You might also like
- Asymmetric BocWen With GADocument6 pagesAsymmetric BocWen With GAHafizNo ratings yet
- Alber G., Zeilinger A., Et Al. Quantum Information (STMP 173, Springer, 2001) (195s) - PQMDocument195 pagesAlber G., Zeilinger A., Et Al. Quantum Information (STMP 173, Springer, 2001) (195s) - PQMdarkchaos_2012No ratings yet
- Harnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingFrom EverandHarnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingNo ratings yet
- Stability Analisys On Nonlinear Mechanical System: Romes@Document18 pagesStability Analisys On Nonlinear Mechanical System: Romes@Romes BorgesNo ratings yet
- Nolinealrespuestamasaresorte PDFDocument11 pagesNolinealrespuestamasaresorte PDFBlanca RiosNo ratings yet
- Estimating gantry crane frequency using MEMS accelerometerDocument7 pagesEstimating gantry crane frequency using MEMS accelerometerMuhammad Auwal ShehuNo ratings yet
- (Springer Tracts in Modern Physics 173) Gernot Alber, Thomas Beth, Michał Horodecki, Paweł Horodecki, Ryszard Horodecki, Martin Rötteler, Harald Weinfurter, Reinhard Werner, Anton Zeilinger (auth.) - .pdfDocument195 pages(Springer Tracts in Modern Physics 173) Gernot Alber, Thomas Beth, Michał Horodecki, Paweł Horodecki, Ryszard Horodecki, Martin Rötteler, Harald Weinfurter, Reinhard Werner, Anton Zeilinger (auth.) - .pdfDevin ChayNo ratings yet
- Quantum Information, An Introduction To Basic Theoretical Concepts & Experiments PDFDocument195 pagesQuantum Information, An Introduction To Basic Theoretical Concepts & Experiments PDFLava MonsoonNo ratings yet
- Time Series Analysis Using e ViewsDocument131 pagesTime Series Analysis Using e ViewsNabeel Mahdi Aljanabi100% (1)
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahNo ratings yet
- 2 Mathematical Modeling ALL@Document75 pages2 Mathematical Modeling ALL@WolfNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Document183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulNo ratings yet
- Reliability HotWireDocument17 pagesReliability HotWireLuis MatíasNo ratings yet
- Control Systems U3 (TEL306)Document84 pagesControl Systems U3 (TEL306)Ruvenderan SuburamaniamNo ratings yet
- Nonlinear Control Systems 1. - Introduction To Nonlinear SystemsDocument54 pagesNonlinear Control Systems 1. - Introduction To Nonlinear SystemsGech ManNo ratings yet
- Chapter 1 Backgrounds, Motivations and Objectives for Fault DetectionDocument10 pagesChapter 1 Backgrounds, Motivations and Objectives for Fault DetectionvioletachkaNo ratings yet
- Bathe Cap8 Print Fullpage OddsDocument37 pagesBathe Cap8 Print Fullpage OddsAlexandre ArnoldNo ratings yet
- Effect of Exhaust Grille Position On Air Quality and Flow Patterns in Clean RoomsDocument10 pagesEffect of Exhaust Grille Position On Air Quality and Flow Patterns in Clean Roomshesham metwallyNo ratings yet
- Dynamics of A Parametrically Excited DouDocument18 pagesDynamics of A Parametrically Excited DouGerson CruzNo ratings yet
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- 10 1 1 621 550 PDFDocument43 pages10 1 1 621 550 PDFNaresh VlsidNo ratings yet
- Cunhaetal 1998copernicusDocument6 pagesCunhaetal 1998copernicusNelson SouzaNo ratings yet
- Transfer Functions: Student Report Mahmoud Mohamed KhodeirDocument9 pagesTransfer Functions: Student Report Mahmoud Mohamed Khodeirالبياتي محمدNo ratings yet
- Examination SIPE 2008Document4 pagesExamination SIPE 2008mrinal570No ratings yet
- 2 - Nonlinear VI - 2014 - Parameter Identification and Monitoring of MechanicalDocument19 pages2 - Nonlinear VI - 2014 - Parameter Identification and Monitoring of Mechanicalvikas sharmaNo ratings yet
- Table Des Matières: Kouekam Sedric JoelDocument10 pagesTable Des Matières: Kouekam Sedric JoelGeraud Russel Goune ChenguiNo ratings yet
- Mechanism and Machine Theory: Ying Wu, Kaiping Yu, Jian Jiao, Rui ZhaoDocument29 pagesMechanism and Machine Theory: Ying Wu, Kaiping Yu, Jian Jiao, Rui ZhaoYazdan RastegarNo ratings yet
