You might also like
- Pages From Fuji MB2 BL2000-3Document44 pagesPages From Fuji MB2 BL2000-3Raja DuraiNo ratings yet
- Yaskawa V 1000 Model Elevator Drive Program SettingDocument1 pageYaskawa V 1000 Model Elevator Drive Program SettingMohammed SajidNo ratings yet
- Santa Parameters VariadorDocument2 pagesSanta Parameters VariadorFernando MedinaNo ratings yet
- LSIS VFD Quick Start Guide: C100, S100, H100, and Is7Document3 pagesLSIS VFD Quick Start Guide: C100, S100, H100, and Is7JoshNo ratings yet
- Apolo Textil Demo EthernetIP ParametersDocument2 pagesApolo Textil Demo EthernetIP ParametersAbraham LaraNo ratings yet
- s100 - VFD - Elevator v1.2 (En)Document2 pagess100 - VFD - Elevator v1.2 (En)Mohamed SaadNo ratings yet
- Wire Ferules Description Fuji Fuji Name Digital Input Analog InputDocument1 pageWire Ferules Description Fuji Fuji Name Digital Input Analog InputMohammed SajidNo ratings yet
- Parameters ListDocument1 pageParameters Listthanhluc2011No ratings yet
- Modified Parameter Settings Report (Program) : Drive Type / Model: Software: 1025 V1000 CIMR-V 2 0001Document1 pageModified Parameter Settings Report (Program) : Drive Type / Model: Software: 1025 V1000 CIMR-V 2 0001Pablo Hidalgo ValenzuelaNo ratings yet
- VSX Intro ProgramDocument44 pagesVSX Intro Programeami.contactoNo ratings yet
- DiffDocument1 pageDiffMaria TzagarakiNo ratings yet
- HP Drive (FAR)Document2 pagesHP Drive (FAR)kaami.am68No ratings yet
- Tham So Bien Tan FUJI HISADocument2 pagesTham So Bien Tan FUJI HISAminhnoNo ratings yet
- 78 Fuji SanyoDocument4 pages78 Fuji SanyoBAAAK100% (2)
- Kone V3F10 Variador ParametrosDocument9 pagesKone V3F10 Variador ParametrosRaquel LinsNo ratings yet
- Parameter Inverter Varispeed-606PC3 Profile Sanding LasiiDocument4 pagesParameter Inverter Varispeed-606PC3 Profile Sanding LasiiArief RakhmadNo ratings yet
- YDWI Project ParametersDocument2 pagesYDWI Project ParametersLuis PerezNo ratings yet
- PCIM Asia 2015Document40 pagesPCIM Asia 2015elsmanNo ratings yet
- Power Electronics PSPICE Lab User Manual: An Iso 9001:2008 Certified OrganizationDocument19 pagesPower Electronics PSPICE Lab User Manual: An Iso 9001:2008 Certified Organizationameiyappan5697No ratings yet
- Modified ParametersDocument2 pagesModified ParametersRoberto CordovaNo ratings yet
- Meter Configuration Report For LJ-1412A586-05Document33 pagesMeter Configuration Report For LJ-1412A586-05Snaider SilveraNo ratings yet
- JS DyDocument13 pagesJS DyNisar AhmedNo ratings yet
- Output Voltage PID F7 Drive Software Technical ManualDocument8 pagesOutput Voltage PID F7 Drive Software Technical ManualphysicudoNo ratings yet
- LS 820Document2 pagesLS 8208819133No ratings yet
- HuanyangVFD Mach3SettingsDocument3 pagesHuanyangVFD Mach3SettingsEdy PutrantoNo ratings yet
- Lcda 608s Digital DC Servo ManualDocument22 pagesLcda 608s Digital DC Servo ManualHoàng NguyễnNo ratings yet
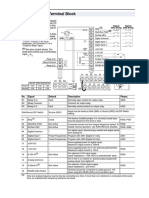
- Control Terminal Block: Important: The Drive Is ShippedDocument1 pageControl Terminal Block: Important: The Drive Is ShippedAvinash GokhaleNo ratings yet
- DELIXI Soalr Pump Inverter Catalogue - 2020Document4 pagesDELIXI Soalr Pump Inverter Catalogue - 2020Fraz AhmadNo ratings yet
