You might also like
- IDMS Application ProgrammingDocument67 pagesIDMS Application ProgrammingArun Jose100% (2)
- Assembly of Computer RubricDocument2 pagesAssembly of Computer Rubricrezhablo100% (3)
- ByteByteGo LinkedIn PDFDocument40 pagesByteByteGo LinkedIn PDFMOHAMED HOUSNINo ratings yet
- PHP Security, Part 2: John CoggeshallDocument5 pagesPHP Security, Part 2: John Coggeshallhungnq1989No ratings yet
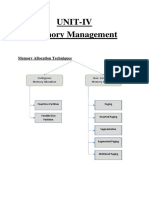
- Memory ManagementDocument22 pagesMemory Managementyogitapatilx12No ratings yet
- Analysis of Allocation Algorithms in Memory ManagementDocument3 pagesAnalysis of Allocation Algorithms in Memory ManagementEditor IJTSRDNo ratings yet
- OS Chapter III Memory ManagementDocument9 pagesOS Chapter III Memory Managementchalie tarekegnNo ratings yet
- F74505D816019220150Document2 pagesF74505D816019220150Alaa Ahmed Mamdouh ZakariyaNo ratings yet
- Lect 6 OSDocument28 pagesLect 6 OSChogeNo ratings yet
- MemoryAbstractionDocument23 pagesMemoryAbstractionTu TuNo ratings yet
- OS Chapter ThreeDocument9 pagesOS Chapter Threejan luNo ratings yet
- Chapter4-Memory ManagementDocument35 pagesChapter4-Memory ManagementPrathameshNo ratings yet
- Buddy Memory AllocationDocument3 pagesBuddy Memory AllocationBibek GuptaNo ratings yet
- Unit V Memory MGMTDocument52 pagesUnit V Memory MGMTrhythm -No ratings yet
- OS 5 Memory ManagementDocument24 pagesOS 5 Memory ManagementRitesh KumarNo ratings yet
- OSY MicroprojectDocument15 pagesOSY MicroprojectAtharva ChourikarNo ratings yet
- Contigious Memory AllocationDocument11 pagesContigious Memory Allocationsindhujaa kNo ratings yet
- ch8 - Memory ManagementDocument53 pagesch8 - Memory ManagementHeval TariQNo ratings yet
- Memory Management: ProtectionDocument6 pagesMemory Management: ProtectionAdegoke BestmanNo ratings yet
- Assignment 4 LPDocument8 pagesAssignment 4 LPPreet HundalNo ratings yet
- Main Memory: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionDocument60 pagesMain Memory: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionAakashNo ratings yet
- Unit 4Document34 pagesUnit 4Naveen KumarNo ratings yet
- Swapping:: Operating Systems II - 4'th Stage-Lecture 6 Lecturer: Hawraa ShareefDocument4 pagesSwapping:: Operating Systems II - 4'th Stage-Lecture 6 Lecturer: Hawraa ShareefAnandu ChickuNo ratings yet
- Lecture 5 - Memory ManagementDocument47 pagesLecture 5 - Memory Managementsamwel sittaNo ratings yet
- MemoryManagement PDFDocument51 pagesMemoryManagement PDFrambabu mahatoNo ratings yet
- Partition Allocation AlgoDocument6 pagesPartition Allocation AlgoSakshi DobhalNo ratings yet
- UNIT 4 Memory ManagementDocument31 pagesUNIT 4 Memory ManagementMohit SharmaNo ratings yet
- Aos Assignments4Document10 pagesAos Assignments4DevendraNo ratings yet
- Topic 2 Part 1Document32 pagesTopic 2 Part 1Amirul AdamNo ratings yet
- Process (Program in Execution) : Double ClickingDocument14 pagesProcess (Program in Execution) : Double ClickingAakash KaushikNo ratings yet
- Unit-3 (OS)Document36 pagesUnit-3 (OS)rishi reddyNo ratings yet
- Operating System: Prof. Vibhuti Patel, Assistant ProfessorDocument47 pagesOperating System: Prof. Vibhuti Patel, Assistant ProfessorBijal patelNo ratings yet
- OS Unit-3Document13 pagesOS Unit-3Madhu SudhanNo ratings yet
