You might also like
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Linearna AlgebraDocument3 pagesLinearna AlgebraMarko JedlickaNo ratings yet
- Final Exam Ques SolDocument11 pagesFinal Exam Ques SolLeng RyanNo ratings yet
- 312 HW 111Document9 pages312 HW 111Stefanos van DijkNo ratings yet
- EE C222/ME C237 - Nonlinear phenomena and limit cyclesDocument5 pagesEE C222/ME C237 - Nonlinear phenomena and limit cyclesSBNo ratings yet
- Signal Transmission in Loss-Less Transmission-Lines: 1 A Transmission-Line ModelDocument7 pagesSignal Transmission in Loss-Less Transmission-Lines: 1 A Transmission-Line ModelPratik KamatNo ratings yet
- Chapter02 03 SJDocument5 pagesChapter02 03 SJkaviNo ratings yet
- 2000 Lab 1Document16 pages2000 Lab 1Dyl NicollNo ratings yet
- EE16B HW 2 SolutionsDocument15 pagesEE16B HW 2 SolutionsSummer YangNo ratings yet
- Computer Graphics CheatsheetDocument5 pagesComputer Graphics Cheatsheet강우현No ratings yet
- Manipulator Dynamics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentDocument44 pagesManipulator Dynamics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentWajdi SadiqNo ratings yet
- Lec 07Document4 pagesLec 07eniNo ratings yet
- Linear Algebra: Lecture 5: Linear Transformations and MatricesDocument29 pagesLinear Algebra: Lecture 5: Linear Transformations and MatricesAdrianMirzaNo ratings yet
- First Order Linear Systems With Constant Coefficients: Department of Mathematics IIT Guwahati Shb/SuDocument29 pagesFirst Order Linear Systems With Constant Coefficients: Department of Mathematics IIT Guwahati Shb/SuakshayNo ratings yet
- Flywheels QuestionsDocument3 pagesFlywheels Questionsraghu.entrepreneurNo ratings yet
- CNT Assign 1Document3 pagesCNT Assign 1David Ochieng'No ratings yet
- Core Solution P-6Document10 pagesCore Solution P-6Ahana Singh XI S5No ratings yet
- Cmpe 110 Class NotesDocument69 pagesCmpe 110 Class Notesmohankumar58No ratings yet
- Nevehilo PDFDocument4 pagesNevehilo PDFpolo motoNo ratings yet
- Matrix of A Linear TransformationDocument10 pagesMatrix of A Linear TransformationKimondo KingNo ratings yet
- UDL Example (Singularity)Document4 pagesUDL Example (Singularity)Ahmed MansoorNo ratings yet
- Matrix of A Linear TransformationDocument10 pagesMatrix of A Linear TransformationAkshayNo ratings yet
- Relativistic QMDocument21 pagesRelativistic QMI m mortal Beast ytNo ratings yet
- ∈ C (m ≥ n) - 则存在一个单位列正交矩阵 Q ∈ C (即 Q Q= I) 和一个上三角矩阵 R ∈ C, 使得 A = QrDocument9 pages∈ C (m ≥ n) - 则存在一个单位列正交矩阵 Q ∈ C (即 Q Q= I) 和一个上三角矩阵 R ∈ C, 使得 A = QrMuartz McNo ratings yet
- Assignment 4 - ECE410F Linear Control Systems: Controllability and Stabilization of LTI Systems SolutionsDocument8 pagesAssignment 4 - ECE410F Linear Control Systems: Controllability and Stabilization of LTI Systems SolutionsIsrael JimenezNo ratings yet
- CM Ext, Tot CM CM CM CM CM Ext, Tot Ext, Tot 0 I I CMDocument4 pagesCM Ext, Tot CM CM CM CM CM Ext, Tot Ext, Tot 0 I I CMsudhildeyNo ratings yet
- General Tensors I Transformation of CoordinatesDocument14 pagesGeneral Tensors I Transformation of CoordinatesABCSDFGNo ratings yet
- Lect2 03webDocument15 pagesLect2 03webrathbabuli123No ratings yet
- The Molar Equivalent Equation For Component ADocument4 pagesThe Molar Equivalent Equation For Component Asiriluck_jernNo ratings yet
- EE 201 RLC Transient - 1Document27 pagesEE 201 RLC Transient - 1Joichiro NishiNo ratings yet
- Electric Circuits and Networks Laplace Domain AnalysisDocument4 pagesElectric Circuits and Networks Laplace Domain AnalysisAniruddha RoyNo ratings yet
- Answer Key CAT - IIDocument10 pagesAnswer Key CAT - IIakalan803No ratings yet
- Second Order TransientsDocument6 pagesSecond Order Transientsmusy1233No ratings yet
- Adjacency Matrix NotesDocument3 pagesAdjacency Matrix NotesKavita MNo ratings yet
- R-L-C AC Circuits: P PP RMS RMS PP RMSDocument10 pagesR-L-C AC Circuits: P PP RMS RMS PP RMShiren_powerNo ratings yet