- TBR at Aw03-72leDocument19 pagesTBR at Aw03-72lehayyeuanh_duchimotla83% (18)
- GD20-en V1.3 PDFDocument122 pagesGD20-en V1.3 PDFjhonnyNo ratings yet
- Facon FB Series PLC Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualDocument2 pagesFacon FB Series PLC Delta A. Hmi Factory Settings: Appendix B Communication - Scredit Software User ManualryoNo ratings yet
- Lect 4 PDFDocument14 pagesLect 4 PDFSaif AlabdullahNo ratings yet
- Páginas Desde Programacion-2Document26 pagesPáginas Desde Programacion-2Franz Gómez VásquezNo ratings yet
- Rp130X Series: Low Noise 150ma Ldo RegulatorDocument33 pagesRp130X Series: Low Noise 150ma Ldo RegulatorСергей БрегедаNo ratings yet
- Eric 9001 EngDocument2 pagesEric 9001 EngHenri KleineNo ratings yet
- EN Quick Instruction - LS G100 v1.01 (08.2023)Document2 pagesEN Quick Instruction - LS G100 v1.01 (08.2023)Sanjt BhoiNo ratings yet
- 1500 HZ High Frequency F7 Drive Software Technical ManualDocument7 pages1500 HZ High Frequency F7 Drive Software Technical ManualhrbbNo ratings yet
- Setting BRAKE Wiring Digital Output CN1Document5 pagesSetting BRAKE Wiring Digital Output CN1Imam SyaefudinNo ratings yet
- Controlador de Factor de PotenciaDocument18 pagesControlador de Factor de PotenciaMauricio GuerreroNo ratings yet
- ECE462 Motor Lab Experiment3Document14 pagesECE462 Motor Lab Experiment3eng_abdelghany1979No ratings yet
- Invt gd100 User ManualDocument111 pagesInvt gd100 User ManualRaison Automation0% (2)
- SJ100 QRG NB5821XDDocument24 pagesSJ100 QRG NB5821XDFiq GanuNo ratings yet
- 06 PWM ConvertersDocument59 pages06 PWM ConvertersriajulNo ratings yet
- 03-Character LCD DatasheetDocument25 pages03-Character LCD DatasheetmohamedNo ratings yet
- FR150A Frequency Inverter Catalog EN 2021 V2.0Document8 pagesFR150A Frequency Inverter Catalog EN 2021 V2.0wow greatNo ratings yet
- TM G5SW 045Document13 pagesTM G5SW 045HumbertoNo ratings yet
- MITSUBISHI QJ71 Driver For Q00/Q01 CPU Port: HMI SettingDocument3 pagesMITSUBISHI QJ71 Driver For Q00/Q01 CPU Port: HMI SettingHamid KharazmiNo ratings yet
- PV PanelDocument17 pagesPV PanelMuhammad RiazNo ratings yet
- DS1103 - Adaptive Control Encoders 10052016Document41 pagesDS1103 - Adaptive Control Encoders 10052016hieuhuechchNo ratings yet
- Simple CC/CV Charger Using TPS54331: S.NikhilDocument6 pagesSimple CC/CV Charger Using TPS54331: S.NikhilDarshan KannurNo ratings yet
- TU550A Auto Transfer Controller Operation Manual-1Document25 pagesTU550A Auto Transfer Controller Operation Manual-1gonshui gonshuiNo ratings yet
- 8T Yaskawa BRS Saved 070722 ParametersDocument15 pages8T Yaskawa BRS Saved 070722 ParametersVegard SømliøyNo ratings yet
- Parker Denison Catalogue Medium Duty Vane Motor M4DDocument4 pagesParker Denison Catalogue Medium Duty Vane Motor M4DDanielEscobarMontecinosNo ratings yet
- FC102 Basic 2Document1 pageFC102 Basic 2silverblade123192No ratings yet
- VfdelwDocument11 pagesVfdelwHalil YakışanNo ratings yet
- Expt 03Document3 pagesExpt 03jk arnabNo ratings yet
- Atoll 3.4.1 General Features Radio 5G NRDocument114 pagesAtoll 3.4.1 General Features Radio 5G NRmdanishaminNo ratings yet
- Celestron GT Handcontrol DesignDocument2 pagesCelestron GT Handcontrol Designngt881No ratings yet
