You might also like
- 30 Current SailingDocument42 pages30 Current SailingDaniel England100% (1)
- 05 Tropical Revolving StormsDocument21 pages05 Tropical Revolving StormsBhupinder Singh Jhajj100% (1)
- Azimuth by Solar ObservationDocument6 pagesAzimuth by Solar Observationmaureen garridoNo ratings yet
- Certificate of Class: Lloyd's Register EMEADocument3 pagesCertificate of Class: Lloyd's Register EMEANevzat AlkoçNo ratings yet
- 18 Gryo Compass ErrorDocument21 pages18 Gryo Compass ErrorDaniel England100% (3)
- LNG - BORTCL - Financial ModelDocument17 pagesLNG - BORTCL - Financial ModelTafweezNo ratings yet
- Labo3 Chartwork 2022Document59 pagesLabo3 Chartwork 2022louisflodfNo ratings yet
- 02.04b Ch4 PPT SlidesDocument114 pages02.04b Ch4 PPT Slidespothiraj100% (1)
- Errors Gyro CompassDocument11 pagesErrors Gyro Compassatinder13No ratings yet
- Compass ErrorDocument12 pagesCompass ErrorInsan AhammadNo ratings yet
- Mercator SailingDocument7 pagesMercator SailingFrederick MoncadaNo ratings yet
- CH 06 Great Circle SailingDocument12 pagesCH 06 Great Circle SailingNarendra Kumar100% (1)
- Position Fixing MethodsDocument28 pagesPosition Fixing MethodsFlexi100% (1)
- Astronomical Position LinesDocument24 pagesAstronomical Position LinesRamachandranNo ratings yet
- E190 - E195 - Airplane Flight Manual (AFM) - REV.20Document516 pagesE190 - E195 - Airplane Flight Manual (AFM) - REV.20fejet100% (1)
- CLOP Explanation and MethodsDocument27 pagesCLOP Explanation and MethodsKarthick100% (1)
- Prelim Examination Navigation 5Document4 pagesPrelim Examination Navigation 5MICAH JEZER BUGARIN100% (1)
- Chart Projections PDFDocument2 pagesChart Projections PDFNikhil ReddyNo ratings yet
- B1b StabilityDocument17 pagesB1b StabilityDarwin Neil MoranoNo ratings yet
- Stability Theory With Ques and AnsDocument25 pagesStability Theory With Ques and AnsAnkit BatraNo ratings yet
- 33 Relative and TrueDocument32 pages33 Relative and TrueDaniel EnglandNo ratings yet
- DefinitionsDocument3 pagesDefinitionsAhmed AboelmagdNo ratings yet
- 1 (1) - Marine InstrumentsDocument51 pages1 (1) - Marine InstrumentsMin Minkyaw100% (3)
- 2nd Mates SyllabusDocument11 pages2nd Mates SyllabusSarang TurekarNo ratings yet
- The Marine ChronometerDocument3 pagesThe Marine ChronometerGiorgi Kandelaki0% (1)
- CM Sailing - Lesson 1 For MoodleDocument39 pagesCM Sailing - Lesson 1 For Moodlesugumar100% (1)
- Oow Reading ListDocument1 pageOow Reading ListNikNik001No ratings yet
- Design and Construction of Concrete Filled Steel Tubular Arch Bridge PDFDocument7 pagesDesign and Construction of Concrete Filled Steel Tubular Arch Bridge PDFnishantsky1990No ratings yet
- Plane SailingDocument7 pagesPlane SailingLouise Megan LequinNo ratings yet
- Sextant Errors and CorrectionsDocument1 pageSextant Errors and CorrectionsrigelNo ratings yet
- Circumpolar Bodies and Miscellaneous ProblemDocument6 pagesCircumpolar Bodies and Miscellaneous Problemsusheel dangurNo ratings yet
