You might also like
- Chapter 7 Equations and LogarithmsDocument34 pagesChapter 7 Equations and LogarithmsJojobaby5171467% (3)
- Cmfe f2023 hw02Document5 pagesCmfe f2023 hw02hophuoclanhNo ratings yet
- Gaussian Elimination and Lu DecompositionDocument4 pagesGaussian Elimination and Lu DecompositionapuroopmNo ratings yet
- Computation of Matrix Exponentials of Special MatricesDocument16 pagesComputation of Matrix Exponentials of Special MatricesTadiyos Hailemichael MamoNo ratings yet
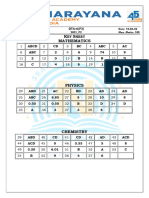
- 22 01 2024 SR Super60 Elite, Target & LIIT BTs Jee MainDocument14 pages22 01 2024 SR Super60 Elite, Target & LIIT BTs Jee MainasdfNo ratings yet
- Midsem Ee650 Fall2018-Solution IITKDocument8 pagesMidsem Ee650 Fall2018-Solution IITKJivnesh SandhanNo ratings yet
- Operational Research QuestionsDocument4 pagesOperational Research Questions8783Amogh ManikothNo ratings yet
- Supplement To Chapter 6: Linear Programming: Answers To Discussion and Review QuestionsDocument37 pagesSupplement To Chapter 6: Linear Programming: Answers To Discussion and Review Questionsma_sadam100% (1)
- Numericalsolutionsofthird OrdersystemofboundaryvaueproblemsAppl - Math.comput.1902007332 338.Document8 pagesNumericalsolutionsofthird OrdersystemofboundaryvaueproblemsAppl - Math.comput.1902007332 338.Sayiqa JabeenNo ratings yet
- Lockwood - HW#6 (MER-516)Document9 pagesLockwood - HW#6 (MER-516)MGLockwoodNo ratings yet
- Exercise Prod Design PracticingDocument9 pagesExercise Prod Design PracticingLaura AlósNo ratings yet
- Improvement in Aes and Ecc: Submitted By: Shabir Ahmad Magray 19MMS010Document14 pagesImprovement in Aes and Ecc: Submitted By: Shabir Ahmad Magray 19MMS010Shabir9237No ratings yet
- Applied Mathematical Modelling: R.C. Mittal, R.K. JainDocument19 pagesApplied Mathematical Modelling: R.C. Mittal, R.K. JainSyeda Tehmina EjazNo ratings yet
- Euclid's AlgorithmDocument16 pagesEuclid's AlgorithmNelson OliveiraNo ratings yet
- Junkai Xie and Jonathan Tennyson - Variational Calculations of Vibrational Energy Levels For XY4 Molecules 2: Bending States of MethaneDocument10 pagesJunkai Xie and Jonathan Tennyson - Variational Calculations of Vibrational Energy Levels For XY4 Molecules 2: Bending States of MethaneWippetsxzNo ratings yet
- PPT - Modular Arithmetic and Its ApplicationsDocument80 pagesPPT - Modular Arithmetic and Its ApplicationsChona BautistaNo ratings yet
- Western Constructions Case - MS15A051Document3 pagesWestern Constructions Case - MS15A051Anju SavithriNo ratings yet
- Assignment ProblemDocument24 pagesAssignment ProblemChel BartNo ratings yet
- Cams DesignDocument41 pagesCams DesigngcldesignNo ratings yet
- Assignment 2 Management ScienceDocument5 pagesAssignment 2 Management ScienceCheah Cheok NamNo ratings yet
- B-Spline Interpolation Compared With Finite DifferenceDocument8 pagesB-Spline Interpolation Compared With Finite DifferenceIsrael Najera MartinezNo ratings yet
- CAT 2009 Quant Test 72Document3 pagesCAT 2009 Quant Test 72comploreNo ratings yet
- Emp A Rrilla DosDocument6 pagesEmp A Rrilla DosapalosecoNo ratings yet
- EVEN11Document37 pagesEVEN11David GMNo ratings yet
- 33 Code VitaDocument31 pages33 Code VitaDeborah MohanNo ratings yet
- Parametric CurvesDocument16 pagesParametric CurvesSayan PalNo ratings yet
- 4.3. The QR Reduction: QR A A QR (Q (R ( (Ax B ( ( (Ax B (Ax XDocument19 pages4.3. The QR Reduction: QR A A QR (Q (R ( (Ax B ( ( (Ax B (Ax XSonata SoniNo ratings yet
- 7 Maths 1 Pre Mid Term Paper and SolutionDocument10 pages7 Maths 1 Pre Mid Term Paper and SolutionsvpchandolaNo ratings yet
- Aoe/Esm-4084 Solution of Homework 1: Clearall at DDocument33 pagesAoe/Esm-4084 Solution of Homework 1: Clearall at DLawrence PatrickNo ratings yet