- On Offset Boosting in Chaotic SystemDocument8 pagesOn Offset Boosting in Chaotic SystemSerkan SahinNo ratings yet
- On The Stabilization and Stability Robustness Against Small Delays of Some Damped Wave EquationsDocument5 pagesOn The Stabilization and Stability Robustness Against Small Delays of Some Damped Wave EquationsInst Robert Díaz RiemannNo ratings yet
- Estimation of The True Lyapunov Spectrum For Instability Prediction of A Simple Numerical Model of A Brake SystemDocument11 pagesEstimation of The True Lyapunov Spectrum For Instability Prediction of A Simple Numerical Model of A Brake SystemMuhammad M ElhafidNo ratings yet
- My Thirds em ReportDocument21 pagesMy Thirds em ReportMassDuttNo ratings yet
- Interval Approach: To Determine Robust Control Strategies of A Dynamic SystemDocument56 pagesInterval Approach: To Determine Robust Control Strategies of A Dynamic SystemAbhinandan GhoseNo ratings yet
- Nonlinear System Analysis and ControlDocument88 pagesNonlinear System Analysis and ControlElvis TsangNo ratings yet
- Operational Modal Analysis of Rotating MachineryDocument8 pagesOperational Modal Analysis of Rotating MachineryGuille Ciprian NoaNo ratings yet
- Lab # 5 PDFDocument5 pagesLab # 5 PDFAli HamzaNo ratings yet
- OscillatorsDocument15 pagesOscillatorsdamilolaa_xNo ratings yet
- Module PE - PAS.U22.5: Composite System ReliabilityDocument58 pagesModule PE - PAS.U22.5: Composite System ReliabilityTrevor ClineNo ratings yet
- Arch03v37n1 5Document63 pagesArch03v37n1 5Ahmed FenneurNo ratings yet
- Revision CHAOSDocument12 pagesRevision CHAOSJesus Manuel Muñoz PachecoNo ratings yet
- Synchronization of Chaotic Systems With Uncertain Parameters by Adaptive ControlDocument4 pagesSynchronization of Chaotic Systems With Uncertain Parameters by Adaptive Controllaz_chikhi1574No ratings yet
- 6th Sem PapersDocument12 pages6th Sem Papers21BEE044 MANOJ KHEMANINo ratings yet
- And Linear Relaxation Phenomena: Stable Law DensitiesDocument13 pagesAnd Linear Relaxation Phenomena: Stable Law Densitiesgsach11No ratings yet
- Output Linear Feedback For A Class of Nonlinear Systems Based On The Invariant Ellipsoid MethodDocument6 pagesOutput Linear Feedback For A Class of Nonlinear Systems Based On The Invariant Ellipsoid MethodinfodotzNo ratings yet
- Revised Advanced Digital Systems Design 06Document19 pagesRevised Advanced Digital Systems Design 06Melsougly BryceNo ratings yet
- Lab-6 (First Order System)Document9 pagesLab-6 (First Order System)MaMa BalochNo ratings yet
- Rate Models For Conductance-Based Cortical Neuronal NetworksDocument33 pagesRate Models For Conductance-Based Cortical Neuronal NetworksFrontiersNo ratings yet
- Analysis of Oscillations With Eigenanalysis andDocument8 pagesAnalysis of Oscillations With Eigenanalysis andMadhusudhan SrinivasanNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- AE6505 Control Engineering Course FileDocument7 pagesAE6505 Control Engineering Course FilegallantprakashNo ratings yet
- ID 4478 Structural and Parametric Identification of Linear Systems With Delay or A Slow Initial OnsetDocument6 pagesID 4478 Structural and Parametric Identification of Linear Systems With Delay or A Slow Initial OnsetKais BouzraraNo ratings yet
- Nonlinear Control Systems ExercisesDocument99 pagesNonlinear Control Systems ExercisesRiccardo M.G. Ferrari100% (2)
- 2013 GENG4402 Supplementary ExamDocument6 pages2013 GENG4402 Supplementary ExamjohnNo ratings yet
- Isma2014 0655Document14 pagesIsma2014 0655Alvaro CotaquispeNo ratings yet
- Dynamics of A Mass On Moving Belt With Dry Friction: Manish Agarwal and Soumitro BanerjeeDocument4 pagesDynamics of A Mass On Moving Belt With Dry Friction: Manish Agarwal and Soumitro Banerjeefelix_cialini9845No ratings yet
- Any Title: A. Partner, B. Partner, and C. Partner August 20, 2021Document4 pagesAny Title: A. Partner, B. Partner, and C. Partner August 20, 2021Pratiksha SinghNo ratings yet
