You might also like
- Facility Management 1st LectureDocument10 pagesFacility Management 1st LectureShinjiNo ratings yet
- Examples of Instructional MaterialsDocument4 pagesExamples of Instructional MaterialsFeelin YepNo ratings yet
- Jose Rizal University Business Plan m11j 11Document13 pagesJose Rizal University Business Plan m11j 11Jholo Bolaños100% (2)
- Sustainable Architecture Topic-Sustainable MaterialsDocument9 pagesSustainable Architecture Topic-Sustainable MaterialsADITYANo ratings yet
- DLL DRRRDocument3 pagesDLL DRRRRenier Dela Vega FloresNo ratings yet
- SGLG For BarangayDocument15 pagesSGLG For BarangayMike GuerzonNo ratings yet
- Chemical Reaction Engineering 40 L CSTR SaponificationDocument21 pagesChemical Reaction Engineering 40 L CSTR SaponificationMohamad Turmizi Jaafar67% (3)
- Continuous Stirred Tank Reactor: CHEN-410 Unit Operation LabDocument34 pagesContinuous Stirred Tank Reactor: CHEN-410 Unit Operation LabMohamad Abou DaherNo ratings yet
- Dunning Objects ListsDocument1 pageDunning Objects ListsSachin SinghNo ratings yet
- DLL G6 Q3 WEEK 1 (Mam Inkay Peralta)Document53 pagesDLL G6 Q3 WEEK 1 (Mam Inkay Peralta)She Mark Ghelbert Salonga100% (1)
- WEEK 8 MODULE 8 - Feedback Control SystemsDocument33 pagesWEEK 8 MODULE 8 - Feedback Control SystemsAdekoya IfeoluwaNo ratings yet
- Sona College of Technology: Department of Mechatronics EngineeringDocument41 pagesSona College of Technology: Department of Mechatronics EngineeringKanishk KannaNo ratings yet
- Mid SMR23 SRDocument7 pagesMid SMR23 SR22p0294No ratings yet
- Semester - 3: Chemical EngineeringDocument135 pagesSemester - 3: Chemical EngineeringKevinNo ratings yet
- AICTE Model Curriculum Scheme2020-2021 - 06.02.2021Document55 pagesAICTE Model Curriculum Scheme2020-2021 - 06.02.2021Deedad SaleemNo ratings yet
- CHT302 - Ktu QbankDocument8 pagesCHT302 - Ktu Qbanknaagin12300No ratings yet
- Design and Test of Pneumatic SystemsDocument11 pagesDesign and Test of Pneumatic SystemsADIL RASHIDNo ratings yet
- Mathematical Model of Control Valves of Three-Tank System: Petr Chalupa, Jakub Novák, Vladimír BobálDocument8 pagesMathematical Model of Control Valves of Three-Tank System: Petr Chalupa, Jakub Novák, Vladimír BobálMobiLegen Yang Penting MaenNo ratings yet
- Dynamic Model of CondenserDocument10 pagesDynamic Model of CondenserJung Kyung WooNo ratings yet
- CHEMICAL ENGINEERING 2019 Scheme S4 Syllabus Ktustudents - inDocument88 pagesCHEMICAL ENGINEERING 2019 Scheme S4 Syllabus Ktustudents - inJOSEPH SABU 190782No ratings yet
- Automobile SyllabusDocument157 pagesAutomobile SyllabussolomonrajarNo ratings yet
- BE MechanicalDocument162 pagesBE Mechanicalsatish kurraNo ratings yet
- Hydraulic Engineering LaboratoryDocument2 pagesHydraulic Engineering LaboratoryVijay A HwreNo ratings yet
- Liuqingyou Gas LiftDocument7 pagesLiuqingyou Gas Liftwmpstl3582No ratings yet
- Anti Vortex DeviceDocument12 pagesAnti Vortex DeviceVipin JoseNo ratings yet
- Fluid Mechanics & Machinery LabDocument3 pagesFluid Mechanics & Machinery Labraghav dhamaniNo ratings yet
- At345 Quality Control and Reliability EngineeringDocument3 pagesAt345 Quality Control and Reliability EngineeringRacherla Mega RaniNo ratings yet