- 2 - Rectificadores - I - v1Document28 pages2 - Rectificadores - I - v1Juan Pablo Luna ValdesNo ratings yet
- The MODI and VAM Methods of Solving Transportation Problems: CD TutorialDocument6 pagesThe MODI and VAM Methods of Solving Transportation Problems: CD TutorialEgidius PutrandoNo ratings yet
- ME122-1P - Cam-Follower Motion - wk2 - wk3 - wk4Document55 pagesME122-1P - Cam-Follower Motion - wk2 - wk3 - wk4Llana FroilanNo ratings yet
- Kinematics, Dynamics, and Design of Machinery 2nd Edition by Waldron Kinzel Chapter 8Document87 pagesKinematics, Dynamics, and Design of Machinery 2nd Edition by Waldron Kinzel Chapter 8JoJo11436390% (10)
- Exp-Function Method For Nonlinear Wave Equations: Ji-Huan He, Xu-Hong WuDocument9 pagesExp-Function Method For Nonlinear Wave Equations: Ji-Huan He, Xu-Hong Wufalcon_vamNo ratings yet
- G7 Revision QuestionsDocument10 pagesG7 Revision QuestionsNaman MishraNo ratings yet
- Practice Paper 2 EJC H1 2020 Prelim SolutionDocument21 pagesPractice Paper 2 EJC H1 2020 Prelim SolutionOb oNo ratings yet
- Topper 2 110 7 3 Mathematics Solution Up201711131302 1510558365 276Document11 pagesTopper 2 110 7 3 Mathematics Solution Up201711131302 1510558365 276UMANo ratings yet
- 18.04.24 - Osr - Star Co-Sc - Jee-Adv - 2021 - P2 - Gta-6 (P2) - KDocument14 pages18.04.24 - Osr - Star Co-Sc - Jee-Adv - 2021 - P2 - Gta-6 (P2) - KbalramsharmaNo ratings yet
- CS101 Midterm 2016Document14 pagesCS101 Midterm 2016M HarisNo ratings yet
- Unit 1 - Mesh Analysis Part 3Document25 pagesUnit 1 - Mesh Analysis Part 3ece placementNo ratings yet
- Compound and Absolute Value Inequalities HWDocument4 pagesCompound and Absolute Value Inequalities HWCharlston ChavezNo ratings yet
- CSEC Maths - Paper 2 - January 2023 - SolutionDocument35 pagesCSEC Maths - Paper 2 - January 2023 - Solutionirenebutterfly9No ratings yet
- Foundation Booklet 2024Document128 pagesFoundation Booklet 2024Lahiru ChamodNo ratings yet
- Bidimensional Laminar Flow Around A Circular Cylinder: 3.1 Description of The CaseDocument32 pagesBidimensional Laminar Flow Around A Circular Cylinder: 3.1 Description of The CaseKelvin XuNo ratings yet
- Solutions RegressionTutorialDocument51 pagesSolutions RegressionTutorialARBIN RAJNo ratings yet
- Hardy Cross XXDocument17 pagesHardy Cross XXprajmenNo ratings yet
- 2021 P1 Maths Revisions MGSDocument42 pages2021 P1 Maths Revisions MGSyijiacheng2016No ratings yet
- Homework #5Document2 pagesHomework #5M shayan JavedNo ratings yet
- Sheet 1Document3 pagesSheet 1zhraahmed010No ratings yet
- Example 1 (Adopt From Hibbler Ex15-4, PG 578) : Lecture Note: Beam Analysis by Stiffness MethodDocument11 pagesExample 1 (Adopt From Hibbler Ex15-4, PG 578) : Lecture Note: Beam Analysis by Stiffness Methoddixn__No ratings yet
- An Evaluation of The GCI For Unstructured GridsDocument33 pagesAn Evaluation of The GCI For Unstructured GridsSachin RoutNo ratings yet
- SSLC Mathematics Chapter 1 Real Numbers in EnglishDocument11 pagesSSLC Mathematics Chapter 1 Real Numbers in EnglishNoothan NandithaNo ratings yet
- E B H A B H I B HDocument7 pagesE B H A B H I B HMihai BolinteanuNo ratings yet
- Made Easy: GATE Classroom Test Series-2013Document11 pagesMade Easy: GATE Classroom Test Series-2013Lovely SinhaNo ratings yet
- m16 Operation On SurdsDocument24 pagesm16 Operation On SurdsMichael McneilNo ratings yet
- Advanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionFrom EverandAdvanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNo ratings yet
- Afsar 2019Document42 pagesAfsar 2019Kaustav LahiriNo ratings yet
- Lheureux 2014Document6 pagesLheureux 2014Kaustav LahiriNo ratings yet
- Participation in QuizDocument1 pageParticipation in QuizKaustav LahiriNo ratings yet
- Biology For Engineers PDFDocument209 pagesBiology For Engineers PDFKaustav LahiriNo ratings yet