You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Euler's Numerical Method ExplainedDocument20 pagesEuler's Numerical Method ExplainedUntitled SongNo ratings yet
- Ch-9, Math-5 Lecture Note Summer 20-21Document11 pagesCh-9, Math-5 Lecture Note Summer 20-21আসিফ রেজাNo ratings yet
- Opuscula Math 3205 PDFDocument8 pagesOpuscula Math 3205 PDFAntonio Torres PeñaNo ratings yet
- An Application of The Calculus of Variations To Sturm Liouville TheoryDocument13 pagesAn Application of The Calculus of Variations To Sturm Liouville TheorybobmezzNo ratings yet
- Final 05Document5 pagesFinal 05Sutirtha SenguptaNo ratings yet
- 4 - Proof of Existance and Uniqueness of SolutionsDocument12 pages4 - Proof of Existance and Uniqueness of SolutionsNobody KnowsNo ratings yet
- Revised Notes Fall 2017-2018 Mathematical Methods of Engineering Lecture Note 8 Ordinary Differential EquationsDocument11 pagesRevised Notes Fall 2017-2018 Mathematical Methods of Engineering Lecture Note 8 Ordinary Differential EquationsFred H HalderNo ratings yet
- Linear Differential Equation J&I PDFDocument77 pagesLinear Differential Equation J&I PDFscribdrayanNo ratings yet
- MA108-Lecture 1 - D3Document22 pagesMA108-Lecture 1 - D3Aditya DwivediNo ratings yet
- 5.1. Initial Value Problem - IVPDocument49 pages5.1. Initial Value Problem - IVPzulkoNo ratings yet
- Nsopde BookDocument40 pagesNsopde BookRahul RoyNo ratings yet
- Differential Equations LecturesDocument12 pagesDifferential Equations Lecturesabbasovn2005No ratings yet
- Ordinary Differential EquationDocument13 pagesOrdinary Differential EquationMich LadycanNo ratings yet
- Dynamical Systems: An LTCC CourseDocument53 pagesDynamical Systems: An LTCC CourseRoy VeseyNo ratings yet
- Numerical Solution of Ordinary Differential Equations: Euler and Modified Euler MethodDocument5 pagesNumerical Solution of Ordinary Differential Equations: Euler and Modified Euler MethodAhtisham ul haqNo ratings yet
- All Lectures Math3Document61 pagesAll Lectures Math3abbasovn2005No ratings yet
- Manifesto On Numerical Integration of Equations of Motion Using MatlabDocument10 pagesManifesto On Numerical Integration of Equations of Motion Using MatlabFuad ShafieNo ratings yet
- First Order PDEDocument13 pagesFirst Order PDEkcqywNo ratings yet
- Notes For Diffrentai EquationsDocument10 pagesNotes For Diffrentai EquationsAksyNo ratings yet
- Differential Equations: Course Module 3Document11 pagesDifferential Equations: Course Module 3Lorielle OlivaNo ratings yet
- Notes On Sturm-Liouville Differential Equations: 1 Recalling The Wave EquationDocument12 pagesNotes On Sturm-Liouville Differential Equations: 1 Recalling The Wave EquationSarthak VijayNo ratings yet
- Lecture Notes ODEsDocument46 pagesLecture Notes ODEsvongai chimbundeNo ratings yet
- Solving 2nd Order Linear Differential EquationsDocument11 pagesSolving 2nd Order Linear Differential EquationsDilham WahyudiNo ratings yet
- Fields: Fields) To Obtain Some Information About The BehaviourDocument5 pagesFields: Fields) To Obtain Some Information About The BehaviourMaxEconomicsNo ratings yet
- Solving ODEs using Euler's MethodDocument23 pagesSolving ODEs using Euler's MethodSheikh RiasatNo ratings yet
- AOEDEDocument21 pagesAOEDERamoni Z. S. AzevedoNo ratings yet
- Integral Equations Lecture NotesDocument122 pagesIntegral Equations Lecture NotesNdewura Jakpa0% (1)
- NumericalMethods UofVDocument182 pagesNumericalMethods UofVsaladsamurai100% (1)
- Differential Equations LecturesDocument13 pagesDifferential Equations LecturesRauliumNo ratings yet
- Set Valued Fractional Order DiffereDocument11 pagesSet Valued Fractional Order Differehovu.hutechNo ratings yet
