You might also like
- Ceiling Fan Laboratory Guidance ManualDocument35 pagesCeiling Fan Laboratory Guidance ManualSsdssddNo ratings yet
- 2018 Google Dorks MasterDocument84 pages2018 Google Dorks MasterhackedNo ratings yet
- PIC Projects and Applications using C: A Project-based ApproachFrom EverandPIC Projects and Applications using C: A Project-based ApproachRating: 4 out of 5 stars4/5 (2)
- Cisco UCS Adapter TroubleshootingDocument90 pagesCisco UCS Adapter TroubleshootingShahulNo ratings yet
- Performance Report SummaryDocument13 pagesPerformance Report SummaryHariprasad Reddy GNo ratings yet
- ARM Microcontrollers Programming for Embedded SystemsFrom EverandARM Microcontrollers Programming for Embedded SystemsRating: 5 out of 5 stars5/5 (1)
- IP 20C Datasheet PDFDocument44 pagesIP 20C Datasheet PDFМахендра СингхNo ratings yet
- Listening Practice Set #1 - PembekalanDocument4 pagesListening Practice Set #1 - PembekalanGina FadliaNo ratings yet
- Programming PIC16F877A Using CCS C Compiler and US-BurnDocument45 pagesProgramming PIC16F877A Using CCS C Compiler and US-Burnapi-3725904100% (17)
- PMP - Case Study 6Document9 pagesPMP - Case Study 6Ciise Cali HaybeNo ratings yet
- ML350 Gen10 Platform Technical Specification 1.1Document12 pagesML350 Gen10 Platform Technical Specification 1.1Roberto Carlos PintoNo ratings yet
- Arducam Usb3 Camera Shield: User GuideDocument10 pagesArducam Usb3 Camera Shield: User Guiderajesh gargNo ratings yet
- AP8048A Datasheet: Audio Application ProcessorDocument12 pagesAP8048A Datasheet: Audio Application ProcessorEduardoGaleanoNo ratings yet
- Dspic33F/Pic24H Flash Programming SpecificationDocument84 pagesDspic33F/Pic24H Flash Programming SpecificationSobhi MahNo ratings yet
- ProCash 2054xe USB Service Manual - May2018Document830 pagesProCash 2054xe USB Service Manual - May2018Jordan ParsonsNo ratings yet
- MicroPIC18F Lite User ManualDocument19 pagesMicroPIC18F Lite User ManualElena Gilbert100% (1)
- R.Link Video-Inserter Ci-Rl2-Mmi3G-Q3 Ci-Rl2-Mmi3G-GwDocument21 pagesR.Link Video-Inserter Ci-Rl2-Mmi3G-Q3 Ci-Rl2-Mmi3G-GwHoàng Văn NghĩaNo ratings yet
- Project Overview Of: Zigbee Based Mapping and Position TrackingDocument31 pagesProject Overview Of: Zigbee Based Mapping and Position TrackingNaga NikhilNo ratings yet
- 11simrcDocument77 pages11simrcAVNo ratings yet
- PCR2-TWN4: RFID Reader For PORTDocument15 pagesPCR2-TWN4: RFID Reader For PORTMohd Abu AjajNo ratings yet
- AMT630A Video Display Controller Specification (V1.1Document9 pagesAMT630A Video Display Controller Specification (V1.1HAROL ALEXIS VALENCIA OSPINANo ratings yet
- DCH 5100PDocument21 pagesDCH 5100PSergio BorrasNo ratings yet
- PIC18F46J50 ErrataDocument12 pagesPIC18F46J50 Erratafrank_grimesNo ratings yet
- CAMERADEBUGDOCDocument11 pagesCAMERADEBUGDOCRohit YadavNo ratings yet
- SBC65EC - Ethernet Enabled Single Board ComputerDocument11 pagesSBC65EC - Ethernet Enabled Single Board ComputerbondNo ratings yet
- SPIDriver User Guide: Setup, APIs & ExamplesDocument22 pagesSPIDriver User Guide: Setup, APIs & ExamplesluizmataNo ratings yet
- tc7200 Generic Sip Release Note stcf.01.23Document27 pagestc7200 Generic Sip Release Note stcf.01.23Google PayNo ratings yet
- Mavric-Iib: Mega AVR Integrated Controller II Revision B Technical ManualDocument17 pagesMavric-Iib: Mega AVR Integrated Controller II Revision B Technical ManualGeorge MecseryNo ratings yet
- EEPROMSDocument18 pagesEEPROMSalejandrodmsosaNo ratings yet
- PIC18F2455/2550/4455/4550: PIC18F2455/2550/4455/4550 Family Silicon Errata and Data Sheet ClarificationDocument26 pagesPIC18F2455/2550/4455/4550: PIC18F2455/2550/4455/4550 Family Silicon Errata and Data Sheet ClarificationqwertyNo ratings yet
