You might also like
- 2.sensors and TransducersDocument100 pages2.sensors and TransducersKelvin RaoNo ratings yet
- Electronic Measurements and Instrumentation PPT SlidesDocument35 pagesElectronic Measurements and Instrumentation PPT SlidesAmit Shukla100% (3)
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageFrom EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageNo ratings yet
- Columbus Files Motion To Dismiss Bankruptcy Claim by Latitude Five25 OwnersDocument38 pagesColumbus Files Motion To Dismiss Bankruptcy Claim by Latitude Five25 OwnersWSYX/WTTENo ratings yet
- Mechatronics Test Questions Set - 1Document13 pagesMechatronics Test Questions Set - 1ChippyVijayanNo ratings yet
- MOV ManualDocument88 pagesMOV ManualSakthi Sekar CbiNo ratings yet
- Astm A 182-2021Document17 pagesAstm A 182-2021Mohammed AliNo ratings yet
- Robotic SensorsDocument43 pagesRobotic SensorsArivukkarasan RajaNo ratings yet
- Sensor: Microsensor Reaches A Significantly Higher Speed and Sensitivity Compared WithDocument7 pagesSensor: Microsensor Reaches A Significantly Higher Speed and Sensitivity Compared WithMaratur RoifahNo ratings yet
- SensorDocument8 pagesSensorSachin MauryaNo ratings yet
- Sensor: From Wikipedia, The Free EncyclopediaDocument5 pagesSensor: From Wikipedia, The Free EncyclopediaDaniel MacukaNo ratings yet
- Sensor deviation causes and typeseditDocument1 pageSensor deviation causes and typeseditseqNo ratings yet
- Sensor TechnologyDocument25 pagesSensor TechnologyRahul SahuNo ratings yet
- Week-1_CDocument59 pagesWeek-1_Csachin2017starsNo ratings yet
- Sensor Classification and How To Choose A SensorDocument7 pagesSensor Classification and How To Choose A SensorAkhilesh Reddy KarraNo ratings yet
- SensorDocument15 pagesSensorsultansingh007No ratings yet
- Iot Module 2Document12 pagesIot Module 2nagaraj pNo ratings yet
- Instrumentation and Sensor TechnologiesDocument11 pagesInstrumentation and Sensor TechnologiesShrikarShuklaNo ratings yet
- Electronics: sensors and signal conditioning overviewDocument62 pagesElectronics: sensors and signal conditioning overviewHahhaah BbbNo ratings yet
- Unit IiiDocument11 pagesUnit IiiCbitpavan ReddyNo ratings yet
- Sensors (Disambiguation) Detector (Radio) Censor Censure CenserDocument2 pagesSensors (Disambiguation) Detector (Radio) Censor Censure CenserseqNo ratings yet
- Lecture SensoricsDocument91 pagesLecture SensoricsUlfan İbrhmvNo ratings yet
- Robotics Unit3 SensorsDocument120 pagesRobotics Unit3 SensorsJanarthanan BalakrishnasamyNo ratings yet
- Bablu Banarasi Das NITM Sensor Lecture NotesDocument4 pagesBablu Banarasi Das NITM Sensor Lecture NotesArpit SharmaNo ratings yet
- Sensing the IoTDocument59 pagesSensing the IoTkavitha reddyNo ratings yet
- Prepared By: Engr. Nemilyn I. Angeles-FadcharDocument27 pagesPrepared By: Engr. Nemilyn I. Angeles-FadcharJaime-Nemilyn Ati-id FadcharNo ratings yet
- CA5305 Lecture 2 on SensorsDocument18 pagesCA5305 Lecture 2 on SensorsHarini IyerNo ratings yet
- IoT SensorsDocument15 pagesIoT Sensorsbikash20ugNo ratings yet
- IoT Module 2 IoT Sensing and ActuationDocument25 pagesIoT Module 2 IoT Sensing and Actuationabhishek.ecNo ratings yet
- Chapter 3 Part 1 Sensor and TransducersDocument48 pagesChapter 3 Part 1 Sensor and TransducersFikadu Eshetu100% (1)
- Mechanical Engineering Mechatronics Sensors-And-signal-processing NotesDocument56 pagesMechanical Engineering Mechatronics Sensors-And-signal-processing NotesPritam OjhaNo ratings yet
- 2.1. LLF - GSP - L2L - Introduction To Integrated Circuits and Sensors - Training PresentationDocument23 pages2.1. LLF - GSP - L2L - Introduction To Integrated Circuits and Sensors - Training PresentationArnav SaxenaNo ratings yet
- SensorDocument16 pagesSensorTaha AzaddNo ratings yet
- Introduction To Sensors in MechatronicsDocument20 pagesIntroduction To Sensors in MechatronicsRadhaMadhavNo ratings yet
