You might also like
- "Vironment": An Art of Wearable Social Distancing: Steve Mann, Cayden Pierce, Christopher Tong, Christina MannDocument6 pages"Vironment": An Art of Wearable Social Distancing: Steve Mann, Cayden Pierce, Christopher Tong, Christina MannFlow TVNo ratings yet
- SynopsisDocument8 pagesSynopsisSahil Oberoi100% (1)
- Artificial RealityDocument19 pagesArtificial RealityPrinkle GulatiNo ratings yet
- LE2I Encyc - computerScienceTechnology 2017 MERIENNEDocument12 pagesLE2I Encyc - computerScienceTechnology 2017 MERIENNEDobgima LangsiNo ratings yet
- Immersive Virtual Reality: Innovation Project ReportDocument26 pagesImmersive Virtual Reality: Innovation Project ReportFiqriNo ratings yet
- RSTB 2009 0138 PDFDocument9 pagesRSTB 2009 0138 PDFpriyankaprakasanpNo ratings yet
- VR in Clinical PsychologyDocument16 pagesVR in Clinical PsychologyAngélica RodriguesNo ratings yet
- Virtual Reality ReportDocument16 pagesVirtual Reality Reportmanu6792No ratings yet
- Somaldo 2020Document6 pagesSomaldo 2020velasco rhoweeNo ratings yet
- Pupil Dynamics For Iris Liveness Detection: Adam Czajka, Senior Member, IEEEDocument10 pagesPupil Dynamics For Iris Liveness Detection: Adam Czajka, Senior Member, IEEEJagannath JagguNo ratings yet
- Viewing As A JourneyDocument17 pagesViewing As A JourneypulejusNo ratings yet
- Txt08a AA Virilio Vision MachineDocument11 pagesTxt08a AA Virilio Vision MachineJosé Ribeiro Zé-TóNo ratings yet
- WRAP THESIS Livingston 1998 PDFDocument196 pagesWRAP THESIS Livingston 1998 PDFMario ScorzelliNo ratings yet
- 1 Luciene Bulhões Mattos, IFBA, : Luciene - Bulhoes@yahoo - FR Lueta@Document9 pages1 Luciene Bulhões Mattos, IFBA, : Luciene - Bulhoes@yahoo - FR Lueta@lluettaNo ratings yet
- Wears Ys 2019 KeynoteDocument3 pagesWears Ys 2019 KeynoteFlow TVNo ratings yet
- Clark - Unravelling The Golden BraidDocument9 pagesClark - Unravelling The Golden BraidDavid_Silverma_8933No ratings yet
- Smart Surveillance: Applications, Technologies and ImplicationsDocument6 pagesSmart Surveillance: Applications, Technologies and ImplicationsTagoreNo ratings yet
- HOMERE: A Multimodal System For Visually Impaired People To Explore Virtual EnvironmentsDocument8 pagesHOMERE: A Multimodal System For Visually Impaired People To Explore Virtual EnvironmentsagebsonNo ratings yet
- JETIR2302147Document5 pagesJETIR2302147arvind TttNo ratings yet
- Marin Morales Et Al., 2020-Emotion Recognition in Immersive Virtual Reality - From Statistics To Affective ComputingDocument26 pagesMarin Morales Et Al., 2020-Emotion Recognition in Immersive Virtual Reality - From Statistics To Affective ComputingPrudhvi PulapaNo ratings yet
- Real-World Anomaly Detection in Surveillance VideosDocument10 pagesReal-World Anomaly Detection in Surveillance VideosSomya swarya naikNo ratings yet
- Quan 2015Document5 pagesQuan 2015abdullah almutairiNo ratings yet
- Eth 5638 02Document172 pagesEth 5638 02sathes 2595No ratings yet
- Coils of A SerpentDocument10 pagesCoils of A Serpentkellee0No ratings yet
- The Last Straw To Need of The Cage ( (... ) ) Cave: Author: Luciene Bulhões MattosDocument13 pagesThe Last Straw To Need of The Cage ( (... ) ) Cave: Author: Luciene Bulhões MattoslluettaNo ratings yet
- ManuscriptDocument7 pagesManuscriptIH InanNo ratings yet
- Third Eye: A Shopping Assistant For The Visually Impaired: Cover Feature Cover FeatureDocument9 pagesThird Eye: A Shopping Assistant For The Visually Impaired: Cover Feature Cover FeaturejanorakNo ratings yet
- Ol-A Model and Simulation of Early-StageDocument11 pagesOl-A Model and Simulation of Early-Stageueddy2No ratings yet
- Virtual Reality ReportDocument23 pagesVirtual Reality ReportVardaan Popli100% (1)
- Corporeal Body in VRDocument29 pagesCorporeal Body in VRanamnesis232060No ratings yet
- Laval VirtualDocument3 pagesLaval VirtualPrateek Kumar PandeyNo ratings yet
- Quantum ComputingDocument7 pagesQuantum Computingsid raiNo ratings yet