- Atecc608B: Cryptoauthentication Device Summary Data SheetDocument30 pagesAtecc608B: Cryptoauthentication Device Summary Data Sheetgino ginelliNo ratings yet
- I8093w API Reference Manual v1.0.1Document56 pagesI8093w API Reference Manual v1.0.1Pedro BortotNo ratings yet
- LVP605 Series User's ManualDocument44 pagesLVP605 Series User's Manualb226g5jbgvNo ratings yet
- Pic Mini WebDocument15 pagesPic Mini WebSizwe Martin ZithaNo ratings yet
- Blackfin A V EZ Extender Manual Rev. 2.0Document60 pagesBlackfin A V EZ Extender Manual Rev. 2.0SilvianNo ratings yet
- Centero VN220 HW Integration Application NoteDocument46 pagesCentero VN220 HW Integration Application NoteraytangclNo ratings yet
- Communication Solution DVD 2020-12-1 UpdateDocument3 pagesCommunication Solution DVD 2020-12-1 UpdateMatute OmarNo ratings yet
- 180829_Vinfast_Robot_Application_Handling_v1_1Document41 pages180829_Vinfast_Robot_Application_Handling_v1_1kazimierz.bikNo ratings yet
- 24.1.6 Lab - Implement IP SLA - ILMDocument37 pages24.1.6 Lab - Implement IP SLA - ILMTRYST CHAMANo ratings yet
- iCP05v1 2 PDFDocument9 pagesiCP05v1 2 PDFphotosynergyNo ratings yet
- ArduCAM USB Camera User GuideDocument10 pagesArduCAM USB Camera User GuideAbu SofyanNo ratings yet
- Ni 9208Document24 pagesNi 9208Ricardo MayoralNo ratings yet
- User'S Guide: LSP 1.20 Davinci Linux V4L2 Display DriverDocument32 pagesUser'S Guide: LSP 1.20 Davinci Linux V4L2 Display DriverNgọc NinhNo ratings yet
- ENCOR SA Scenario 2 - ILMDocument33 pagesENCOR SA Scenario 2 - ILMBouiltonNo ratings yet
- UserManual microADSB WiFi v2 r2 PDFDocument26 pagesUserManual microADSB WiFi v2 r2 PDFLatisha JeffersonNo ratings yet
- R.Link Video-Inserter Rl4-NacDocument25 pagesR.Link Video-Inserter Rl4-NacjuankaldeNo ratings yet
- Manual Rm5Document34 pagesManual Rm5Juan Camilo CadavidNo ratings yet
- Id Cpr.M02 / Id Cpr.02 Firmware Update: Application-NoteDocument20 pagesId Cpr.M02 / Id Cpr.02 Firmware Update: Application-NoteMexc6for1No ratings yet
- C2-Ccc C2-Cic Compatible With BMW Professional Navigation Systems With Idrive and 6.5"/8.8" MonitorDocument15 pagesC2-Ccc C2-Cic Compatible With BMW Professional Navigation Systems With Idrive and 6.5"/8.8" MonitorAndrei ANo ratings yet
- Manual Pro CeraOsDocument41 pagesManual Pro CeraOsEduwin MendezNo ratings yet
- nf9uDocument52 pagesnf9umuni.callao24No ratings yet
- CollabCert Racks SpecsDocument10 pagesCollabCert Racks SpecsSheik ShareefNo ratings yet
- Revised Tender For Procurement of CC TV InstallationDocument20 pagesRevised Tender For Procurement of CC TV InstallationAbdul NafeyNo ratings yet
- Applic Info PIC MicrocontrollerDocument12 pagesApplic Info PIC MicrocontrollerAbhinav Reddy Kallam100% (6)
- Cgnat On VSM in 5.1.1Document24 pagesCgnat On VSM in 5.1.1Marco López ZeledónNo ratings yet
- Aspire 3810t 3810tzDocument100 pagesAspire 3810t 3810tzmiecho1985No ratings yet
- Avr Usb Isp MkiiDocument17 pagesAvr Usb Isp Mkiigunawansigi36No ratings yet
- Network Management Card 2 For GUTOR XXW/SDC: What's in This DocumentDocument4 pagesNetwork Management Card 2 For GUTOR XXW/SDC: What's in This DocumentIrfan IkinNo ratings yet
- Manual Escalador LVP 615Document98 pagesManual Escalador LVP 615julianaNo ratings yet
- FD70CMT MDocument15 pagesFD70CMT Mjosue jetavionicsNo ratings yet
- OWG003411 SCCP Signaling Analysis and Process ISSUE1.0Document38 pagesOWG003411 SCCP Signaling Analysis and Process ISSUE1.0Fouad BoutatNo ratings yet
- Ibapda-S7-Tcpip: ManualDocument28 pagesIbapda-S7-Tcpip: Manualoziel samaniegoNo ratings yet