- Molecular Dynamics in Biosystems: The Kinetics of Tracers in Intact OrganismsFrom EverandMolecular Dynamics in Biosystems: The Kinetics of Tracers in Intact OrganismsNo ratings yet
- Initial Condit AnalysisDocument6 pagesInitial Condit AnalysisMarcrot MendezNo ratings yet
- Experimental Quantum Computing To Solve Systems of Linear EquationsDocument5 pagesExperimental Quantum Computing To Solve Systems of Linear EquationsMazikeen MorningstarNo ratings yet
- Modern Player Telecaster® Plus (0241102Xxx) : Parts LayoutDocument4 pagesModern Player Telecaster® Plus (0241102Xxx) : Parts Layoutyongjiang luNo ratings yet
- Faraz CV EnglishDocument2 pagesFaraz CV EnglishArbabNo ratings yet
- Caethial's D&D Corner - Gaming Table BuildDocument25 pagesCaethial's D&D Corner - Gaming Table BuildafxxxNo ratings yet
- ZXHN H108N (V2.5) Home Gateway Maintenance Management ManualDocument117 pagesZXHN H108N (V2.5) Home Gateway Maintenance Management Manualdeatmeteor50% (2)
- Assembly Language 8086 Candy CrushDocument41 pagesAssembly Language 8086 Candy Crushaleena0% (1)
- 1810 (W 100 CFi - W 120 CFi - W 130 CFi) PDFDocument1 page1810 (W 100 CFi - W 120 CFi - W 130 CFi) PDFadrianNo ratings yet
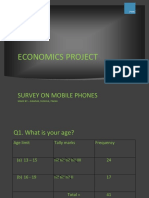
- Economics Project: Survey On Mobile PhonesDocument16 pagesEconomics Project: Survey On Mobile PhonesmanikNo ratings yet
- History and Working Principle of CNC MachinesDocument308 pagesHistory and Working Principle of CNC MachinesYash IngleNo ratings yet
- 09 - Configuring Cisco ASADocument8 pages09 - Configuring Cisco ASAMorad Alabsy100% (1)
- 2 Classical Detection and Estimation TheoryDocument62 pages2 Classical Detection and Estimation Theorythesunbk25No ratings yet
- Skills-Based Assessment (Version A) : TopologyDocument5 pagesSkills-Based Assessment (Version A) : TopologyYagui100% (1)
- HTML5 e CSS3 - Guia Prático e Visual (7 Edição) (009-010)Document2 pagesHTML5 e CSS3 - Guia Prático e Visual (7 Edição) (009-010)bruno2013familiaNo ratings yet
- F2022C00010Document152 pagesF2022C00010CNo ratings yet
- Cloud Strategy Tds ExtractDocument14 pagesCloud Strategy Tds ExtractkkNo ratings yet
- Brief Operating Instructions Vacuum Switch VS-V-D-PNP: 1 DisplayDocument2 pagesBrief Operating Instructions Vacuum Switch VS-V-D-PNP: 1 DisplayJavier MiramontesNo ratings yet
- 2 Ch05EN Maintenance ManualDocument26 pages2 Ch05EN Maintenance ManualMounir AngadNo ratings yet
- 4 Special Fire Hazards and PreventionDocument22 pages4 Special Fire Hazards and Preventiondroffilcz27100% (1)
- The Digital Butterfly EffectDocument7 pagesThe Digital Butterfly EffectAnonymous PXX1LANo ratings yet
- DH-HAC-B2A21: 2MP HDCVI IR Bullet CameraDocument3 pagesDH-HAC-B2A21: 2MP HDCVI IR Bullet CameraDenis RodriguezNo ratings yet
- Screenshot 2020-04-23 at 11.17.03 AM PDFDocument39 pagesScreenshot 2020-04-23 at 11.17.03 AM PDFHannah Badrul HishamNo ratings yet
- Steval lll012v1Document5 pagesSteval lll012v1Angelė LNo ratings yet
- 050 Vacuum Pump Systems 2021Document190 pages050 Vacuum Pump Systems 2021Balamurugan ArumugamNo ratings yet
- Release Mode Bundle ErrorDocument11 pagesRelease Mode Bundle ErrorRaman deepNo ratings yet
- 05 38 Counts Exercise & TextDocument5 pages05 38 Counts Exercise & TextANUP MUNDENo ratings yet
- OperationManual ASE 2Document74 pagesOperationManual ASE 2Masoom Sawaira DhmNo ratings yet
- Pentode JJ Ef806sDocument2 pagesPentode JJ Ef806sCristianNo ratings yet
- Computer Engineering Syllabus Sem IV - Mumbai UniversityDocument28 pagesComputer Engineering Syllabus Sem IV - Mumbai UniversityDaivik ChaulkarNo ratings yet
- Chapter 1Document73 pagesChapter 1Mekonen AberaNo ratings yet
- HSEQ-HQ-06-09-00 Security StandardDocument9 pagesHSEQ-HQ-06-09-00 Security StandardAHMED AMIRANo ratings yet
- Circular XIDocument2 pagesCircular XIRavi Teja RTNo ratings yet