You might also like
- 1 Mechanics: Cbse Neet JEE Mains AdvancedDocument11 pages1 Mechanics: Cbse Neet JEE Mains Advancedvsrajkumar100% (6)
- PP Connection Design According To en 1993-1-8Document74 pagesPP Connection Design According To en 1993-1-8Alexandru Lupusoru100% (1)
- Bolt Tightening ProceedureT17B02-CM03-015Document17 pagesBolt Tightening ProceedureT17B02-CM03-015jahaan100% (1)
- Slope Deflection MethodDocument8 pagesSlope Deflection Methodpankaj_97No ratings yet
- Kanis Method of Frame AnalysisDocument20 pagesKanis Method of Frame AnalysisInemesit Ekop85% (20)
- Wind Energy Preparation 06 Aerodynamics QuizDocument10 pagesWind Energy Preparation 06 Aerodynamics QuizPedro Galvani67% (9)
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Neles Seat Leakage SpecDocument9 pagesNeles Seat Leakage SpecIkhsan Ly100% (1)
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Klein Technical GuidelineDocument21 pagesKlein Technical GuidelinePeter100% (2)
- Catalogo Motor Honda GX630Document28 pagesCatalogo Motor Honda GX630Paulo RibeiroNo ratings yet
- ASME StandardsDocument8 pagesASME Standardsanappan100% (1)
- MODULE 4 Fluid Mechanics BSEDDocument17 pagesMODULE 4 Fluid Mechanics BSEDMaden beto100% (1)
- Esquema Elétrico 8HP45Document7 pagesEsquema Elétrico 8HP45HatusNo ratings yet
- HW 01 SolutionDocument12 pagesHW 01 SolutionJuan Sebastian Suarez Ospina63% (8)
- Flywheel 2Document6 pagesFlywheel 2hassaneabdo2020No ratings yet
- Balancing Test Lab Objective:: Structures/Motion Lab 20-263-571, Sections 001, 002, 003Document14 pagesBalancing Test Lab Objective:: Structures/Motion Lab 20-263-571, Sections 001, 002, 003dr_oxide2No ratings yet
- Chapter 05Document25 pagesChapter 05Pratham sehgalNo ratings yet
- Creating Tyre Models From NothingDocument9 pagesCreating Tyre Models From NothingSatvik VatsaNo ratings yet
- Lab 3 - Inverse and Forward KinematicsDocument9 pagesLab 3 - Inverse and Forward KinematicsRafael MarcondesNo ratings yet
- EE457-Stability 3Document15 pagesEE457-Stability 3Fengxing ZhuNo ratings yet
- Ceiling FANDocument16 pagesCeiling FANAtul ThakurNo ratings yet
- Averaging BearingsDocument3 pagesAveraging BearingspbeauvilNo ratings yet
- 2 Symposium On The Lift and Escalator TechnologiesDocument9 pages2 Symposium On The Lift and Escalator TechnologiesfreddyjoertyNo ratings yet
- Cam Experimental Lab: ObjectiveDocument8 pagesCam Experimental Lab: ObjectiveMuhammad Changez Khan100% (2)
- ProblemswithSolutions Chapter2Document26 pagesProblemswithSolutions Chapter2samanmech100% (1)
- Wolfe ConditionsDocument5 pagesWolfe ConditionsRaviKumarNo ratings yet
- Direct Drive and Servo MotorsDocument8 pagesDirect Drive and Servo MotorsChandaKundaNo ratings yet
- Motor Sizing Basics Part 1 How To Calculate Load TorqueDocument6 pagesMotor Sizing Basics Part 1 How To Calculate Load Torquefog900No ratings yet
- Homework 02Document6 pagesHomework 02Ben MacKenzieNo ratings yet
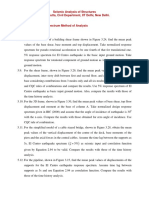
- Exercise Problems:: Seismic Analysis of Structures by TK Dutta, Civil Department, IIT Delhi, New DelhiDocument19 pagesExercise Problems:: Seismic Analysis of Structures by TK Dutta, Civil Department, IIT Delhi, New Delhitarang shethNo ratings yet
- Lab Report Worm GearDocument7 pagesLab Report Worm GearAhmed Jazlaan Fahmy0% (1)
- Trasmision - Eng-Calculus EquationsDocument6 pagesTrasmision - Eng-Calculus EquationsNita SebastianNo ratings yet