- Mechanical Design Optimization of A Piping Inspection Robot: Damien Chablat, Swaminath Venkateswaran, Frédéric BoyerDocument11 pagesMechanical Design Optimization of A Piping Inspection Robot: Damien Chablat, Swaminath Venkateswaran, Frédéric BoyerAnees Ur RehmanNo ratings yet
- BTT304 - Ktu QbankDocument9 pagesBTT304 - Ktu QbankAnn JohnNo ratings yet
- 12 Marin Rares LucianDocument8 pages12 Marin Rares LuciansharunnizamNo ratings yet
- Civil Engineering PDFDocument21 pagesCivil Engineering PDFNitish ShabirNo ratings yet
- SPE 125959 Reservoir Simulation and Uncertainty Analysis of Enhanced CBM Production Using Artificial Neural NetworksDocument9 pagesSPE 125959 Reservoir Simulation and Uncertainty Analysis of Enhanced CBM Production Using Artificial Neural NetworksUrmi AkterNo ratings yet
- BE Chemical 2010 PDFDocument58 pagesBE Chemical 2010 PDFShriram TodkarNo ratings yet
- 10132Document10 pages10132dramsree1No ratings yet
- Cuello de Botella Flow Shop3Document4 pagesCuello de Botella Flow Shop3EdiSon JimenezNo ratings yet
- Design of An Optimized Enzyme Catalysed Batch Bioreactor For The Production of Ethanol From CornDocument8 pagesDesign of An Optimized Enzyme Catalysed Batch Bioreactor For The Production of Ethanol From CornAJER JOURNALNo ratings yet
- Integrating Measurement Instruments in Pneumatic Lab ActivitiesDocument9 pagesIntegrating Measurement Instruments in Pneumatic Lab ActivitiesMuftah AhmedNo ratings yet
- Reaction Lab Exp#1Document13 pagesReaction Lab Exp#1Muataman KhNo ratings yet
- Design and Development of Pneumatic Lab Activities For A Course On Fluid PowerDocument35 pagesDesign and Development of Pneumatic Lab Activities For A Course On Fluid PowerKhaled MahranNo ratings yet
- University of JaffnaDocument9 pagesUniversity of JaffnaRushanth ChandraboseNo ratings yet
- Bms College of Engineering, BengaluruDocument2 pagesBms College of Engineering, BengaluruShiva Kumar RamachandraNo ratings yet
- 3B SyabusDocument2 pages3B SyabusSHIJONo ratings yet
- Unit 1Document2 pagesUnit 1Dikul BrahmbhattNo ratings yet
- 18ME55Document2 pages18ME55Praveen DNo ratings yet
- Scheme of Instruction & Examination B.E. V - Semester (Mechanical Engineering)Document20 pagesScheme of Instruction & Examination B.E. V - Semester (Mechanical Engineering)Mohammed ShoaebNo ratings yet
- Laboratory Manual MS Sem VDocument32 pagesLaboratory Manual MS Sem VSamriddha Das GuptaNo ratings yet
- PSG College of Technology, Coimbatore - 641 004 Semester Examinations, SemesterDocument3 pagesPSG College of Technology, Coimbatore - 641 004 Semester Examinations, SemesterBabitha DhanaNo ratings yet
- 1 s2.0 S0042207X15000020 MainDocument12 pages1 s2.0 S0042207X15000020 MainMihaela ConstantinNo ratings yet
- Dhar Anuj - India 39 S Biggest Cover-Up 2012 AnujDocument49 pagesDhar Anuj - India 39 S Biggest Cover-Up 2012 AnujAbhishek PaloNo ratings yet
- Research Article: Appropriate Separator Sizing: A Modified Stewart and Arnold MethodDocument4 pagesResearch Article: Appropriate Separator Sizing: A Modified Stewart and Arnold MethodRoyan ArabzzNo ratings yet
- Chemistry: University of Cambridge International Examinations General Certificate of Education Ordinary LevelDocument16 pagesChemistry: University of Cambridge International Examinations General Certificate of Education Ordinary LevellearnerNo ratings yet