- Differential Equations Notes: Author Vincent HuangDocument16 pagesDifferential Equations Notes: Author Vincent HuangVincent HuangNo ratings yet
- Second Order Linear Differential Equations: F (X, Y, Y, yDocument51 pagesSecond Order Linear Differential Equations: F (X, Y, Y, ydave lunaNo ratings yet
- MATH207 - Assignment 1Document1 pageMATH207 - Assignment 1BinoNo ratings yet
- 1st Order PDFDocument26 pages1st Order PDFkurakidNo ratings yet
- 5.1. Derivation of The Wave EquationDocument21 pages5.1. Derivation of The Wave EquationAlejandro RodriguezNo ratings yet
- Numerical Solutions of Differential Equations: Euler's MethodDocument9 pagesNumerical Solutions of Differential Equations: Euler's MethodVinayaga Murthy GNo ratings yet
- Agmon 1954Document11 pagesAgmon 1954anil.newscientistNo ratings yet
- Wilson-Theta Algorithm Approach To Solution of Dynamic Vibration EquationsDocument9 pagesWilson-Theta Algorithm Approach To Solution of Dynamic Vibration EquationscucrasNo ratings yet
- Chap 8 eDocument19 pagesChap 8 evenuNo ratings yet
- NM (Unit 4) NotesDocument16 pagesNM (Unit 4) NotesAxNo ratings yet
- Diapositivas Larco AguirreDocument18 pagesDiapositivas Larco AguirreWilson LawrenteNo ratings yet
- Lagrange Multipliers: Com S 477/577 Nov 18, 2008Document8 pagesLagrange Multipliers: Com S 477/577 Nov 18, 2008gzb012No ratings yet
- Partial Differential Equations (Week 2) First Order Pdes: Gustav Holzegel January 24, 2019Document16 pagesPartial Differential Equations (Week 2) First Order Pdes: Gustav Holzegel January 24, 2019PLeaseNo ratings yet
- Exponential function properties and differential equationsDocument5 pagesExponential function properties and differential equationsAlonso Pablo Olivares LagosNo ratings yet
- N S O D E: Umerical Olution OF Rdinary Ifferential QuationsDocument3 pagesN S O D E: Umerical Olution OF Rdinary Ifferential QuationsAyush BhadauriaNo ratings yet
- Averaging Methods for Perturbed ProblemsDocument8 pagesAveraging Methods for Perturbed ProblemsMadushanka SugathNo ratings yet
- Notes 220 17 PDFDocument88 pagesNotes 220 17 PDFRobin BrownNo ratings yet
- Topic 2Document9 pagesTopic 2HENRY ZULUNo ratings yet
- Persamaan GelombangDocument7 pagesPersamaan GelombangHikmah InsyirahNo ratings yet
- Module 1Document5 pagesModule 1arzNo ratings yet
- Spiral Singularities of A SemiflowDocument14 pagesSpiral Singularities of A SemiflowKamil DunstNo ratings yet
- Diffeq 1Document74 pagesDiffeq 1José UrrietaNo ratings yet
- First OrderDocument113 pagesFirst Orderaadelaide083No ratings yet
- Ordinary Differential Equations 1: Dhriti Ranjan DolaiDocument31 pagesOrdinary Differential Equations 1: Dhriti Ranjan DolaiSoumya Ranjan SahooNo ratings yet
- ODE Mathematical PhysicsDocument9 pagesODE Mathematical PhysicsHow to do anything By HimanshuNo ratings yet
- Numerical Methods For Second Order Differential EquationDocument15 pagesNumerical Methods For Second Order Differential Equationfarshan296015No ratings yet
- Numerical Solution of Ordinary Differential EquationsDocument5 pagesNumerical Solution of Ordinary Differential EquationsAl Asad Nur RiyadNo ratings yet
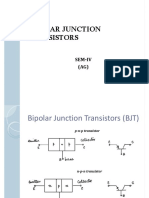
- 1 Bipolar Junction TransistorsDocument20 pages1 Bipolar Junction TransistorsInto The UniverseNo ratings yet
- Transistor Biasing Techniques and Operating Point AnalysisDocument25 pagesTransistor Biasing Techniques and Operating Point AnalysisInto The UniverseNo ratings yet
- Paper 4Document15 pagesPaper 4Into The UniverseNo ratings yet
- Euler Method Explained for Solving First-Order ODEsDocument9 pagesEuler Method Explained for Solving First-Order ODEsInto The UniverseNo ratings yet