- CO2 NotesDocument71 pagesCO2 NotesShabbir AliNo ratings yet
- Sensor & Iot - Unit 2Document29 pagesSensor & Iot - Unit 2Biswa RocksNo ratings yet
- SENSOR and Signal Processing UnitDocument57 pagesSENSOR and Signal Processing UnitRohit Ghulanavar100% (1)
- Electronic Component Computer Processor Light Computer Tactile SensorDocument6 pagesElectronic Component Computer Processor Light Computer Tactile SensorFrezer BelayNo ratings yet
- Biomems 1 IntroDocument19 pagesBiomems 1 IntroprabhuNo ratings yet
- ME2402 Mechatronics Lecture Notes PDFDocument108 pagesME2402 Mechatronics Lecture Notes PDFShueab Mujawar91% (11)
- Sensors: 3.1.1 What Is A SensorDocument13 pagesSensors: 3.1.1 What Is A SensorSravani NaiduNo ratings yet
- 1 2 3 4 5 6 7 8 MergedDocument133 pages1 2 3 4 5 6 7 8 MergedIA DipsNo ratings yet
- Q. What Is A Sensor? Explain Its Function ANSDocument11 pagesQ. What Is A Sensor? Explain Its Function ANSduddala1srikanthNo ratings yet
- Auto and Control Unit 1 Notes FinalDocument18 pagesAuto and Control Unit 1 Notes Finalsupriya kharageNo ratings yet
- Chapter Two (Instrumentation)Document26 pagesChapter Two (Instrumentation)tsehay girmaNo ratings yet
- Lec 1Document16 pagesLec 1IA DipsNo ratings yet
- Sensore 2Document1 pageSensore 2Kiruba EathirajNo ratings yet
- OIE 751 ROBOTICS Unit 3 Class 1 (11-9-2020)Document13 pagesOIE 751 ROBOTICS Unit 3 Class 1 (11-9-2020)MICHEL RAJNo ratings yet
- Measuring Sound Wavelengths using Ultrasonic Sensors and MicrocontrollersDocument8 pagesMeasuring Sound Wavelengths using Ultrasonic Sensors and MicrocontrollersAldy N SNo ratings yet
- Comparing Magnitudes of Some Variables With A Standard ValueDocument8 pagesComparing Magnitudes of Some Variables With A Standard Valueenok henaNo ratings yet
- IOT LAB-2Document18 pagesIOT LAB-2RavindranathNo ratings yet
- MOdule 2 - GivenDocument58 pagesMOdule 2 - Givensreeni 1005No ratings yet
- Sensors in Internet of ThingsDocument5 pagesSensors in Internet of ThingsAnkshu RayNo ratings yet
- Dead Band: The Range Through Which AnDocument3 pagesDead Band: The Range Through Which AntanveerpuNo ratings yet
- Mechatronics:: Unit I Mechatronics, Sensors and ActuatorsDocument31 pagesMechatronics:: Unit I Mechatronics, Sensors and ActuatorsChandra HasanNo ratings yet
- Unit 3 - Monitoring and ControlDocument13 pagesUnit 3 - Monitoring and ControlCLARA D SOUZA THOMASNo ratings yet
- Transduct 2Document3 pagesTransduct 2Marlene Grimaldo.No ratings yet
- Electrical Measurement Sensors GuideDocument17 pagesElectrical Measurement Sensors GuideCv mahisa CempakaNo ratings yet
- 402C Unit - 2 IoTDocument26 pages402C Unit - 2 IoTsatheeshNo ratings yet
- Sensors PPT NotesDocument23 pagesSensors PPT NotesUday sonwaneNo ratings yet
- Delta VFD 3Document2 pagesDelta VFD 3Kiruba EathirajNo ratings yet
- Limit Switch 3Document1 pageLimit Switch 3Kiruba EathirajNo ratings yet
- Delta VFD 3Document2 pagesDelta VFD 3Kiruba EathirajNo ratings yet
- Limit Switch 3Document1 pageLimit Switch 3Kiruba EathirajNo ratings yet
- Limit Switch 1Document1 pageLimit Switch 1Kiruba EathirajNo ratings yet
- Sensore 2Document1 pageSensore 2Kiruba EathirajNo ratings yet
- SensoreDocument1 pageSensoreKiruba EathirajNo ratings yet
- Two mechanical designs and programming methods for PLC systemsDocument2 pagesTwo mechanical designs and programming methods for PLC systemsKiruba EathirajNo ratings yet
- Service 5Document2 pagesService 5Kiruba EathirajNo ratings yet
- Two mechanical designs and programming methods for PLC systemsDocument2 pagesTwo mechanical designs and programming methods for PLC systemsKiruba EathirajNo ratings yet
- How sensors detect changes and send info to electronicsDocument1 pageHow sensors detect changes and send info to electronicsKiruba EathirajNo ratings yet