- FLIR Blackfly USB3 Startup GuideDocument2 pagesFLIR Blackfly USB3 Startup GuidePavan Kumar BittuNo ratings yet
- Manual Usuario - Software - SDP2000Document10 pagesManual Usuario - Software - SDP2000Jonathan MorenoNo ratings yet
- How To Compile Porting Layer C Code For Android ClientDocument2 pagesHow To Compile Porting Layer C Code For Android ClientAmruth ANo ratings yet
- CySA+ Study Guide PublicDocument61 pagesCySA+ Study Guide Publicmailbox4vivekNo ratings yet
- DX-Altus Training Course (TTR-00003-130)Document202 pagesDX-Altus Training Course (TTR-00003-130)Marn DNo ratings yet
- Python (Programming Language) : Python Is An Interpreted High-Level General-PurposeDocument34 pagesPython (Programming Language) : Python Is An Interpreted High-Level General-PurposeNijobNo ratings yet
- Software Reviews: Page 1 of 2Document2 pagesSoftware Reviews: Page 1 of 2saurabhNo ratings yet
- 07 VLAN Configuration (PAGE1 21)Document61 pages07 VLAN Configuration (PAGE1 21)XanNo ratings yet
- EMC VNX Parts Location GuideDocument44 pagesEMC VNX Parts Location GuideAcalPD100% (1)
- Exam 1 Study Guide - CEN6016Document2 pagesExam 1 Study Guide - CEN6016Salman KhanNo ratings yet
- Omicron ProtectionDocument176 pagesOmicron ProtectionWrya SaeedNo ratings yet
- Error Codes For Panasonic Air ConditionersDocument5 pagesError Codes For Panasonic Air ConditionersPheak TraNo ratings yet
- Pulse Position Modulation and DemodulationDocument3 pagesPulse Position Modulation and Demodulationpravsvizag100% (1)
- 2 Car Sensors V1-TemperatureDocument35 pages2 Car Sensors V1-TemperatureWNo ratings yet
- BX10/BX10 MB: Weighing Terminals Technical ManualDocument60 pagesBX10/BX10 MB: Weighing Terminals Technical Manualfelipezambrano50% (2)
- Plbconverter: Convert A PLB To Different Document FormatsDocument10 pagesPlbconverter: Convert A PLB To Different Document Formatsec05226No ratings yet
- 2012 iOS DEVELOPER Interview QuestionsDocument6 pages2012 iOS DEVELOPER Interview QuestionsAleks KoporgeNo ratings yet
- Automatic Mains / Generator Changeover Panel With Star Delta (Open Transition) StarterDocument2 pagesAutomatic Mains / Generator Changeover Panel With Star Delta (Open Transition) StarterRAKESH REDDYNo ratings yet
- Inverter Systems: For Gen 3 Drives of HEIDENHAIN ControlsDocument59 pagesInverter Systems: For Gen 3 Drives of HEIDENHAIN ControlsSir StigaNo ratings yet
- Flash Programming: Script AssistDocument31 pagesFlash Programming: Script AssistBintang TatiusNo ratings yet
- EXAMTOPICS Quiz GCPDocument43 pagesEXAMTOPICS Quiz GCPRathika GowriNo ratings yet
- Blue Ray DiskDocument6 pagesBlue Ray DiskManpreet SachdevaNo ratings yet
- Memory Forensic in Incident ResponseDocument74 pagesMemory Forensic in Incident ResponseSunidhi Jain100% (1)
- Panasonic Minas A6 Technical ReferenceDocument312 pagesPanasonic Minas A6 Technical ReferenceVahe YeghyanNo ratings yet
- Ds kd8002 VM PDFDocument3 pagesDs kd8002 VM PDFCarlos RamosNo ratings yet
- Modulex3 Bruchure GBDocument12 pagesModulex3 Bruchure GBmrinal570No ratings yet
- SAP.C - HANATEC - 17.v2021-04-28.q84: Leave A ReplyDocument22 pagesSAP.C - HANATEC - 17.v2021-04-28.q84: Leave A ReplyAmrita NandaNo ratings yet