- Numerical Simulation of Liquids Draining From A TaDocument12 pagesNumerical Simulation of Liquids Draining From A TaputhenkulamNo ratings yet
- Chemical EngineeringDocument9 pagesChemical EngineeringanushafiNo ratings yet
- Optimal Control of Diafiltration Process For Albumin ProductionDocument6 pagesOptimal Control of Diafiltration Process For Albumin ProductionAura UrregoNo ratings yet
- University of Zimbabwe: 2016 Nov/Dec ExaminationsDocument3 pagesUniversity of Zimbabwe: 2016 Nov/Dec Examinationsmabuto tichaona cNo ratings yet
- Distillation ColumnDocument74 pagesDistillation Columnfatengz100% (3)
- Cleveland State University Lab 1Document28 pagesCleveland State University Lab 1Renzo Jose Canro CalderonNo ratings yet
- Acc07 PilotDocument8 pagesAcc07 PilotabbasNo ratings yet
- Universiti Teknologi Mara Final Examination: Confidential AS/OCT2010/CHM510Document5 pagesUniversiti Teknologi Mara Final Examination: Confidential AS/OCT2010/CHM510Awan ForeysitheNo ratings yet
- Modelling and Controlling of The Laboratory Distillation ColumnDocument53 pagesModelling and Controlling of The Laboratory Distillation ColumnBHOWMICK PATIDAR 15BCH0085No ratings yet
- CENG0005 - Proj - 2022 - With Cover SheetDocument6 pagesCENG0005 - Proj - 2022 - With Cover SheetGary Gary xuNo ratings yet
- Bioprocess Engg II TBE 601Document1 pageBioprocess Engg II TBE 601mayank kushwahaNo ratings yet
- Computation PDFDocument28 pagesComputation PDFvermavermapoojaNo ratings yet
- Effect of Suction Diameter Variations On Performance of Centrifugal PumpDocument5 pagesEffect of Suction Diameter Variations On Performance of Centrifugal Pumpdesign gipfelNo ratings yet
- M.Tech. (Computer Aided Chemical Engineering) (Effective From The Admitted Batch of 2019-20)Document35 pagesM.Tech. (Computer Aided Chemical Engineering) (Effective From The Admitted Batch of 2019-20)Gowri ShankarNo ratings yet
- CPDIC May 13Document9 pagesCPDIC May 13Sanjeev NehruNo ratings yet
- Ce-252 Fluid Mechanics-IiDocument13 pagesCe-252 Fluid Mechanics-IiTalha NadeemNo ratings yet
- Problem Set 10 - GeneralDocument7 pagesProblem Set 10 - GeneralAdekoya IfeoluwaNo ratings yet
- CHE 509: Process Dynamics: Empirical Modeling of Dynamical SystemsDocument61 pagesCHE 509: Process Dynamics: Empirical Modeling of Dynamical SystemsAdekoya IfeoluwaNo ratings yet
- Problem Set 3Document5 pagesProblem Set 3Adekoya IfeoluwaNo ratings yet
- WEEK 6 MODULE 6 - Neural Network ModelsDocument31 pagesWEEK 6 MODULE 6 - Neural Network ModelsAdekoya IfeoluwaNo ratings yet
- WEEK 5 MODULE 5 - Transient Behaviour of Complicated SystemsDocument30 pagesWEEK 5 MODULE 5 - Transient Behaviour of Complicated SystemsAdekoya IfeoluwaNo ratings yet
- WEEK 3 MODULE 3 - Chemical Process Systems ModelingDocument87 pagesWEEK 3 MODULE 3 - Chemical Process Systems ModelingAdekoya IfeoluwaNo ratings yet
- WEEK 5 MODULE 5 - Dynamic Behaviour of Second OrderDocument31 pagesWEEK 5 MODULE 5 - Dynamic Behaviour of Second OrderAdekoya IfeoluwaNo ratings yet
- WEEK 7 MODULE 7 - Analysis of Discrete Systems2Document49 pagesWEEK 7 MODULE 7 - Analysis of Discrete Systems2Adekoya IfeoluwaNo ratings yet
- WEEK 4 MODULE 4 - Dynamic Behaviour of Chemical Process SystemsDocument40 pagesWEEK 4 MODULE 4 - Dynamic Behaviour of Chemical Process SystemsAdekoya IfeoluwaNo ratings yet
