You might also like
- Lab-7 (Second Order System)Document14 pagesLab-7 (Second Order System)MaMa BalochNo ratings yet
- Electronic Systems: Study Topics in Physics Book 8From EverandElectronic Systems: Study Topics in Physics Book 8Rating: 5 out of 5 stars5/5 (1)
- Lab-9 (Frequency Response Analysis of SOS)Document7 pagesLab-9 (Frequency Response Analysis of SOS)MaMa BalochNo ratings yet
- Lab-8 (Frequency Response Analysis)Document6 pagesLab-8 (Frequency Response Analysis)MaMa BalochNo ratings yet
- Lab Handout #7: Time-Domain Analysis of A Second Order SystemDocument4 pagesLab Handout #7: Time-Domain Analysis of A Second Order SystemArslan AhmedNo ratings yet
- SLS Laboratory APU2F1908 PDFDocument5 pagesSLS Laboratory APU2F1908 PDFLimpei chinNo ratings yet
- ETR6C3Document3 pagesETR6C3Shikha PatelNo ratings yet
- Experiment 3Document7 pagesExperiment 3Usama NadeemNo ratings yet
- Activity 03Document11 pagesActivity 03Joshua AbadNo ratings yet
- II EceDocument16 pagesII EceAruna ChandranNo ratings yet
- Controls Infosheet and Sample Problems 0Document11 pagesControls Infosheet and Sample Problems 0Md Nur-A-Adam DonyNo ratings yet
- CIS Control Technology-Theory-Spring-2021Document6 pagesCIS Control Technology-Theory-Spring-2021mishal shakeelNo ratings yet
- Experiment 2Document16 pagesExperiment 2roxetteNo ratings yet
- JointActivity 2 Nov2022Document3 pagesJointActivity 2 Nov2022Smati DjamelNo ratings yet
- Linear Control System Lab: Utilizing Simulink To Implement The Mathematical Model of Translational Mechanical SystemDocument8 pagesLinear Control System Lab: Utilizing Simulink To Implement The Mathematical Model of Translational Mechanical SystemMuhammad Saad AbdullahNo ratings yet
- Feedback and Control Systems: Activity No. 2 - Time Response of Dynamic SystemsDocument15 pagesFeedback and Control Systems: Activity No. 2 - Time Response of Dynamic SystemsYvesExequielPascuaNo ratings yet
- U U (UIU) : Expt. No. 4Document7 pagesU U (UIU) : Expt. No. 4Maksud SarkerNo ratings yet
- Gujarat Technological University: Aeronautical Engineering Subject CodeDocument4 pagesGujarat Technological University: Aeronautical Engineering Subject CodeHarnil VaghasiyaNo ratings yet
- TMA1Document6 pagesTMA1Idiots IdiotssNo ratings yet
- SAS Lab Manual For 17-18Document76 pagesSAS Lab Manual For 17-18Amir QureshiNo ratings yet
- Screenshot 2022-12-13 at 10.13.33 PMDocument71 pagesScreenshot 2022-12-13 at 10.13.33 PMDeer DeerNo ratings yet
- Experiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionDocument12 pagesExperiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionNimra NoorNo ratings yet
- Problem Based Learning For Control System 2019 2020Document7 pagesProblem Based Learning For Control System 2019 2020maketoNo ratings yet
- (Course) MIT Course Process Control Problems Set (2006)Document12 pages(Course) MIT Course Process Control Problems Set (2006)scottt_84No ratings yet
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDocument15 pagesELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNo ratings yet
- Activity 02Document17 pagesActivity 02Rolando CruzNo ratings yet
- Lab-9 (Temparature Control System)Document4 pagesLab-9 (Temparature Control System)irsajanjanNo ratings yet
- University of Oslo: Faculty of Mathematics and Natural SciencesDocument4 pagesUniversity of Oslo: Faculty of Mathematics and Natural Sciencesasalifew belachewNo ratings yet
- CEP - LCS Spring 2022Document4 pagesCEP - LCS Spring 2022Muhammad ZeeshanNo ratings yet
- Revised Advanced Digital Systems Design 04 For PresentationDocument13 pagesRevised Advanced Digital Systems Design 04 For PresentationMelsougly BryceNo ratings yet
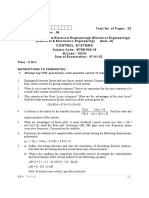
- Control Systems: Inst Ruct Ions T O Cand Idat EsDocument2 pagesControl Systems: Inst Ruct Ions T O Cand Idat Eseuforia hubNo ratings yet
- CS KOM Fin Jan2021-V2Document1 pageCS KOM Fin Jan2021-V2Osman Agâh YILDIRIMNo ratings yet