- Virtual Reality: Bhavna GuptaDocument5 pagesVirtual Reality: Bhavna GuptaIjact EditorNo ratings yet
- Milgram Kishino 1994Document9 pagesMilgram Kishino 1994NenySilviaNurhidayahNo ratings yet
- Reflex Movements For A Virtual Human: A Biology Inspired ApproachDocument10 pagesReflex Movements For A Virtual Human: A Biology Inspired ApproachVignesh RajaNo ratings yet
- AVR Unit 1 Part 1Document70 pagesAVR Unit 1 Part 1Honey BeeNo ratings yet
- Getting Rid of Cybersickness: In Virtual Reality, Augmented Reality, and SimulatorsFrom EverandGetting Rid of Cybersickness: In Virtual Reality, Augmented Reality, and SimulatorsNo ratings yet
- Deception Detection Through Automatic Unobtrusive Analysis of Nonverbal BehaviorDocument8 pagesDeception Detection Through Automatic Unobtrusive Analysis of Nonverbal Behavioranik ghoshNo ratings yet
- ICCBI 2019 Paper 103Document8 pagesICCBI 2019 Paper 103shakuniNo ratings yet
- Human-Centric Machine VisionDocument188 pagesHuman-Centric Machine VisionJosé RamírezNo ratings yet
- A Taxonomy of Mixed Reality Visual DisplaysDocument16 pagesA Taxonomy of Mixed Reality Visual DisplaysElla Mae CastilloNo ratings yet
- tmpA22B TMPDocument16 pagestmpA22B TMPFrontiers0% (1)
- Weneed Invisibility: W Hat Is Invisibility? Extra Inform AtionDocument2 pagesWeneed Invisibility: W Hat Is Invisibility? Extra Inform AtionGarazi MujikaNo ratings yet
- 4.3 Types of Eye MeovementDocument9 pages4.3 Types of Eye MeovementkksNo ratings yet
- 2-Introduction To XR - Virtual RealityDocument21 pages2-Introduction To XR - Virtual RealitycakioNo ratings yet
- Lecture 4 DR M AYAZ SHIRAZI UpdatedDocument95 pagesLecture 4 DR M AYAZ SHIRAZI UpdatedOwais JafriNo ratings yet
- The Efficiency Enhancement in Non Immersive Virtual Reality System by Haptic DevicesDocument5 pagesThe Efficiency Enhancement in Non Immersive Virtual Reality System by Haptic Deviceseditor_ijarcsseNo ratings yet
- Avr Unit1Document27 pagesAvr Unit1Srinu SrinivasNo ratings yet
- Virtual Reality Urban Planning PDFDocument21 pagesVirtual Reality Urban Planning PDFRuxi NeaguNo ratings yet
- An Introduction To Virtual Reality Techn PDFDocument4 pagesAn Introduction To Virtual Reality Techn PDFSebastia RomeroNo ratings yet
- Marketing 3.0: Dr. (Prof.) Philip KotlerDocument9 pagesMarketing 3.0: Dr. (Prof.) Philip KotleroutkastedNo ratings yet
- Is Symbolic Gestural Interaction Better For The Visual Attention?Document6 pagesIs Symbolic Gestural Interaction Better For The Visual Attention?Dita MarthaNo ratings yet
- Virtual RealityDocument26 pagesVirtual RealityAb Mff MffNo ratings yet
- Technical Model-Main ReportDocument21 pagesTechnical Model-Main Reportsravan kumarNo ratings yet
- The Ultimate Tool of Persuasion FTC Rosenberg With LetterDocument10 pagesThe Ultimate Tool of Persuasion FTC Rosenberg With LetterHaitham YousefNo ratings yet
- Imouse: An Integrated Mobile Surveillance and Wireless Sensor SystemDocument7 pagesImouse: An Integrated Mobile Surveillance and Wireless Sensor SystemR YESWANTH KUMARNo ratings yet
- An Icon 01 Conte WiesingDocument20 pagesAn Icon 01 Conte WiesingCecilia HernándezNo ratings yet
- A Taxonomy of Mixed Reality Visual DisplaysDocument16 pagesA Taxonomy of Mixed Reality Visual DisplaysFernando Alberto Velasquez AguileraNo ratings yet
- Advance Interaction TechnologiesDocument22 pagesAdvance Interaction TechnologiesrickNo ratings yet
- EnkiDocument5 pagesEnkiTom RyderNo ratings yet
- JFHGDJFHGDocument5 pagesJFHGDJFHGTom RyderNo ratings yet
- Interactive ACK Character Sheet by Rocco Aka BAMFDocument5 pagesInteractive ACK Character Sheet by Rocco Aka BAMFTom RyderNo ratings yet
- Equipment TableDocument5 pagesEquipment TableTom RyderNo ratings yet
- STR HP INT WIS DEX AC CON CHR: AttributesDocument5 pagesSTR HP INT WIS DEX AC CON CHR: AttributesTom RyderNo ratings yet