- Sights of Celestial ObjectDocument10 pagesSights of Celestial ObjectReetam Bose100% (1)
- Ch16-Work Sampling-2012 PDFDocument27 pagesCh16-Work Sampling-2012 PDFGökhan Kof0% (1)
- CNB PPT Session 7Document80 pagesCNB PPT Session 7Andrei CNo ratings yet
- Us Cogsa: History of Limitation of Liability For Cargo DamageDocument15 pagesUs Cogsa: History of Limitation of Liability For Cargo DamageAnkit MauryaNo ratings yet
- Turning Circle NotesDocument6 pagesTurning Circle Notesss_tayadeNo ratings yet
- 1944 - Goland and Reissner - The Stresses in Cemented JointsDocument11 pages1944 - Goland and Reissner - The Stresses in Cemented JointsAbril Yu-ShanNo ratings yet
- Azimuths and AmplitudesDocument5 pagesAzimuths and AmplitudesTheoNo ratings yet
- Gyro - Error - Object-MoonDocument1 pageGyro - Error - Object-MoonJoshua KinneyNo ratings yet
- GRAINCALCNCBDocument8 pagesGRAINCALCNCBwaleedyehia100% (1)
- Treveia NuvaliDocument40 pagesTreveia NuvaliNoemi Lardizabal-Dado100% (1)
- Chartwork Second Mate - Capt.a.K.prasadDocument9 pagesChartwork Second Mate - Capt.a.K.prasadPrasanna50% (2)
- Navigation 01Document8 pagesNavigation 01Khian LiNo ratings yet
- Module 2 Topic ListDocument40 pagesModule 2 Topic ListXtianeNo ratings yet
- C - 3.1 Timber CargoDocument9 pagesC - 3.1 Timber CargoНикита НовикNo ratings yet
- (H) Compass Deviation by AzimuthDocument7 pages(H) Compass Deviation by AzimuthBernard MamoraNo ratings yet
- Azimuth and AmplitudeDocument9 pagesAzimuth and AmplitudeBer-June Lastimado100% (1)
- Man OverboardDocument2 pagesMan OverboardIlija BaldicNo ratings yet
- Assign No 3 GZ CurveDocument3 pagesAssign No 3 GZ CurveShikhar SwaroopNo ratings yet
- Gyro ErrorsDocument8 pagesGyro ErrorsmercyvienhoNo ratings yet
- OIC-NW Reviewer Blog - Solving Distance by Parallel SailingDocument2 pagesOIC-NW Reviewer Blog - Solving Distance by Parallel SailingJofel Calaycay100% (1)
- IMO Grain Code Stability RequirementsDocument2 pagesIMO Grain Code Stability RequirementsRakesh EdekkadNo ratings yet
- Damage Control Plan N BookletDocument2 pagesDamage Control Plan N BookletAbu Nawshad100% (1)
- CH 02 Rising and Dipping DistanceDocument4 pagesCH 02 Rising and Dipping DistanceNarendra Kumar0% (1)
- Lights and Shapes DefinitionsDocument18 pagesLights and Shapes Definitionsarif kamaruddinNo ratings yet
- Maritime Law: Week 1 PrelimDocument77 pagesMaritime Law: Week 1 PrelimJusty Cadungog100% (1)
- Initial Transverse MetacentreDocument9 pagesInitial Transverse MetacentreBharatiyulam100% (1)
- Chart Plotting OOW, NavigationDocument90 pagesChart Plotting OOW, NavigationAmin Al Qawasmeh100% (1)
- Orals MetDocument3 pagesOrals MetcaptyashpalNo ratings yet
- Initial Transverse Metacenter CugalDocument19 pagesInitial Transverse Metacenter CugalPete KatipunanNo ratings yet
- Compass Checks: ExampleDocument4 pagesCompass Checks: ExamplejfgohlkeNo ratings yet
- Valdez Finals Assignment 2Document5 pagesValdez Finals Assignment 2DM ValdezNo ratings yet