- Sample FinalDocument10 pagesSample FinalsharadpjadhavNo ratings yet
- QB BcsDocument10 pagesQB BcsKrishna Reddy Y.VNo ratings yet
- Control Systems: Inst Ruct Ions T O Cand Idat EsDocument2 pagesControl Systems: Inst Ruct Ions T O Cand Idat EsGurjinder SinghNo ratings yet
- Control Systems Engineering 5Document5 pagesControl Systems Engineering 5ANo ratings yet
- Reliability HotWireDocument17 pagesReliability HotWireLuis MatíasNo ratings yet
- Gujarat Technological University Biomedical EngineeringDocument3 pagesGujarat Technological University Biomedical EngineeringMandy745No ratings yet
- Short NotesDocument10 pagesShort Notesafzaalkhan100% (1)
- Adaptive Control Theory: IntroductionDocument19 pagesAdaptive Control Theory: IntroductionThanh NguyenNo ratings yet
- Course Title: Credit Units: Course Code: ELEC403: Annexure CD - 01'Document4 pagesCourse Title: Credit Units: Course Code: ELEC403: Annexure CD - 01'asad khanNo ratings yet
- Activity01 (1) CarreonDocument14 pagesActivity01 (1) CarreonHaja Kiev Erenz CarreonNo ratings yet
- Activity 03Document11 pagesActivity 03kennethNo ratings yet
- Movement of Poles-1Document6 pagesMovement of Poles-1Shahid FareedNo ratings yet
- Control SystemsDocument61 pagesControl SystemsBaji BabuNo ratings yet
- A Simple Method For Estimation of Parameters in First Order SystemsDocument13 pagesA Simple Method For Estimation of Parameters in First Order Systemskeyboard2014No ratings yet
- Lab #2: PI Controller Design and Second Order SystemsDocument4 pagesLab #2: PI Controller Design and Second Order SystemssamielmadssiaNo ratings yet
- Modeling and SimulationDocument29 pagesModeling and SimulationMuhammad Hammad Javed IqbalNo ratings yet
- Assessment 4 Total Marks - 100: B) Controlled VariableDocument16 pagesAssessment 4 Total Marks - 100: B) Controlled VariableAshikaNo ratings yet
- Lab-5 (Feedback Temperature Control)Document5 pagesLab-5 (Feedback Temperature Control)abdul.baseerNo ratings yet
- CS LabReport 3Document10 pagesCS LabReport 3Muhammad AfzaalNo ratings yet
- 5 BjyDocument317 pages5 BjyBilal ShahNo ratings yet
- CA1 Control System (Jan 2024)Document6 pagesCA1 Control System (Jan 2024)Ruvenderan SuburamaniamNo ratings yet
- 636f65a5d5f80SS Lab6 FAll2022Document7 pages636f65a5d5f80SS Lab6 FAll2022Muhammad YousafNo ratings yet
- ### Note V5 - Frequency Response WTH Bode Plot NEW VERSION 2023Document22 pages### Note V5 - Frequency Response WTH Bode Plot NEW VERSION 2023Okewunmi PaulNo ratings yet
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDocument14 pagesELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedNo ratings yet
- Department: Lab ManualDocument36 pagesDepartment: Lab ManualPragun SinghalNo ratings yet
- Control Systems Questions and Answers - Polar Plots: Prev NextDocument7 pagesControl Systems Questions and Answers - Polar Plots: Prev NextDevNo ratings yet
- Gujarat Technological University: Control Engineering Subject B.E. 5 SemesterDocument3 pagesGujarat Technological University: Control Engineering Subject B.E. 5 Semesterishan shahNo ratings yet
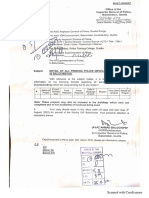
- Detail of Pending SchemesDocument2 pagesDetail of Pending SchemesMaMa BalochNo ratings yet
- FlOod Relief CellDocument1 pageFlOod Relief CellMaMa BalochNo ratings yet
- Convolution NotesDocument6 pagesConvolution NotesMaMa BalochNo ratings yet
- Bode DiagramsDocument15 pagesBode DiagramsMaMa BalochNo ratings yet
- Use of SCADA at Central Control Centre of Pakistan.: Group MembersDocument13 pagesUse of SCADA at Central Control Centre of Pakistan.: Group MembersMaMa BalochNo ratings yet
- Block Diagram Reduction NotesDocument6 pagesBlock Diagram Reduction NotesMaMa BalochNo ratings yet
- Use of SCADA at Central Control Centre of Pakistan.: Group MembersDocument13 pagesUse of SCADA at Central Control Centre of Pakistan.: Group MembersMaMa BalochNo ratings yet