You might also like
- Hydro Dynamic Induced VibrationDocument10 pagesHydro Dynamic Induced VibrationsunnytouchNo ratings yet
- A Review of Floating Semisubmersible Hull SystemsDocument20 pagesA Review of Floating Semisubmersible Hull SystemsAmenNo ratings yet
- Preliminary Design of A Multi Column TLP Foundation For A 5 MW Offshore Wind Turbine PDFDocument18 pagesPreliminary Design of A Multi Column TLP Foundation For A 5 MW Offshore Wind Turbine PDFhrsimtyzNo ratings yet
- The Consulting Industry and Its Transformations in WordDocument23 pagesThe Consulting Industry and Its Transformations in Wordlei ann magnayeNo ratings yet
- The Fluency Course Teacher Instructions PDFDocument9 pagesThe Fluency Course Teacher Instructions PDFGabriel da RochaNo ratings yet
- Jurnal Offshore Semi SubmersibleDocument16 pagesJurnal Offshore Semi SubmersibleRidzkyNo ratings yet
- A Short History of Denim: (C) Lynn Downey, Levi Strauss & Co. HistorianDocument11 pagesA Short History of Denim: (C) Lynn Downey, Levi Strauss & Co. HistorianBoier Sesh PataNo ratings yet
- A Review On Applications of Tuned Liquid Dampers in Vibration ControlDocument17 pagesA Review On Applications of Tuned Liquid Dampers in Vibration ControlBharadwaj NandaNo ratings yet
- Wits Appraisalnof Jaw Disharmony by JOHNSONDocument20 pagesWits Appraisalnof Jaw Disharmony by JOHNSONDrKamran MominNo ratings yet
- Energies: Preliminary Design of A Multi-Column TLP Foundation For A 5-MW Offshore Wind TurbineDocument18 pagesEnergies: Preliminary Design of A Multi-Column TLP Foundation For A 5-MW Offshore Wind TurbineIrvin AlbertoNo ratings yet
- CSCU Module 08 Securing Online Transactions PDFDocument29 pagesCSCU Module 08 Securing Online Transactions PDFdkdkaNo ratings yet
- Thruster EffectivityDocument190 pagesThruster Effectivityronny-su100% (2)
- Credit Risk ManagementDocument64 pagesCredit Risk Managementcherry_nu100% (12)
- Multi Core Architectures and ProgrammingDocument10 pagesMulti Core Architectures and ProgrammingRIYA GUPTANo ratings yet
- Engineering Structures: SciencedirectDocument18 pagesEngineering Structures: SciencedirectDhirendra Kumar PandeyNo ratings yet
- 2015 ZengDocument22 pages2015 Zengmostafa shahrabiNo ratings yet
- A New Type of Anti-Heave Semi-Submersible Drilling Platform: CHEN Bo, YU Zhiyong, LYU Yong, LI Xiaojian, LI ChunfangDocument8 pagesA New Type of Anti-Heave Semi-Submersible Drilling Platform: CHEN Bo, YU Zhiyong, LYU Yong, LI Xiaojian, LI ChunfangTarmizi RoslanNo ratings yet
- A Parametric Study of Spar-Type Floating Offshore Wind Turbines (Fowts) by Numerical and Experimental InvestigationsDocument16 pagesA Parametric Study of Spar-Type Floating Offshore Wind Turbines (Fowts) by Numerical and Experimental InvestigationsMANMATHAKRISHNAN P oe15d036No ratings yet
- Structure and Infrastructure Engineering: Maintenance, Management, Life-Cycle Design and PerformanceDocument16 pagesStructure and Infrastructure Engineering: Maintenance, Management, Life-Cycle Design and Performancemostafa shahrabiNo ratings yet
- Thesis Linear Motion Analysis of An Offshore Truss Spar Platform For ExternalDocument63 pagesThesis Linear Motion Analysis of An Offshore Truss Spar Platform For ExternalCROSSFIELD ENGINEERING ENERGYNo ratings yet
- 2023 Response Mitigation of Floating Platform by Porous-Media Tuned Liquid DampersDocument15 pages2023 Response Mitigation of Floating Platform by Porous-Media Tuned Liquid DampersTuong BuiNo ratings yet
