You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Chronic Kidney DiseaseDocument15 pagesChronic Kidney Diseaseapi-270623039No ratings yet
- Human EpigenomicsDocument234 pagesHuman EpigenomicsHeron HilárioNo ratings yet
- Chapter 8 Data Collection InstrumentsDocument19 pagesChapter 8 Data Collection InstrumentssharmabastolaNo ratings yet
- Carriage RequirementsDocument63 pagesCarriage RequirementsFred GrosfilerNo ratings yet
- 05 x05 Standard Costing & Variance AnalysisDocument27 pages05 x05 Standard Costing & Variance AnalysisMary April MasbangNo ratings yet
- of Thesis ProjectDocument2 pagesof Thesis ProjectmoonNo ratings yet
- Framework For Integrating Safety Into Construction Methods Education Through Interactive Virtual RealityDocument10 pagesFramework For Integrating Safety Into Construction Methods Education Through Interactive Virtual RealitydianagueNo ratings yet
- Virtual Reality Training System For Maintenance and OperationDocument14 pagesVirtual Reality Training System For Maintenance and OperationdianagueNo ratings yet
- Implementing Virtual Reality Technology For Safety Training in The Precast Prestressed Concrete IndustryDocument11 pagesImplementing Virtual Reality Technology For Safety Training in The Precast Prestressed Concrete IndustrydianagueNo ratings yet
- Estudio 1Document14 pagesEstudio 1dianagueNo ratings yet
- Immersive Virtual Reality As An Empirical Research Tool ExploringDocument23 pagesImmersive Virtual Reality As An Empirical Research Tool ExploringdianagueNo ratings yet
- Serious Game: Confined Space Rescue Based On Virtual Reality TechnologyDocument8 pagesSerious Game: Confined Space Rescue Based On Virtual Reality TechnologydianagueNo ratings yet
- An Advanced Solutions For Operators' Training Working in ConfinedDocument5 pagesAn Advanced Solutions For Operators' Training Working in ConfineddianagueNo ratings yet
- A Virtual Reality Platform For Safety Training in Coal Mines WithDocument7 pagesA Virtual Reality Platform For Safety Training in Coal Mines WithdianagueNo ratings yet
- My Personal Code of Ethics1Document1 pageMy Personal Code of Ethics1Princess Angel LucanasNo ratings yet
- Lesson PlanDocument2 pagesLesson Plannicole rigonNo ratings yet
- 74HC00D 74HC00D 74HC00D 74HC00D: CMOS Digital Integrated Circuits Silicon MonolithicDocument8 pages74HC00D 74HC00D 74HC00D 74HC00D: CMOS Digital Integrated Circuits Silicon MonolithicAssistec TecNo ratings yet
- Business Plan 3.3Document2 pagesBusiness Plan 3.3Rojin TingabngabNo ratings yet
- Science7 - q1 - Mod3 - Distinguishing Mixtures From Substances - v5Document25 pagesScience7 - q1 - Mod3 - Distinguishing Mixtures From Substances - v5Bella BalendresNo ratings yet
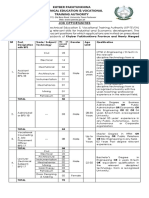
- KP Tevta Advertisement 16-09-2019Document4 pagesKP Tevta Advertisement 16-09-2019Ishaq AminNo ratings yet
- Dtu Placement BrouchureDocument25 pagesDtu Placement BrouchureAbhishek KumarNo ratings yet
- Assessment of Students' Oral Communication in English ClassDocument10 pagesAssessment of Students' Oral Communication in English ClassKeebeek S ArbasNo ratings yet
- MASONRYDocument8 pagesMASONRYJowelyn MaderalNo ratings yet
- LetrasDocument9 pagesLetrasMaricielo Angeline Vilca QuispeNo ratings yet
- Developing Paragraphs: Test Section - Writing Task 2Document11 pagesDeveloping Paragraphs: Test Section - Writing Task 2Cengizhan AkdağNo ratings yet
- .Urp 203 Note 2022 - 1642405559000Document6 pages.Urp 203 Note 2022 - 1642405559000Farouk SalehNo ratings yet
- Howard R700X - SPL - INTDocument44 pagesHoward R700X - SPL - INTJozsefNo ratings yet
- 2SB817 - 2SD1047 PDFDocument4 pages2SB817 - 2SD1047 PDFisaiasvaNo ratings yet
- Quantitative Methods For Economics and Business Lecture N. 5Document20 pagesQuantitative Methods For Economics and Business Lecture N. 5ghassen msakenNo ratings yet
- De Thi Hoc Ki 1 Mon Tieng Anh Lop 5 Co File NgheDocument10 pagesDe Thi Hoc Ki 1 Mon Tieng Anh Lop 5 Co File Nghetuyen truongNo ratings yet
- FAMOUS PP Past TenseDocument21 pagesFAMOUS PP Past Tenseme me kyawNo ratings yet
- Aptitude Number System PDFDocument5 pagesAptitude Number System PDFharieswaranNo ratings yet
- Sba 2Document29 pagesSba 2api-377332228No ratings yet
- Obesity - The Health Time Bomb: ©LTPHN 2008Document36 pagesObesity - The Health Time Bomb: ©LTPHN 2008EVA PUTRANTO100% (2)
- How Drugs Work - Basic Pharmacology For Healthcare ProfessionalsDocument19 pagesHow Drugs Work - Basic Pharmacology For Healthcare ProfessionalsSebastián Pérez GuerraNo ratings yet
- Read While Being Blind.. Braille's Alphabet: Be Aware and Active !Document3 pagesRead While Being Blind.. Braille's Alphabet: Be Aware and Active !bitermanNo ratings yet
- Report Card Grade 1 2Document3 pagesReport Card Grade 1 2Mely DelacruzNo ratings yet
- 7400 IC SeriesDocument16 pages7400 IC SeriesRaj ZalariaNo ratings yet