- Remote Viewing Training Manual - Stanford Research InstituteDocument56 pagesRemote Viewing Training Manual - Stanford Research Institutema2003rkNo ratings yet
- 22 - 26 Maxwells Equations and Electromagnetic WavesDocument43 pages22 - 26 Maxwells Equations and Electromagnetic WavesLikhithapNo ratings yet
- Chapter 2Document15 pagesChapter 2kingstonNo ratings yet
- Mechanical Waves2Document29 pagesMechanical Waves2Dennis ANo ratings yet
- Applied Physics R20 - Unit-3 (Ref-3)Document20 pagesApplied Physics R20 - Unit-3 (Ref-3)Madivala NandeeshwarNo ratings yet
- Electromagnetic Theory (EMT)Document7 pagesElectromagnetic Theory (EMT)Sudalai MadanNo ratings yet
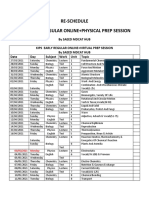
- Reschedule Kips Early PrepDocument16 pagesReschedule Kips Early PrepbilalNo ratings yet
- LS Dyna - Response SpectraDocument12 pagesLS Dyna - Response SpectraAnonymous wWOWz9UnWNo ratings yet
- Dattu Joshi - Engineering Physics (CC 110011) Common For All Engineering Branches-McGraw-Hill Education (2011)Document291 pagesDattu Joshi - Engineering Physics (CC 110011) Common For All Engineering Branches-McGraw-Hill Education (2011)Deepak SwainNo ratings yet
- Applications of Waves in Your Everyday LifeDocument2 pagesApplications of Waves in Your Everyday LifeKogilan Bama DavenNo ratings yet
- Booklet-Understanding Infrared HeatingDocument70 pagesBooklet-Understanding Infrared Heatingmarin_vrkic100% (3)
- Awasys 7 User Manual: by Palle Meinert Thomas Lykke Andersen Peter FrigaardDocument67 pagesAwasys 7 User Manual: by Palle Meinert Thomas Lykke Andersen Peter FrigaardMiguel J Cosgaya CahuichNo ratings yet
- Meditations of Maharishi Mahesh YogiDocument192 pagesMeditations of Maharishi Mahesh Yogikpn1967112935100% (7)
- Pieas 2015Document7 pagesPieas 2015Xaadi ChNo ratings yet
- Ch. 6 The Impulse-Momentum PrincipleDocument35 pagesCh. 6 The Impulse-Momentum Principletony starkNo ratings yet
- Scope Grades 10 & 11 (Final Exams November 2023)Document2 pagesScope Grades 10 & 11 (Final Exams November 2023)ariananaidoo24No ratings yet
- Effective Non-Reflective Boundary For Lamb Waves - TheoryDocument20 pagesEffective Non-Reflective Boundary For Lamb Waves - TheoryHiram RoblesNo ratings yet
- 6.1.07 Ra Music Write UpDocument40 pages6.1.07 Ra Music Write Updanobikwelu_scribd100% (1)
- Antigravity Insect Original BookDocument41 pagesAntigravity Insect Original Bookplan2222100% (2)
- Knutsson, M. - IC Engine Intake Noise PredictionsDocument120 pagesKnutsson, M. - IC Engine Intake Noise PredictionsThomas MouraNo ratings yet
- MPS (Third Quarter) Science 7-10Document5 pagesMPS (Third Quarter) Science 7-10Leonardo C. AcostaNo ratings yet
- Science Notes KS3 Part 2Document8 pagesScience Notes KS3 Part 2lamcass37No ratings yet
- Solutions To The Problems of The Theoretical CompetitionDocument16 pagesSolutions To The Problems of The Theoretical CompetitionDejan DjokićNo ratings yet
- Transportation of Detritus by Moving WaterDocument27 pagesTransportation of Detritus by Moving WatergeoecologistNo ratings yet
- Manipal Institute of Technology: Subject: Engineering Physics (Phy101/102) Time: 3 Hrs. Max. Marks: 50Document6 pagesManipal Institute of Technology: Subject: Engineering Physics (Phy101/102) Time: 3 Hrs. Max. Marks: 50Chhayank AnkurNo ratings yet
- Manual 9d Nls Vector SpecialisDocument65 pagesManual 9d Nls Vector SpecialisElenaLauder100% (1)
- Quantum Mechanics - Britannica Online Encyclopedia PDFDocument29 pagesQuantum Mechanics - Britannica Online Encyclopedia PDFMahesh MaheshwariNo ratings yet
- 2015 BT Design ShuklaDocument55 pages2015 BT Design ShuklaAli SalehNo ratings yet
- Waves, Oscillations & Optics - DPP 01 (Of Lec 02) - Saakaar Batch For IIT JAM PhysicsDocument4 pagesWaves, Oscillations & Optics - DPP 01 (Of Lec 02) - Saakaar Batch For IIT JAM PhysicsShahnawaz AnsariNo ratings yet
- BE ECE Scheme & Syllabus 2017Document152 pagesBE ECE Scheme & Syllabus 2017Kenny SNo ratings yet