- 4.3 Contiguous Memory AllocationDocument3 pages4.3 Contiguous Memory Allocationmadhurivithanala07No ratings yet
- Fixed Dynamic Mem Management DSBDocument28 pagesFixed Dynamic Mem Management DSBPranav KasliwalNo ratings yet
- CS 241 Section Week #9 (04/09/09)Document85 pagesCS 241 Section Week #9 (04/09/09)abel bahiruNo ratings yet
- Lec 12Document22 pagesLec 122.8M viewsNo ratings yet
- Contiguous Memory AllocationDocument5 pagesContiguous Memory AllocationAltab AdditionalNo ratings yet
- c06 MemoryDocument86 pagesc06 MemoryNAjibNo ratings yet
- Allocating Kernel Memory (Buddy System and Slab System)Document8 pagesAllocating Kernel Memory (Buddy System and Slab System)Danny MweeneNo ratings yet
- Monoprogramming Without Swapping & Paging: Memory ManagementDocument21 pagesMonoprogramming Without Swapping & Paging: Memory Managementsrijan consultancyNo ratings yet
- Visualizing Memory Allocation Techniques: G Prajesh Kumar (19bce2175) Sundarakannappan K (19bce2302)Document7 pagesVisualizing Memory Allocation Techniques: G Prajesh Kumar (19bce2175) Sundarakannappan K (19bce2302)Prajesh KumarNo ratings yet
- Myl 12Document26 pagesMyl 12NOR AINI BINTI ISMAIL (PBU)No ratings yet
- Operating Systems (CS/CPE 408) : Memory ManagementDocument8 pagesOperating Systems (CS/CPE 408) : Memory ManagementMCSEANDCCNANo ratings yet
- OS - Lect 5Document43 pagesOS - Lect 5aehab1912No ratings yet
- Ru CS Os 05Document42 pagesRu CS Os 05lutfullahNo ratings yet
- Unit 5 OSDocument50 pagesUnit 5 OSha.ra.d.e.vi.e.rNo ratings yet
- 11 Notes On Memory ManagementDocument16 pages11 Notes On Memory ManagementSupun BanupiyaNo ratings yet
- Memory PartitioningDocument3 pagesMemory PartitioningpNo ratings yet
- Memory ManagementDocument12 pagesMemory ManagementChetan Naik massandNo ratings yet
- Garbage Collection - NetDocument41 pagesGarbage Collection - NetPedroNo ratings yet
- Assignment 05Document6 pagesAssignment 05Dil NawazNo ratings yet
- Memory Management in OSDocument76 pagesMemory Management in OSratanNo ratings yet
- Memory PartitioningDocument2 pagesMemory PartitioningXyzNo ratings yet
- Memory Management PDFDocument21 pagesMemory Management PDFsrijan consultancyNo ratings yet
- Ho Chi Minh University of Technology: Faculty of Computer Science and EngineeringDocument5 pagesHo Chi Minh University of Technology: Faculty of Computer Science and EngineeringHải Vũ HoàngNo ratings yet
- Os 3Document21 pagesOs 3PragyaNo ratings yet
- Memory ManagementDocument134 pagesMemory ManagementHerman KombaNo ratings yet
- Chapter Three: Memory ManagementDocument11 pagesChapter Three: Memory ManagementmehariNo ratings yet
- Memory ManagementDocument42 pagesMemory ManagementmutayebNo ratings yet
- C - Memory ManagementDocument29 pagesC - Memory Managementbalijepalli1986No ratings yet
- Part 2Document2 pagesPart 2Muse Amor OrillaNo ratings yet
- UntitledDocument4 pagesUntitledPiyush PilareNo ratings yet
- UntitledDocument1 pageUntitledPiyush PilareNo ratings yet
- Flat File Process MilestonesDocument4 pagesFlat File Process MilestonesPiyush PilareNo ratings yet
- UntitledDocument1 pageUntitledPiyush PilareNo ratings yet
- Neural NetworkDocument2 pagesNeural NetworkPiyush PilareNo ratings yet
- Project GuideDocument3 pagesProject GuidePiyush PilareNo ratings yet
- Pizza - Customer InfoDocument7 pagesPizza - Customer InfoPiyush PilareNo ratings yet