- Blasting On PipeDocument41 pagesBlasting On PipekometmayorNo ratings yet
- Guidelines On Coupled Analyses of Deepwater Floating SystemsDocument10 pagesGuidelines On Coupled Analyses of Deepwater Floating SystemsTee Shi FengNo ratings yet
- Buchner (2007) Extreme Wave Effects On Deepwater Floating StructuresDocument10 pagesBuchner (2007) Extreme Wave Effects On Deepwater Floating StructureskometmayorNo ratings yet
- Dynamics and Control of Spar-Type Floating Offshore Wind Turbines With Tuned Liquid Column DampersDocument25 pagesDynamics and Control of Spar-Type Floating Offshore Wind Turbines With Tuned Liquid Column DampersDhirendra Kumar PandeyNo ratings yet
- A New Concept of Jackup Combined Semisubmersible MDocument10 pagesA New Concept of Jackup Combined Semisubmersible MKerim İlgin ERTAŞNo ratings yet
- Minerals 11 00031Document19 pagesMinerals 11 0003122-081Fahmi SyaifullahNo ratings yet
- Technical Note: Archive of SIDDocument10 pagesTechnical Note: Archive of SIDAhsan LatifNo ratings yet
- Patil-Singh2016 Article EvaluationOfSlopedBottomTunedLDocument10 pagesPatil-Singh2016 Article EvaluationOfSlopedBottomTunedLG R PatilNo ratings yet
- Experimental and Analytical Investigation For TheDocument7 pagesExperimental and Analytical Investigation For TheKeith DixonNo ratings yet
- Fulltext PDFDocument164 pagesFulltext PDFHanzil HakeemNo ratings yet
- Hydrodynamic Analysis of A Semi-Submersible Wind-Tidal Combined Power Generation DeviceDocument10 pagesHydrodynamic Analysis of A Semi-Submersible Wind-Tidal Combined Power Generation DeviceDr R Panneer SelvamNo ratings yet
- Overview of Tuned Liquid Dampers and Possible Ways of Oscillation Damping Properties ImprovementDocument6 pagesOverview of Tuned Liquid Dampers and Possible Ways of Oscillation Damping Properties Improvementmostafa shahrabiNo ratings yet
- Harsh Vardhan TLD Review PPR EditedDocument7 pagesHarsh Vardhan TLD Review PPR EditedHARSH VARDHAN SINGHNo ratings yet
- Structural Design Tall Build - 2022 - Pandey - A Tuned Liquid Mass Damper Implemented in A Deep Liquid Storage Tank ForDocument22 pagesStructural Design Tall Build - 2022 - Pandey - A Tuned Liquid Mass Damper Implemented in A Deep Liquid Storage Tank Forruining.chengNo ratings yet
- Sliding Mode Control With Mixed Current 20160514-27728-Hui4u6-LibreDocument15 pagesSliding Mode Control With Mixed Current 20160514-27728-Hui4u6-LibreBharathNo ratings yet
- 2012 LouDocument6 pages2012 Loumostafa shahrabiNo ratings yet
- A Review of Effects of Initial and Boundary Conditions On Turbulent Jets, 2010 (H, Region)Document19 pagesA Review of Effects of Initial and Boundary Conditions On Turbulent Jets, 2010 (H, Region)Dong Hyun KimNo ratings yet
- Model of Tuned Liquid Damper For Suppressing Pitching Motions of StructuresDocument12 pagesModel of Tuned Liquid Damper For Suppressing Pitching Motions of StructuresAlejandro OspinaNo ratings yet
- 3 Ee 0Document10 pages3 Ee 0Derlin prince ThankarajNo ratings yet
- CVEN 686 - Tech ProjectDocument4 pagesCVEN 686 - Tech ProjectjayaramrddyNo ratings yet
- Vortex Behaviour of An Unbaffled Surface Aerator PDFDocument6 pagesVortex Behaviour of An Unbaffled Surface Aerator PDFjbsantoNo ratings yet
- Offshore Structures: Classification Considerations & General DesignDocument9 pagesOffshore Structures: Classification Considerations & General DesignChaithra KowshikNo ratings yet
- Aero Elastic Control FloaterDocument13 pagesAero Elastic Control FloaterputhenkulamNo ratings yet