- CME362 Programming AssignmentDocument15 pagesCME362 Programming AssignmentstonehoffNo ratings yet
- Analisis Del Pendulo InvertidoDocument5 pagesAnalisis Del Pendulo InvertidoFulanito UnoNo ratings yet
- Practical Session 3: Inverse Dynamics: Arturo Gil AparicioDocument15 pagesPractical Session 3: Inverse Dynamics: Arturo Gil AparicioJpablo MartinezNo ratings yet
- Physics 1120: Rotational Kinematics SolutionsDocument7 pagesPhysics 1120: Rotational Kinematics SolutionsNykia Bhelle Lansangan CarpioNo ratings yet
- PHYS 1120 Rotational Kinematics SolutionsDocument7 pagesPHYS 1120 Rotational Kinematics SolutionsEnger AlingasaNo ratings yet
- Epicyclic Gear TrainDocument12 pagesEpicyclic Gear TrainAtharva Bhope100% (1)
- Experiment 106. Stabilisation of A Rotary Inverted Pendulum 1 ObjectiveDocument11 pagesExperiment 106. Stabilisation of A Rotary Inverted Pendulum 1 ObjectiveAmine Y. AlamiNo ratings yet
- Chapter 3 (Slope Deflection)Document47 pagesChapter 3 (Slope Deflection)Kiran Koraddi100% (1)
- Chapter 3 FlywheelDocument14 pagesChapter 3 Flywheelpixelo09No ratings yet
- Fuzzy Logic Control of A Switched Reluctance MotorDocument5 pagesFuzzy Logic Control of A Switched Reluctance MotorKarthi KumarNo ratings yet
- Postability Post Processor DocumentationDocument15 pagesPostability Post Processor DocumentationMustapha BenabedNo ratings yet
- International Airline Passengers International Airline PassengersDocument8 pagesInternational Airline Passengers International Airline PassengersngojchieernNo ratings yet
- Damped Simple Harmonic Motion: Department of Physics and Nanotechnology SRM Institute of Science and TechnologyDocument16 pagesDamped Simple Harmonic Motion: Department of Physics and Nanotechnology SRM Institute of Science and TechnologyRohan MohataNo ratings yet
- Anadi Anant JainDocument118 pagesAnadi Anant JainAnadi Anant JainNo ratings yet
- Mathematical StudiesDocument56 pagesMathematical StudiesOayes MiddaNo ratings yet
- Efficiency of Planetary GearsetsDocument12 pagesEfficiency of Planetary GearsetskazdanoNo ratings yet
- Solution 2Document5 pagesSolution 2Paulina MarquezNo ratings yet
- Mark Scheme (Results) Summer 2007: Mathematics Mecha Ic GCE N S M2 (6678)Document9 pagesMark Scheme (Results) Summer 2007: Mathematics Mecha Ic GCE N S M2 (6678)dasha962No ratings yet
- VSDC Spring 2016 Homework 01Document12 pagesVSDC Spring 2016 Homework 01hilgadNo ratings yet
- AN00122-003 - Rotary Axis Flying ShearDocument6 pagesAN00122-003 - Rotary Axis Flying ShearamirixmNo ratings yet
- EEE229 EEE223 GEE202 Problem 1 A SolutionsDocument3 pagesEEE229 EEE223 GEE202 Problem 1 A SolutionslordeinstNo ratings yet
- TUe 4AUB20 Exercise4Document5 pagesTUe 4AUB20 Exercise4Saad ullah ZiaNo ratings yet
- Motor Sizing Basics Part 1-4Document37 pagesMotor Sizing Basics Part 1-4M A JomahNo ratings yet
- Classical Mechanics With MATLAB Applications: Corrections ToDocument10 pagesClassical Mechanics With MATLAB Applications: Corrections ToSuhailUmarNo ratings yet
- EjercicioS RESISTENCIADocument7 pagesEjercicioS RESISTENCIAsalvadorNo ratings yet
- EGR 2513.001 and MT Exam #2 002: Spring 2014 Review ProblemsDocument20 pagesEGR 2513.001 and MT Exam #2 002: Spring 2014 Review ProblemsclinthopkinsNo ratings yet
- Ch2 HW2 SolutionsDocument8 pagesCh2 HW2 SolutionsCharles YamashiroNo ratings yet
- A Method of Inverse Kinematics Solution Including Singular and Multiple Con®gurations For A Class of Robotic ManipulatorsDocument17 pagesA Method of Inverse Kinematics Solution Including Singular and Multiple Con®gurations For A Class of Robotic ManipulatorsBENLAHRECH Djamal EddNo ratings yet