- TFY4305 Solutions Exercise Set 7 2014: Problem 5.2.12Document3 pagesTFY4305 Solutions Exercise Set 7 2014: Problem 5.2.12AaaereNo ratings yet
- Circuit Analysis Using KCL (Node Voltage) MethodDocument3 pagesCircuit Analysis Using KCL (Node Voltage) MethodOshane So-confidential Sawyers100% (1)
- Transport Phenomena 18.4.CDocument3 pagesTransport Phenomena 18.4.CDelyana RatnasariNo ratings yet
- Transient Response Ele 201Document27 pagesTransient Response Ele 201samuelodeyemi3000No ratings yet
- Fault AnalysisDocument84 pagesFault AnalysisDHILDAARNo ratings yet
- Write Up QuadrapoleDocument3 pagesWrite Up Quadrapolewizsid64No ratings yet
- Continuous and Indeterminate Beams - Ali - MammadovDocument19 pagesContinuous and Indeterminate Beams - Ali - MammadovAli MammadovNo ratings yet
- CH 09Document66 pagesCH 09Praveen Kumar Kilaparthi0% (1)
- PSDC 29Document25 pagesPSDC 29Dinesh ShettyNo ratings yet
- ASEN5022 HW04 2004 SolDocument9 pagesASEN5022 HW04 2004 Solrfvz6sNo ratings yet
- CT203: Signals & Systems Tutorial 13 - Laplace Transform and SamplingDocument2 pagesCT203: Signals & Systems Tutorial 13 - Laplace Transform and SamplingKiruba KNo ratings yet
- Shankar Exercises 01.08.01 - 01.08.04Document5 pagesShankar Exercises 01.08.01 - 01.08.04Priyaranjan SahooNo ratings yet
- Chapter 9. Transmission LinesDocument28 pagesChapter 9. Transmission Lines채정우No ratings yet
- Experiment 4: Damped Oscillations and Resonance in RLC CircuitsDocument6 pagesExperiment 4: Damped Oscillations and Resonance in RLC CircuitsjessicaNo ratings yet
- Math TurkDocument7 pagesMath TurkMəhəmməd BayramovNo ratings yet
- Fluids - Lecture 16 Notes: VortexDocument4 pagesFluids - Lecture 16 Notes: VortexSunny DesharNo ratings yet
- Chapter 8Document48 pagesChapter 8hamzaNo ratings yet
- Transient1 RL RCDocument15 pagesTransient1 RL RCKhalidBaderNo ratings yet
- Chapter 9Document28 pagesChapter 9wlsh2001No ratings yet
- Expressions for free response of simple RC, RLC circuitsDocument4 pagesExpressions for free response of simple RC, RLC circuitssrinvas_107796724No ratings yet
- Formula Sheet 2020 ADSEE IIDocument3 pagesFormula Sheet 2020 ADSEE IIwhatdoedirtNo ratings yet
- Tut 13Document3 pagesTut 13NVNo ratings yet
- Goldstein 21 7 12 PDFDocument8 pagesGoldstein 21 7 12 PDFbgiangre8372100% (2)
- Physics 139A Homework 4: 1 Problem 4.9Document9 pagesPhysics 139A Homework 4: 1 Problem 4.9Fahmi IdrisNo ratings yet
- Special Relativity: Key ConceptsDocument24 pagesSpecial Relativity: Key Conceptssaurabh satsangiNo ratings yet
- Lecture 02Document21 pagesLecture 02Stefanos van DijkNo ratings yet
- Tutorial 7Document1 pageTutorial 7Stefanos van DijkNo ratings yet
- Tutorial 2Document1 pageTutorial 2Stefanos van DijkNo ratings yet
- Tutorial2 LSGDocument2 pagesTutorial2 LSGStefanos van DijkNo ratings yet
- Assignment 3 WrittenDocument6 pagesAssignment 3 WrittenStefanos van DijkNo ratings yet
- GrettDocument2 pagesGrettStefanos van DijkNo ratings yet
- Church of The Six: ReligionDocument3 pagesChurch of The Six: ReligionStefanos van DijkNo ratings yet
- ODE - Homework 3: Exercise 1Document7 pagesODE - Homework 3: Exercise 1Stefanos van DijkNo ratings yet
- Topology: Study Group: Schedule 2016-2017Document1 pageTopology: Study Group: Schedule 2016-2017Stefanos van DijkNo ratings yet
- Gods and AgesDocument2 pagesGods and AgesStefanos van Dijk100% (1)
- Orwell's 1984: Controlling Society Through DoublethinkDocument2 pagesOrwell's 1984: Controlling Society Through DoublethinkStefanos van Dijk0% (1)
- EniSpA - The Corporate Strategy of An International Energy Major PDFDocument24 pagesEniSpA - The Corporate Strategy of An International Energy Major PDFAnonymous 9ZMbuR75% (4)
- SK716 Pengintegrasian Mekanisme Nilai Karbon (English)Document13 pagesSK716 Pengintegrasian Mekanisme Nilai Karbon (English)Isti HanifahNo ratings yet