- ERUDITE CHE 400 REPORT Final Version 1Document161 pagesERUDITE CHE 400 REPORT Final Version 1Adekoya IfeoluwaNo ratings yet
- WEEK 2 - Chemical Process Systems ModelingDocument76 pagesWEEK 2 - Chemical Process Systems ModelingAdekoya IfeoluwaNo ratings yet
- Gear Pump EruditeDocument36 pagesGear Pump EruditeAdekoya IfeoluwaNo ratings yet
- DistillationDocument31 pagesDistillationAdekoya IfeoluwaNo ratings yet
- DryingDocument30 pagesDryingAdekoya IfeoluwaNo ratings yet
- EffluxDocument29 pagesEffluxAdekoya IfeoluwaNo ratings yet
- Kalb 15329 PDFDocument65 pagesKalb 15329 PDFRecordTrac - City of OaklandNo ratings yet
- M.tech Structural Engineering Syllabus 2nd SemesterDocument5 pagesM.tech Structural Engineering Syllabus 2nd SemesterPriyankaNo ratings yet
- Electronics Projects Traffic Light Lamp Blow Monitoring - SingaporeDocument5 pagesElectronics Projects Traffic Light Lamp Blow Monitoring - SingaporeAllan Abobon BulataoNo ratings yet
- Ket Exam 3 ListeningDocument6 pagesKet Exam 3 ListeningFranciscaBalasSuarezNo ratings yet
- Tictactoe AI DocumentationDocument16 pagesTictactoe AI DocumentationKou CatarajaNo ratings yet
- Module 1 Chapter 3 Week 3 Fundamentals of Surveying LectureDocument12 pagesModule 1 Chapter 3 Week 3 Fundamentals of Surveying LecturePrincess Erika CanlasNo ratings yet
- First Division (G.R. No. 229440. July 14, 2021)Document27 pagesFirst Division (G.R. No. 229440. July 14, 2021)Christopher ArellanoNo ratings yet
- BADB1023 Lesson 2Document14 pagesBADB1023 Lesson 2Nurul AsyuraNo ratings yet
- Antim Prahar Marketing Managment 2023Document25 pagesAntim Prahar Marketing Managment 2023Vineeta GautamNo ratings yet
- RMC No. 124-2020Document6 pagesRMC No. 124-2020Raine Buenaventura-Eleazar100% (2)
- Case 5 - Proton Full AssignmentDocument42 pagesCase 5 - Proton Full AssignmentShaa Didi100% (1)
- EDPS - (Guidelines) On Processing PI in Whistleblowing Procedure A 17-12-19Document16 pagesEDPS - (Guidelines) On Processing PI in Whistleblowing Procedure A 17-12-19Mario Gomez100% (1)
- L5 - Citations and AttributionsDocument15 pagesL5 - Citations and AttributionsHashem EL-MaRimey0% (1)
- Principles of Finance Event Participant Instructions: Career Cluster Instructional AreaDocument6 pagesPrinciples of Finance Event Participant Instructions: Career Cluster Instructional AreaMaddy NorrisNo ratings yet
- Streets and Roads (Draft) : Sustrans Design Manual Chapter 4Document95 pagesStreets and Roads (Draft) : Sustrans Design Manual Chapter 4Aulannisa IsthafiNo ratings yet
- Studentzone 02 2017Document3 pagesStudentzone 02 2017YahiaEl-obidyNo ratings yet
- Bevco Everlast Chair Installation GuideDocument1 pageBevco Everlast Chair Installation GuideLuis OntiverosNo ratings yet
- Bd18 Ficha TecnicaDocument2 pagesBd18 Ficha TecnicaGorch MarrokoNo ratings yet
- Biko 2Document6 pagesBiko 2johnwhite126No ratings yet
- Bop Systems Function / Field Drawdown TestDocument1 pageBop Systems Function / Field Drawdown Testislam atifNo ratings yet
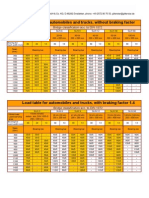
- 9 Gitterstar LoadTable Autom TrucksDocument1 page9 Gitterstar LoadTable Autom TrucksSnaz_nedainNo ratings yet
- PFP Tutorial 8Document2 pagesPFP Tutorial 8stellaNo ratings yet