- Recent Advances in Vibration Control of Offshore Platforms: ReviewDocument17 pagesRecent Advances in Vibration Control of Offshore Platforms: ReviewAlain FrancisNo ratings yet
- 1 s2.0 S1738573319301767 MainDocument9 pages1 s2.0 S1738573319301767 MainPremchand V. P.No ratings yet
- Effects of Water Depth, Mooring Line Diameter and Hydrodynamiccoefficients On The Behaviour of Deepwater FPSOsDocument13 pagesEffects of Water Depth, Mooring Line Diameter and Hydrodynamiccoefficients On The Behaviour of Deepwater FPSOsabuNo ratings yet
- Design Selection Analysis For Mooring Positioning System of Deepwater Semi-Submersible PlatformDocument8 pagesDesign Selection Analysis For Mooring Positioning System of Deepwater Semi-Submersible Platformpackya719150% (2)
- Dynamic Analysis of A Braceless Semisubmersible Offshore Wind Turbine in Operational ConditionsDocument9 pagesDynamic Analysis of A Braceless Semisubmersible Offshore Wind Turbine in Operational ConditionsVũ Quý HoàNo ratings yet
- 1 s2.0 014102969592643M MainDocument7 pages1 s2.0 014102969592643M Mainyusep ramdaniNo ratings yet
- FG 1732Document9 pagesFG 1732MechanicmanNo ratings yet
- Ote 4543 Topside Facilities For Floating Production Systems Require Engineering ThinkingDocument10 pagesOte 4543 Topside Facilities For Floating Production Systems Require Engineering Thinkingthlim19078656No ratings yet
- The Slug Suppression System in OperationDocument5 pagesThe Slug Suppression System in Operationmohamadi42No ratings yet
- Basis Design of SemisubDocument6 pagesBasis Design of SemisubMuh. Saeful MHNo ratings yet
- Jmse 09 01093 v2Document17 pagesJmse 09 01093 v2jeremytoh89No ratings yet
- Analisis de Diferentes Perfiles Nrel Riso Naca para HidroturbinasDocument10 pagesAnalisis de Diferentes Perfiles Nrel Riso Naca para HidroturbinasvictoriaNo ratings yet
- An Experimental and Numerical Study of A ThreelobeDocument9 pagesAn Experimental and Numerical Study of A ThreelobeAlex BaciuNo ratings yet
- Tuned Liquid Column Damper For Suppressing Pitching Motion of StructuresDocument14 pagesTuned Liquid Column Damper For Suppressing Pitching Motion of StructuresDhirendra Kumar PandeyNo ratings yet
- Hydrodynamic Characteristics of Twin-Rudders at Small Attack AnglesDocument13 pagesHydrodynamic Characteristics of Twin-Rudders at Small Attack AnglesAriyoshi Daiki SamaNo ratings yet
- Coupled Dynamic Analysis of A Tension Leg Platform Floating Offshore Wind TurbineDocument9 pagesCoupled Dynamic Analysis of A Tension Leg Platform Floating Offshore Wind TurbineStevenNo ratings yet
- Analisis Experimental TLDDocument6 pagesAnalisis Experimental TLDAlberto CornejoNo ratings yet
- Hydrodynamic Characteristics of Twin-Rudders at Small Attack AnglesDocument13 pagesHydrodynamic Characteristics of Twin-Rudders at Small Attack Anglesebey_endunNo ratings yet
- Energies 16 04376Document20 pagesEnergies 16 04376Hoi NguyenNo ratings yet
- Mechanism of Stall and Surge in A Centrifugal Compressor With A Variable Vaned DiffuserDocument10 pagesMechanism of Stall and Surge in A Centrifugal Compressor With A Variable Vaned DiffuserIsmail SakrNo ratings yet
- Indian Standard: Code of Practice For Stability Analysis of Earth DamsDocument41 pagesIndian Standard: Code of Practice For Stability Analysis of Earth DamssantkabirNo ratings yet
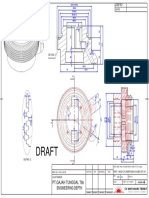
- HEAD CYLINDER BOM 43 AUBO ATC-D1 - DrawingDocument1 pageHEAD CYLINDER BOM 43 AUBO ATC-D1 - Drawingmahera wijaksaraNo ratings yet