- Pizza EventDocument344 pagesPizza EventPiyush PilareNo ratings yet
- Pizza CaseDocument88 pagesPizza CasePiyush PilareNo ratings yet
- Build Analyses - Documenting User Reqs and Storyboarding Analysis SheetsDocument5 pagesBuild Analyses - Documenting User Reqs and Storyboarding Analysis SheetsPiyush PilareNo ratings yet
- Datastructure NotesDocument205 pagesDatastructure NotesArmaan PinjariNo ratings yet
- 39c2b070e8a2452 III Year SyllabusDocument59 pages39c2b070e8a2452 III Year SyllabusshellyNo ratings yet
- Autocad - Guide de Personal Is at IonDocument644 pagesAutocad - Guide de Personal Is at Ionyan11122000No ratings yet
- Performance With Easy TierDocument30 pagesPerformance With Easy TierprovenchNo ratings yet
- Training q8 en PDFDocument61 pagesTraining q8 en PDFLuis VargasNo ratings yet
- Teledyne-E2V Medical-Brochure CA v13 AW SPREADS-WebDocument5 pagesTeledyne-E2V Medical-Brochure CA v13 AW SPREADS-WebXUAN HUNo ratings yet
- GBAK Firebird Backup and Restore: General SyntaxDocument4 pagesGBAK Firebird Backup and Restore: General SyntaxAlby MuktionoNo ratings yet
- Compact FlashDocument9 pagesCompact Flashenpr87reddyNo ratings yet
- Simplified Successive-Cancellation List Decoding of Polar CodesDocument22 pagesSimplified Successive-Cancellation List Decoding of Polar Codesnotcor nowNo ratings yet
- Computer Performance Measurement. Amdahl's LawDocument24 pagesComputer Performance Measurement. Amdahl's LawNaski KuafniNo ratings yet
- Byte StuffingDocument2 pagesByte StuffingfyravalNo ratings yet
- 2307882Document116 pages2307882Jimmy McynsNo ratings yet
- Hindustan College of Science and Technology Farah, MathuraDocument34 pagesHindustan College of Science and Technology Farah, MathuraK.D. computerNo ratings yet
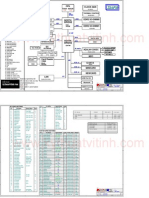
- Asus Z84FMDocument66 pagesAsus Z84FMNicu LiviuNo ratings yet
- Design and Development of Mobile Phone JammerDocument6 pagesDesign and Development of Mobile Phone JammerAJER JOURNALNo ratings yet
- 9061 9062 Fiber Optic Talk Set Spec SheetDocument1 page9061 9062 Fiber Optic Talk Set Spec Sheetosto72No ratings yet
- VOCATIONAL TRAINING ON Flight Reservation APPLICATION PROGRAMMINGDocument71 pagesVOCATIONAL TRAINING ON Flight Reservation APPLICATION PROGRAMMINGDashmesh SinghNo ratings yet
- Job Status ConfigurationDocument7 pagesJob Status ConfigurationanduNo ratings yet
- Success Technology: NPN Silicon TransistorDocument3 pagesSuccess Technology: NPN Silicon TransistoroscarNo ratings yet
- 00 - MANUAL - Vector Network Analyzer (PDFDrive)Document1,017 pages00 - MANUAL - Vector Network Analyzer (PDFDrive)Fernando MartinNo ratings yet
- Samsung LE A656A Firmware UpgrateDocument3 pagesSamsung LE A656A Firmware UpgrateJATGNo ratings yet
- 6410 6415 Stepper Drive Brochure En-Us RevADocument21 pages6410 6415 Stepper Drive Brochure En-Us RevARobney Souza da SilvaNo ratings yet
- Vi Characteristics OF Zener DiodeDocument5 pagesVi Characteristics OF Zener DiodeSIVARAMJINo ratings yet
- Atv310hu75n4e Datasheet SG En-GbDocument6 pagesAtv310hu75n4e Datasheet SG En-Gbkirtiraj gehlotNo ratings yet
- Service Manual: KLV-32L500ADocument58 pagesService Manual: KLV-32L500ASaul Sabath Sandoval Delgado0% (1)
- Arrays and ClassesDocument97 pagesArrays and ClassesCHRISTINE JOY. MOLINANo ratings yet