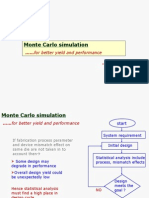
- Cadence Monte Carlo Simulation TutorialDocument51 pagesCadence Monte Carlo Simulation Tutorialkuomatt100% (1)
- 5988-4082EN Designers GuidDocument82 pages5988-4082EN Designers GuidAndreaNo ratings yet
- Ceph Reference ArchitectureDocument12 pagesCeph Reference ArchitectureGermgmaan100% (1)
- GLOBAL GAME AFK IN THE ZOMBIE APOCALYPSE GAME Chapter 201-250Document201 pagesGLOBAL GAME AFK IN THE ZOMBIE APOCALYPSE GAME Chapter 201-250ganesh sarikondaNo ratings yet
- Topic 7.1 - Discrete Energy and Radioactivity Formative Assessment NAMEDocument2 pagesTopic 7.1 - Discrete Energy and Radioactivity Formative Assessment NAMEGajendraNo ratings yet
- Tejas: Practice Sheet JEE PhysicsDocument3 pagesTejas: Practice Sheet JEE PhysicsAshree KesarwaniNo ratings yet
- Legend of Nueva VizcayaDocument10 pagesLegend of Nueva VizcayaAndreanna Maria100% (1)
- Random Variate Generation-1Document21 pagesRandom Variate Generation-1Christian Delas AlasNo ratings yet
- Philips HF C-Arm BrochureDocument2 pagesPhilips HF C-Arm Brochuregarysov50% (2)
- History of FlightDocument10 pagesHistory of FlightHanin AlanaziNo ratings yet
- Rajagiri Public School Unit Test PhysicsDocument3 pagesRajagiri Public School Unit Test PhysicsNITHINKJOSEPHNo ratings yet
- Confined Space Entry: OSHA Standard 1910.146Document38 pagesConfined Space Entry: OSHA Standard 1910.146SKH CultureNo ratings yet
- Am 363 PDFDocument4 pagesAm 363 PDFsunsirNo ratings yet
- Rate AnalysisDocument46 pagesRate AnalysisbulganinganguliNo ratings yet
- Detailed Lesson Plan in General MathematicsDocument6 pagesDetailed Lesson Plan in General MathematicsAira Jane Irarum78% (18)
- Comparative Study of Organic Solvents For Extraction of Copper From Ammoniacal Carbonate Solution Hu2010Document6 pagesComparative Study of Organic Solvents For Extraction of Copper From Ammoniacal Carbonate Solution Hu2010mtanaydinNo ratings yet
- Essotherm 500 PDFDocument8 pagesEssotherm 500 PDFdonyaNo ratings yet
- Memorial Garden Policies and Guidelines St. Mark's Episcopal Church, Raleigh, North CarolinaDocument7 pagesMemorial Garden Policies and Guidelines St. Mark's Episcopal Church, Raleigh, North Carolinaestela maria dulaganNo ratings yet
- Design Calculations of Thrust Blocks at Lower Indira: L&T Construction Water & Effluent Treatment ICDocument3 pagesDesign Calculations of Thrust Blocks at Lower Indira: L&T Construction Water & Effluent Treatment IClagnajit dasNo ratings yet
- List of Students Allotted in Open Elective Subjects (B. Tech and M. Tech (Dual Degree) Integrated MSc. - 4th Semester - Regular - 2018 - 19) - 2 PDFDocument26 pagesList of Students Allotted in Open Elective Subjects (B. Tech and M. Tech (Dual Degree) Integrated MSc. - 4th Semester - Regular - 2018 - 19) - 2 PDFArpan JaiswalNo ratings yet
- A Grammar of Anong Language Death Under Intense ContactDocument409 pagesA Grammar of Anong Language Death Under Intense ContacthaoyichuanNo ratings yet
- Osha Top 25 Physical HazardsDocument100 pagesOsha Top 25 Physical HazardsHasan Shakeel100% (2)
- Yanmar Mechnical PumpDocument16 pagesYanmar Mechnical Pump송성훈100% (9)
- A History of The Jewish People in The Time of Jesus Christ (1891) Index Schürer, Emil, 1844-1910Document132 pagesA History of The Jewish People in The Time of Jesus Christ (1891) Index Schürer, Emil, 1844-1910David Bailey100% (2)
- B Ed 3 Sem Physics Teaching Group C Science 1 Paper 1 Summer 2018Document3 pagesB Ed 3 Sem Physics Teaching Group C Science 1 Paper 1 Summer 2018Rrr KkkNo ratings yet
- The Image of The CityDocument17 pagesThe Image of The CityMay Rose ParagasNo ratings yet
- Aquafina Marketing Strategy AnalysisDocument31 pagesAquafina Marketing Strategy AnalysisChintan Leo Patel0% (1)
- Sample Article Used by MeDocument14 pagesSample Article Used by MeMagnum OpusNo ratings yet