- Marine Engine Application and Installation Guide: - Boat PerformanceDocument13 pagesMarine Engine Application and Installation Guide: - Boat Performancefernando hutnikNo ratings yet
- VIM - 2012 Edition PDFDocument111 pagesVIM - 2012 Edition PDFCurtis KellerNo ratings yet
- SAIVEERA ACADEMY’S GUIDE TO 12TH CHEMISTRY UNIT 1 METALLURGYDocument26 pagesSAIVEERA ACADEMY’S GUIDE TO 12TH CHEMISTRY UNIT 1 METALLURGYKrish Krishn100% (1)
- Controlling Water Level Using SensorsDocument3 pagesControlling Water Level Using SensorsnandeeshNo ratings yet
- Cat ThermoMETER InfraredDocument56 pagesCat ThermoMETER InfraredspyrosNo ratings yet
- Bernard Le Méhauté (Auth.) - An Introduction To Hydrodynamics and Water Waves-Springer Berlin Heidelberg (1976)Document326 pagesBernard Le Méhauté (Auth.) - An Introduction To Hydrodynamics and Water Waves-Springer Berlin Heidelberg (1976)rafdi80% (5)
- AC800F F2K Connect B1 6.2 CONFIGURATIONDocument43 pagesAC800F F2K Connect B1 6.2 CONFIGURATIONassessorNo ratings yet
- Model Question Paper WeldingDocument4 pagesModel Question Paper Weldingjasminnee100% (1)
- Course: EC2P001 Introduction To Electronics Lab: Indian Institute of Technology Bhubaneswar School of Electrical ScienceDocument5 pagesCourse: EC2P001 Introduction To Electronics Lab: Indian Institute of Technology Bhubaneswar School of Electrical ScienceAnik ChaudhuriNo ratings yet
- Band Pass Filter Lab, A Discussion of The Mechanism of Op-AmpsDocument6 pagesBand Pass Filter Lab, A Discussion of The Mechanism of Op-AmpsJoe O'Hara100% (2)
- Stat 122Document22 pagesStat 122Dexter RubionNo ratings yet
- Course Web Page Causal Inference (Part III, Michaelmas 2020) - Qingyuan Zhao's WebsiteDocument120 pagesCourse Web Page Causal Inference (Part III, Michaelmas 2020) - Qingyuan Zhao's WebsiteMa GaNo ratings yet
- 1000 Startup Digital WorkshopDocument84 pages1000 Startup Digital WorkshopVicky Yoga INo ratings yet
- Mtmtipmbprima30gb 091020035130 Phpapp01Document49 pagesMtmtipmbprima30gb 091020035130 Phpapp01Udo Iheanacho100% (4)
- Foundation Pads - MPA - EC2Document1 pageFoundation Pads - MPA - EC2mayphyoNo ratings yet
- Thesis SummaryDocument31 pagesThesis Summary2007.Restidar SoedartoNo ratings yet
- Cambridge IGCSE Physics Block4 ElectricityDocument8 pagesCambridge IGCSE Physics Block4 ElectricityRattee SirirojtanadolNo ratings yet
- General Purpose & Power Relays GuideDocument20 pagesGeneral Purpose & Power Relays GuideMahesh KumbharNo ratings yet
- Video Links For 7 Week Primer-NewDocument14 pagesVideo Links For 7 Week Primer-NewmaxnealblogNo ratings yet
- Instrument Note RangesDocument11 pagesInstrument Note RangesWalter Macasiano GravadorNo ratings yet
- Practice 24 - PDB Cloning and Relocation Using DBCADocument11 pagesPractice 24 - PDB Cloning and Relocation Using DBCALogis M100% (1)
- Colour Code - WordDocument1 pageColour Code - WordDivy NaiNo ratings yet
- Advanced Aspects SpectrosDocument548 pagesAdvanced Aspects SpectrosPraveen Mishra100% (3)
- AN-101D Parking Sensor User Manual-202011-V1.3Document25 pagesAN-101D Parking Sensor User Manual-202011-V1.3Istar DMNo ratings yet
- Log AssignmentDocument4 pagesLog AssignmentguranshsaranNo ratings yet
- Readme LADSPA Plugins-WinDocument2 pagesReadme LADSPA Plugins-WineduhideoNo ratings yet
- C#Web Basics SQLDocument113 pagesC#Web Basics SQLachyut.KendreNo ratings yet
- CHM 256: Basic Analytical Chemistry: Evaluation of Experimental DataDocument42 pagesCHM 256: Basic Analytical Chemistry: Evaluation of Experimental DataSPMUSER9ANo ratings yet
- SE1Document5 pagesSE1AlexisNo ratings yet
- Torque-Tension Relationship For Metric Fasteners Property Class 4.6, 8.8, 10.9 & 12.9Document1 pageTorque-Tension Relationship For Metric Fasteners Property Class 4.6, 8.8, 10.9 & 12.9krixotNo ratings yet