- Pub249Vol3 PDFDocument359 pagesPub249Vol3 PDFJerzy IdzikowskiNo ratings yet
- BGBWDocument9 pagesBGBWShubham SinghNo ratings yet
- DIAPDocument18 pagesDIAPShubham SinghNo ratings yet
- EBLGDocument20 pagesEBLGShubham SinghNo ratings yet
- PDF Installation and Use V8.0Document7 pagesPDF Installation and Use V8.0Alexandre SerafiniNo ratings yet
- Coldanddark A300Document2 pagesColdanddark A300Shubham SinghNo ratings yet
- SEACARE OSD 2 EnglishDocument8 pagesSEACARE OSD 2 EnglishShubham SinghNo ratings yet
- PPT: ASEAN & SAARC Regional Rice Trade: Status & Opportunities For Ensuring Food SecurityDocument36 pagesPPT: ASEAN & SAARC Regional Rice Trade: Status & Opportunities For Ensuring Food SecurityASEAN Rice Trade ForumNo ratings yet
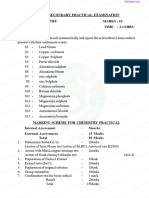
- 11th Chemistry Practical Question Paper English MediumDocument1 page11th Chemistry Practical Question Paper English Mediumayanas2626No ratings yet
- LV38-Automatic Transmission SystemsDocument46 pagesLV38-Automatic Transmission SystemsĐức HòangNo ratings yet
- ECSS Q ST 40 02C (15november2008)Document36 pagesECSS Q ST 40 02C (15november2008)jsadachiNo ratings yet
- Notes Quranic PassagesDocument17 pagesNotes Quranic PassagesRazan Ali60% (5)
- Sources of Microorganisms in FoodsDocument23 pagesSources of Microorganisms in FoodsLebohang Mofokeng DavidNo ratings yet
- Olympian Benchmark - 400mDocument15 pagesOlympian Benchmark - 400merwandumontNo ratings yet
- A Midsummer NightDocument48 pagesA Midsummer Nightkamyp0pNo ratings yet
- Data Fundamental 2011 - 2019Document660 pagesData Fundamental 2011 - 2019Arya PanggalihNo ratings yet
- s12517 020 5241 ZDocument17 pagess12517 020 5241 ZMemar AliNo ratings yet
- Sugar Remedy BrochureDocument8 pagesSugar Remedy Brochurecksharma68No ratings yet
- MCQ Rognidan 170820Document58 pagesMCQ Rognidan 170820Setu UpadhyayNo ratings yet
- Directory - Ontario Federation of AgricultureDocument69 pagesDirectory - Ontario Federation of Agriculturearwid vasilevNo ratings yet
- Training Report On DoordarshanDocument71 pagesTraining Report On Doordarshan2007_varunNo ratings yet
- GH 1832 Auto GH 1835 Manual: Key Features Key SpecificationsDocument4 pagesGH 1832 Auto GH 1835 Manual: Key Features Key Specificationsalejandro calixtoNo ratings yet
- 25 - Gas CalcsDocument36 pages25 - Gas CalcsChinmiholicNo ratings yet
- Dental WaxfinalDocument80 pagesDental WaxfinalSimoun FeirNo ratings yet
- Grade 4 - Text TypesDocument17 pagesGrade 4 - Text TypesladyNo ratings yet
- Wiring DiagramDocument3 pagesWiring DiagramJosé MacedoNo ratings yet
- Wadada Hydel Techgeneral 2021Document36 pagesWadada Hydel Techgeneral 2021Hamza IzharNo ratings yet
- Acids and BasesDocument11 pagesAcids and BasesTanya NdlovuNo ratings yet
- MSDS KrylonDocument5 pagesMSDS KrylonEMPATI LUWU TIMURNo ratings yet
- 623 Epm Mobile TransceiverDocument4 pages623 Epm Mobile TransceiverPhuc HoangNo ratings yet