- AxTraxNG V27.7.1.19 Release Notes V2022 - 05 - 16Document7 pagesAxTraxNG V27.7.1.19 Release Notes V2022 - 05 - 16Kim Chuan LimNo ratings yet
- Programming Arduino Projects with the PIC Microcontroller: A Line-by-Line Code Analysis and Complete Reference Guide for Embedded Programming in CFrom EverandProgramming Arduino Projects with the PIC Microcontroller: A Line-by-Line Code Analysis and Complete Reference Guide for Embedded Programming in CNo ratings yet
- @airbus: Airbus S.A.SDocument627 pages@airbus: Airbus S.A.Sjoker hotNo ratings yet
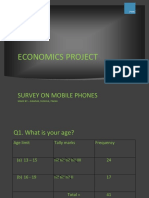
- Economics Project: Survey On Mobile PhonesDocument16 pagesEconomics Project: Survey On Mobile PhonesmanikNo ratings yet
- Resume Rohit JainDocument2 pagesResume Rohit JainJigar JainNo ratings yet
- .625 DIA & HEX: Outline/Installation Drawing, MODEL 3100D24Document2 pages.625 DIA & HEX: Outline/Installation Drawing, MODEL 3100D24info5280No ratings yet
- 05 38 Counts Exercise & TextDocument5 pages05 38 Counts Exercise & TextANUP MUNDENo ratings yet
- Grade 8 Term 1 Pretechnical Schemes MentorDocument9 pagesGrade 8 Term 1 Pretechnical Schemes MentorBENARD LUKIBIANo ratings yet
- Classifying Websites as Static or DynamicDocument2 pagesClassifying Websites as Static or DynamicStephanie AquinoNo ratings yet
- Collection of Dried Cocoa BeansDocument2 pagesCollection of Dried Cocoa BeansRoushanNo ratings yet
- Application Controls: Batch Processing Application AuditDocument34 pagesApplication Controls: Batch Processing Application AuditYanYan YumulNo ratings yet
- .Uksitesdefaultfiles2023 10Pages20from20LOCOMOTION20report20part201 PDFDocument109 pages.Uksitesdefaultfiles2023 10Pages20from20LOCOMOTION20report20part201 PDFdfjpennington1No ratings yet
- Contact Google Workspace SupportDocument2 pagesContact Google Workspace Supportmhpkew6222No ratings yet
- Cessna 208 (Caravan) : Standard De-Ice BootsDocument174 pagesCessna 208 (Caravan) : Standard De-Ice BootsNaguibNo ratings yet
- ME HoneywellVideoSystems PDFDocument157 pagesME HoneywellVideoSystems PDFSteven HungNo ratings yet
- Safety Logic For Machines and Systems - Easysafety ES4P - Safety Relay ESR5Document16 pagesSafety Logic For Machines and Systems - Easysafety ES4P - Safety Relay ESR5geocaustasNo ratings yet
- Inventaris Barang LaboratoriumDocument52 pagesInventaris Barang Laboratoriumlaboratorium rsparagonNo ratings yet
- Partes Lexmark MX611Document29 pagesPartes Lexmark MX611مينورمويسيسأرياغاNo ratings yet
- Avaya IP Office ContactCenter BrochureDocument87 pagesAvaya IP Office ContactCenter BrochureVicky NicNo ratings yet
- Autorefractor RT 8000 PDFDocument28 pagesAutorefractor RT 8000 PDFSawit RuntuhNo ratings yet
- ME453 CAD: Design ProjectDocument33 pagesME453 CAD: Design ProjectKaori MiyazonoNo ratings yet
- Pentode JJ Ef806sDocument2 pagesPentode JJ Ef806sCristianNo ratings yet
- Automatic smoke detector and fire alarm systemDocument7 pagesAutomatic smoke detector and fire alarm systemSwastik JainNo ratings yet
- Star Computer Systems Limited: Internship Report ONDocument46 pagesStar Computer Systems Limited: Internship Report ONMilion NugusieNo ratings yet
- OruxMaps Manual v6.0Document68 pagesOruxMaps Manual v6.0juanete29No ratings yet
- NPTEL Online Certification Courses Programming in Java Assignment 5 MCQ QuestionsDocument5 pagesNPTEL Online Certification Courses Programming in Java Assignment 5 MCQ QuestionsAbhinav ReddyNo ratings yet
- IOT Based Accident Prevention and Detection System Using GSM-GPS, Eye Blink, and Alcohol SensorDocument8 pagesIOT Based Accident Prevention and Detection System Using GSM-GPS, Eye Blink, and Alcohol SensorIJRASETPublicationsNo ratings yet