- Two Types of Mechanical Designs and Programming Methods for PLC SystemsDocument1 pageTwo Types of Mechanical Designs and Programming Methods for PLC SystemsKiruba EathirajNo ratings yet
- VFD 14Document1 pageVFD 14Kiruba EathirajNo ratings yet
- VFD controller: rectifier, DC link, inverterDocument1 pageVFD controller: rectifier, DC link, inverterKiruba EathirajNo ratings yet
- VFD 12Document1 pageVFD 12Kiruba EathirajNo ratings yet
- VFD 14Document1 pageVFD 14Kiruba EathirajNo ratings yet
- Week 7: Nurses Role in Disaster: Home Mitigation and PreparednessDocument10 pagesWeek 7: Nurses Role in Disaster: Home Mitigation and PreparednessRose Ann LacuarinNo ratings yet
- MX 201110 enDocument1,203 pagesMX 201110 envajrahastaNo ratings yet
- z1875 Caton (BMJ) Electric Currents of The BrainDocument23 pagesz1875 Caton (BMJ) Electric Currents of The BrainUnholy VladNo ratings yet
- Sampling and Field Testing at Wastewater Treatment FacilitiesDocument11 pagesSampling and Field Testing at Wastewater Treatment FacilitiesSundarapandiyan SundaramoorthyNo ratings yet
- New Patient Needing Continuous Renal Replacement Therapy (CRRT)Document9 pagesNew Patient Needing Continuous Renal Replacement Therapy (CRRT)sergey_1972No ratings yet
- Pneumatic Pruning Equipment American Arborist Supplies, Tree Care, Climbing EquipmentDocument1 pagePneumatic Pruning Equipment American Arborist Supplies, Tree Care, Climbing EquipmentSalman JoNo ratings yet
- Seminar Application of Nitrous Oxide in AutomobilesDocument20 pagesSeminar Application of Nitrous Oxide in AutomobilesSaikat BadyakarNo ratings yet
- Guillain Barre 3Document6 pagesGuillain Barre 3YON LEANDRO VILLAMIL ROJASNo ratings yet
- A Review: HPLC Method Development and Validation: November 2015Document7 pagesA Review: HPLC Method Development and Validation: November 2015R Abdillah AkbarNo ratings yet
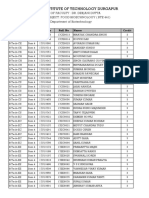
- List of Students Allotted in Open Elective Subjects (B. Tech and M. Tech (Dual Degree) Integrated MSc. - 4th Semester - Regular - 2018 - 19) - 2 PDFDocument26 pagesList of Students Allotted in Open Elective Subjects (B. Tech and M. Tech (Dual Degree) Integrated MSc. - 4th Semester - Regular - 2018 - 19) - 2 PDFArpan JaiswalNo ratings yet
- Kyle 106 - 119 - 131 - 141Document1 pageKyle 106 - 119 - 131 - 141Gerson SouzaNo ratings yet
- Lista de Precios Tones y Staleks 01.04Document3 pagesLista de Precios Tones y Staleks 01.04Maria T. OliverosNo ratings yet
- EE 102 Cabric Final Spring08 o Id15Document10 pagesEE 102 Cabric Final Spring08 o Id15Anonymous TbHpFLKNo ratings yet
- Brochure - 2018 - Hitfact Mkii 2Document2 pagesBrochure - 2018 - Hitfact Mkii 2diaa ahmedNo ratings yet
- Validation of Correlations Between A NSPT PDFDocument12 pagesValidation of Correlations Between A NSPT PDFAgus WahyudiNo ratings yet
- 3M CatalogueDocument32 pages3M Cataloguefandi.azs37No ratings yet
- Eutelsat 12 West A Satellite FootprintDocument2 pagesEutelsat 12 West A Satellite FootprintSkybrokersNo ratings yet
- Bosch EBike Product Catalogue MY2021 enDocument92 pagesBosch EBike Product Catalogue MY2021 enIvanNo ratings yet
- 9709 s15 QP 12Document4 pages9709 s15 QP 12Abrar JahinNo ratings yet
- 2GIG KEY2 345 Install GuideDocument2 pages2GIG KEY2 345 Install GuideAlarm Grid Home Security and Alarm MonitoringNo ratings yet
- SFM Issue Repor 15-4-2023Document3 pagesSFM Issue Repor 15-4-2023Esdras Fransua CisnerosNo ratings yet
- Dsa 5300Document8 pagesDsa 5300Nguyen Van ToanNo ratings yet
- Cattlemans Steakhouse MenuDocument1 pageCattlemans Steakhouse Menuapi-300741654No ratings yet
- RCS England Trainees Guide To A Quality Improvement Project 2021Document17 pagesRCS England Trainees Guide To A Quality Improvement Project 2021Wee K WeiNo ratings yet
- Terpin Hydrate Oral SolutionDocument1 pageTerpin Hydrate Oral SolutionAbelard Maria EscrivaNo ratings yet
- Preferred Drug ListDocument2 pagesPreferred Drug ListRamNo ratings yet