (2)
- A Condensed Introduction To The Doubly Fed InductiDocument18 pagesA Condensed Introduction To The Doubly Fed InductiMuhammad SiddiqueNo ratings yet
- GSava RRST 3 2019 PP 229-234Document6 pagesGSava RRST 3 2019 PP 229-234Tarak BenslimaneNo ratings yet
- Instructions Advances Mihet 2010Document5 pagesInstructions Advances Mihet 2010Cư Trần MinhNo ratings yet
- Cal Poly Pomona's Rooftop Solar Thermal SystemDocument5 pagesCal Poly Pomona's Rooftop Solar Thermal SystemAnonymous dEfIaUNo ratings yet
- Energies: FPGA-Based Controller For A Hybrid Grid-Connected PV/Wind/Battery Power System With AC LoadDocument17 pagesEnergies: FPGA-Based Controller For A Hybrid Grid-Connected PV/Wind/Battery Power System With AC LoadmohanNo ratings yet
- Power Electronics for Renewable Energy IntegrationDocument110 pagesPower Electronics for Renewable Energy Integration조용규100% (1)
- J Mset 2019 07 002Document13 pagesJ Mset 2019 07 002varshaNo ratings yet
- Design and Fabrication of Exhaust Gas Heat Recovery Power Generation SystemDocument7 pagesDesign and Fabrication of Exhaust Gas Heat Recovery Power Generation SystemIJRASETPublicationsNo ratings yet
- Overview of Different Wind Generator Systems and Their ComparisonsDocument16 pagesOverview of Different Wind Generator Systems and Their ComparisonsAnonymous zfmlsb2GjANo ratings yet
- Cyclone Resistant Building Architecture PDFDocument22 pagesCyclone Resistant Building Architecture PDFFelipe BarradasNo ratings yet
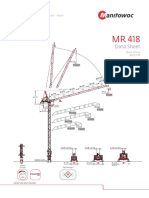
- MR418-FEM-Top Slewing Tower Cranes Imperial PDFDocument8 pagesMR418-FEM-Top Slewing Tower Cranes Imperial PDFCompass equipmentNo ratings yet
- Terrock CMPDI 1Document112 pagesTerrock CMPDI 1rohit ThakurNo ratings yet
- SCX800E Workshop Manual WRHRE0-EN-00Document436 pagesSCX800E Workshop Manual WRHRE0-EN-00Syakur75% (4)
- ASHRAE-77 - Calculation of Wind & Stack Effect Infiltration in Tall BldgsDocument17 pagesASHRAE-77 - Calculation of Wind & Stack Effect Infiltration in Tall BldgsArun MaliNo ratings yet
- Monitoring Small Wind Turbine PerformanceDocument82 pagesMonitoring Small Wind Turbine PerformanceTosetoese MparavazaNo ratings yet
- Lab Sheet For IESL Students Lab 3Document4 pagesLab Sheet For IESL Students Lab 3TharakaKaushalya100% (2)
- Wind Speed Comparisons - Structural Engineering General DiscussionDocument4 pagesWind Speed Comparisons - Structural Engineering General DiscussionAli MaherNo ratings yet
- Lesson 5 Lesson PlanDocument3 pagesLesson 5 Lesson Planapi-382241098No ratings yet
- Anemometer HTC AVM07Document1 pageAnemometer HTC AVM07industrialindiaNo ratings yet
- Designing For Tornados PDFDocument1 pageDesigning For Tornados PDFHyunkyoun JinNo ratings yet
- Comparison of Analytical Methods For Calculation of Wind LoadsDocument66 pagesComparison of Analytical Methods For Calculation of Wind LoadsJImmy NasutionNo ratings yet
- CFAST SampleDocument112 pagesCFAST SampleReinhart85No ratings yet
- Asce Wind Load CalcDocument24 pagesAsce Wind Load CalcSelva kumarNo ratings yet
- Determination of Wind Loads by Bs en 1991-1-4:2005 Supported by Uk National AnnexDocument46 pagesDetermination of Wind Loads by Bs en 1991-1-4:2005 Supported by Uk National AnnexAbel BerhanmeskelNo ratings yet
- Atmospheric Pressure Impacts UHF Radio SignalsDocument4 pagesAtmospheric Pressure Impacts UHF Radio SignalsAsitha Deshapriya DisanayakeNo ratings yet
- Wind Load Calculation for Pipe Bridge StructureDocument21 pagesWind Load Calculation for Pipe Bridge Structuresinu_emailNo ratings yet
- A Proposed New Mabuhay Maritime Express Jetty Port ReminalDocument21 pagesA Proposed New Mabuhay Maritime Express Jetty Port ReminalJester Montalbo GallanoNo ratings yet
- VENT TIP SIZINGDocument6 pagesVENT TIP SIZINGPeddy Nesa0% (1)
- Standardization of Wind Loading For Buildings and Bridges in ChinaDocument11 pagesStandardization of Wind Loading For Buildings and Bridges in ChinaPalani RNo ratings yet
- Articulo 21Document6 pagesArticulo 21Juan ApzNo ratings yet
- Hugh L Dryden and George C Hill Wind Pressure On Circular Cylinders and Chimneys PDFDocument54 pagesHugh L Dryden and George C Hill Wind Pressure On Circular Cylinders and Chimneys PDFaskcmiitmNo ratings yet
- Mean and Fluctuating Wind Loads On Rough and Smooth Parabolic DomesDocument17 pagesMean and Fluctuating Wind Loads On Rough and Smooth Parabolic DomesMarco CamposNo ratings yet
- TXFS-2 digital anemometerDocument1 pageTXFS-2 digital anemometerbaraa alkhabbazNo ratings yet
- Design Loads for BridgesDocument22 pagesDesign Loads for Bridgesaecom2009No ratings yet
- Interpret weather using synoptic chartsDocument6 pagesInterpret weather using synoptic chartsKen CellesNo ratings yet
- 1691 Workbook Atmospheric Dispersion Estimates 1971Document92 pages1691 Workbook Atmospheric Dispersion Estimates 1971santhoshneo02@gmail.com0% (1)
- Proprietary & Confidential: PM AuthorisationDocument55 pagesProprietary & Confidential: PM AuthorisationMuhammad Najam AbbasNo ratings yet
- Anemometers D 5096 - 02 - RDUWOTYDocument5 pagesAnemometers D 5096 - 02 - RDUWOTYebyjoyNo ratings yet
- Wind Effect On StructuresDocument73 pagesWind Effect On StructuresKy TaNo ratings yet