- Analytical Derivation of Induction Motors Inductances Under Eccentricity ConditionsDocument16 pagesAnalytical Derivation of Induction Motors Inductances Under Eccentricity ConditionsBui TrungTuyen (Beo)No ratings yet
- Research Article: DC Motor Parameter Identification Using Speed Step ResponsesDocument5 pagesResearch Article: DC Motor Parameter Identification Using Speed Step ResponsesDawn VargasNo ratings yet
- Epicyclic Gear Train Write UpDocument8 pagesEpicyclic Gear Train Write UpkulkajinkyaNo ratings yet
- Shape Memory Alloy Actuators: Design, Fabrication, and Experimental EvaluationFrom EverandShape Memory Alloy Actuators: Design, Fabrication, and Experimental EvaluationNo ratings yet
- 30gt Flyer Chiller - CarrierDocument4 pages30gt Flyer Chiller - Carrierdelmar02No ratings yet
- Lesson Plan Mechanical VibrationsDocument3 pagesLesson Plan Mechanical VibrationsBasavarajAngadiNo ratings yet
- Acknowledgement: Name FacultyDocument23 pagesAcknowledgement: Name FacultySurendra JoshiNo ratings yet
- Seawater CoolingDocument1 pageSeawater CoolingJohnarey Galve PantuaNo ratings yet
- CPL Written Exam Answers-1Document8 pagesCPL Written Exam Answers-1Anthony DiasNo ratings yet
- Katalog Aria Connect En-1Document24 pagesKatalog Aria Connect En-1fred.pingasNo ratings yet
- CombinepdfDocument46 pagesCombinepdfwinder chanta peñaNo ratings yet
- Group 5 - Herald & Spitfire - Chassis Frame - Body - Dust and Water SealingDocument138 pagesGroup 5 - Herald & Spitfire - Chassis Frame - Body - Dust and Water Sealingalex_christiebNo ratings yet
- SyllabusDocument97 pagesSyllabusVignesh GuruNo ratings yet
- Laboratory Manual DNT 242 Machine Mechanism Element: Cam and FollowerDocument6 pagesLaboratory Manual DNT 242 Machine Mechanism Element: Cam and FollowerRajasekharKosuruNo ratings yet
- Price List LPG Sapphire LPCB 25-11-2019Document8 pagesPrice List LPG Sapphire LPCB 25-11-2019kidmuNo ratings yet
- Improving The Metal Casting Quality Using High-Permeability Sand Aggregates - Part 03Document2 pagesImproving The Metal Casting Quality Using High-Permeability Sand Aggregates - Part 03Oscar SotomayorNo ratings yet
- Dacm PT1Document2 pagesDacm PT1Vieru CiprianNo ratings yet
- TM9 710 1944Document360 pagesTM9 710 1944Joseph MetrzNo ratings yet
- Topic 6 (Doppler Effect)Document7 pagesTopic 6 (Doppler Effect)Lindokuhle CebekhuluNo ratings yet
- Design of Off Shor Structures IIT Professor Presentation PDFDocument20 pagesDesign of Off Shor Structures IIT Professor Presentation PDFPremalatha JeyaramNo ratings yet
- 1.7 Safeties in Steering GearsDocument6 pages1.7 Safeties in Steering GearsAshish B PandeyNo ratings yet
- Module 4 - Position Vector, Velocity and Acceleration R - 478cb81cb2c788e5e0b86398 - 1Document4 pagesModule 4 - Position Vector, Velocity and Acceleration R - 478cb81cb2c788e5e0b86398 - 1Lvly FranciaNo ratings yet
- Valves Flow Pressure Temperature LiquidDocument1 pageValves Flow Pressure Temperature LiquidFitria Thebest InYourlifeNo ratings yet
- Viar Lock Inglese High Res PDFDocument40 pagesViar Lock Inglese High Res PDFvantayusdNo ratings yet
- Solidworks FEA Model Type: Linear & NonlinearDocument16 pagesSolidworks FEA Model Type: Linear & NonlinearKuen WongNo ratings yet
- KFC - Remera II - Mechanicall PlansDocument3 pagesKFC - Remera II - Mechanicall PlansHazem EsamNo ratings yet