- Financial Management and Accounting Fundamentals For Construction - 2009 - Halpin - Appendix C Compound Interest TablesDocument26 pagesFinancial Management and Accounting Fundamentals For Construction - 2009 - Halpin - Appendix C Compound Interest Tablesmahera wijaksaraNo ratings yet
- Bearing SpesificationDocument1 pageBearing Spesificationmahera wijaksaraNo ratings yet
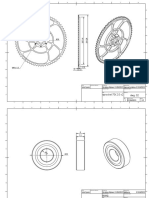
- Sprocket 70T With Bearing SpesificationDocument2 pagesSprocket 70T With Bearing Spesificationmahera wijaksaraNo ratings yet
- API IND DS2 en Excel v2 10081834Document462 pagesAPI IND DS2 en Excel v2 10081834Suvam PatelNo ratings yet
- Conjunctions in SentencesDocument8 pagesConjunctions in SentencesPunitha PoppyNo ratings yet
- Catalogo HydronixDocument68 pagesCatalogo HydronixNANCHO77No ratings yet
- Sinamics g120 BrochureDocument16 pagesSinamics g120 BrochuremihacraciunNo ratings yet
- STRUNK V THE STATE OF CALIFORNIA Etal. NYND 16-cv-1496 (BKS / DJS) OSC WITH TRO Filed 12-15-2016 For 3 Judge Court Electoral College ChallengeDocument1,683 pagesSTRUNK V THE STATE OF CALIFORNIA Etal. NYND 16-cv-1496 (BKS / DJS) OSC WITH TRO Filed 12-15-2016 For 3 Judge Court Electoral College ChallengeChristopher Earl Strunk100% (1)
- CAMEL Model With Detailed Explanations and Proper FormulasDocument4 pagesCAMEL Model With Detailed Explanations and Proper FormulasHarsh AgarwalNo ratings yet
- Commercial BanksDocument11 pagesCommercial BanksSeba MohantyNo ratings yet
- Presentation No. 3 - Songs and ChantsDocument44 pagesPresentation No. 3 - Songs and Chantsandie hinchNo ratings yet
- Encapsulation of Objects and Methods in C++Document46 pagesEncapsulation of Objects and Methods in C++Scott StanleyNo ratings yet
- Hansen Aise Im Ch12Document66 pagesHansen Aise Im Ch12Rizki19maretNo ratings yet
- Laporan Keuangan TRIN Per Juni 2023-FinalDocument123 pagesLaporan Keuangan TRIN Per Juni 2023-FinalAdit RamdhaniNo ratings yet
- Fh84fr6ht GBR EngDocument6 pagesFh84fr6ht GBR EngEsmir ŠkreboNo ratings yet
- Pell (2017) - Trends in Real-Time Traffic SimulationDocument8 pagesPell (2017) - Trends in Real-Time Traffic SimulationJorge OchoaNo ratings yet
- Menara PMB Assessment Criteria Score SummaryDocument2 pagesMenara PMB Assessment Criteria Score SummarySyerifaizal Hj. MustaphaNo ratings yet
- Ezpdf Reader 1 9 8 1Document1 pageEzpdf Reader 1 9 8 1AnthonyNo ratings yet
- Datalogic tl46 A Manual - 230104 - 140343Document2 pagesDatalogic tl46 A Manual - 230104 - 140343Emmanuel Baldenegro PadillaNo ratings yet
- Written Report in Instructional PlanningDocument6 pagesWritten Report in Instructional PlanningRose Aura HerialesNo ratings yet
- Tanque: Equipment Data SheetDocument1 pageTanque: Equipment Data SheetAlonso DIAZNo ratings yet
- 8. Nguyễn Tất Thành- Kon TumDocument17 pages8. Nguyễn Tất Thành- Kon TumK60 TRẦN MINH QUANGNo ratings yet
- B2B Marketing: Chapter-8Document23 pagesB2B Marketing: Chapter-8Saurabh JainNo ratings yet
- Advanced Methods For Complex Network AnalysisDocument2 pagesAdvanced Methods For Complex Network AnalysisCS & ITNo ratings yet
- The Attachment To Woman's Virtue in Abdulrazak Gurnah's Desertion (2005)Document7 pagesThe Attachment To Woman's Virtue in Abdulrazak Gurnah's Desertion (2005)IJELS Research JournalNo ratings yet
- 2 Year Spares List For InstrumentationDocument2 pages2 Year Spares List For Instrumentationgudapati9No ratings yet