You might also like
- L11a Uncertainty171105Document25 pagesL11a Uncertainty171105Queen Emefa OlivesNo ratings yet
- UncertaintyDocument27 pagesUncertaintyVARA SAMUEL SUDHEER 17BCE0628No ratings yet
- Lecture Quantifying UncertaintyDocument40 pagesLecture Quantifying UncertaintySACHIN BHAGATNo ratings yet
- Uncertainty InferenceDocument38 pagesUncertainty Inferenceshraddhamore13.smNo ratings yet
- 7 UncertaintyDocument13 pages7 UncertaintytanvirNo ratings yet
- AI UncertaintyDocument38 pagesAI UncertaintySirishaNo ratings yet
- m13 UncertaintyDocument24 pagesm13 UncertaintyKalpana MrcetNo ratings yet
- UncertaintyDocument25 pagesUncertaintyNguyễn Thị Mỹ HânNo ratings yet
- An Introduction To Artificial Intelligence: Chapter 13 &14.1-14.2: Uncertainty & Bayesian NetworksDocument31 pagesAn Introduction To Artificial Intelligence: Chapter 13 &14.1-14.2: Uncertainty & Bayesian NetworksShovon RoyNo ratings yet
- Uncertainty: CSE-345: Artificial IntelligenceDocument30 pagesUncertainty: CSE-345: Artificial IntelligenceFariha OisyNo ratings yet
- FALLSEM2023-24 CSE3013 ETH VL2023240103712 2023-08-01 Reference-Material-IDocument34 pagesFALLSEM2023-24 CSE3013 ETH VL2023240103712 2023-08-01 Reference-Material-Isiddharth guptaNo ratings yet
- Chapter13 PDFDocument34 pagesChapter13 PDFAnastasia BulavinovNo ratings yet
- Introduction To Probability Theory: A Short Course On Graphical ModelsDocument30 pagesIntroduction To Probability Theory: A Short Course On Graphical ModelszahirkhokanNo ratings yet
- CS464 Review of Probability: (Based On The Slides Provided by Öznur Taştan and Mehmet Koyutürk)Document55 pagesCS464 Review of Probability: (Based On The Slides Provided by Öznur Taştan and Mehmet Koyutürk)Mathias BuenoNo ratings yet
- 02 ProbIntro 2020 AnnotatedDocument44 pages02 ProbIntro 2020 AnnotatedEureka oneNo ratings yet
- Artificial Intelligence: Adina Magda FloreaDocument36 pagesArtificial Intelligence: Adina Magda FloreaPablo Lorenzo Muños SanchesNo ratings yet
- Module No. 05 Uncertain Knowledge and ReasoningDocument14 pagesModule No. 05 Uncertain Knowledge and ReasoningShaza KhotNo ratings yet
- COMP6275 - AI Week 5: Quantifying UncertaintyDocument38 pagesCOMP6275 - AI Week 5: Quantifying UncertaintyGuntur WibisonoNo ratings yet
- Statistics 512 Notes I D. SmallDocument8 pagesStatistics 512 Notes I D. SmallSandeep SinghNo ratings yet
- 04 - Probability in AIDocument169 pages04 - Probability in AIOmar KhashanNo ratings yet
- Lecture_01_ProbabilityDocument51 pagesLecture_01_ProbabilitydantieNo ratings yet
- Stochastic Calculus Notes, Lecture 1Document21 pagesStochastic Calculus Notes, Lecture 1TarunNo ratings yet
- Reasoning and Fuzzy LogicDocument51 pagesReasoning and Fuzzy LogicRammah YusufNo ratings yet
- Chapter13 UncertaintyDocument49 pagesChapter13 Uncertaintynaseem hanzilaNo ratings yet
- Minggu 14 - Probabilistic Reasoning SystemDocument41 pagesMinggu 14 - Probabilistic Reasoning Systemarbong007No ratings yet
- Probability Review GuideDocument33 pagesProbability Review GuideAfsana RahmanNo ratings yet
- A Case Study of Bank Queueing Model: Kasturi Nirmala, DR - Shahnaz BathulDocument8 pagesA Case Study of Bank Queueing Model: Kasturi Nirmala, DR - Shahnaz BathulIJERDNo ratings yet
- Business Econometrics Using SAS Tools (BEST) : Class IV - Probability RefresherDocument31 pagesBusiness Econometrics Using SAS Tools (BEST) : Class IV - Probability RefresherRohit RajNo ratings yet
- Module 2Document17 pagesModule 2surajsh0115No ratings yet
- RD05 StatisticsDocument7 pagesRD05 StatisticsأحمدآلزهوNo ratings yet
- PPT05-Quantifying UncertaintyDocument39 pagesPPT05-Quantifying UncertaintyVeri VeriNo ratings yet
- Math Supplement PDFDocument17 pagesMath Supplement PDFRajat GargNo ratings yet
- Probability DistributionsDocument14 pagesProbability DistributionsNazmul HudaNo ratings yet
- Study Unit 2.1 Basic ProbabilityDocument37 pagesStudy Unit 2.1 Basic ProbabilitybronwyncloeteNo ratings yet
- Bayesian Reasoning: An Introduction to Bayesian NetworksDocument45 pagesBayesian Reasoning: An Introduction to Bayesian Networkslouis benNo ratings yet
- Slides-SkskDocument151 pagesSlides-SkskGaurav Kumar Gupta100% (1)
- Slides 11 09 PDFDocument105 pagesSlides 11 09 PDFGaurav Kumar GuptaNo ratings yet
- !!!!!!!!!! ModelingUncertaintyDocument85 pages!!!!!!!!!! ModelingUncertaintyMohamed Hechmi JERIDINo ratings yet
- Lec 6 Probability UpdatedDocument38 pagesLec 6 Probability UpdatedMira NabilNo ratings yet
- Statistical Methods in Quality ManagementDocument71 pagesStatistical Methods in Quality ManagementKurtNo ratings yet
- Artificial Intelligence Planning and Machine LearningDocument14 pagesArtificial Intelligence Planning and Machine LearningjegannancyNo ratings yet
- C-1-ReasoningDocument19 pagesC-1-Reasoningshreya saxenaNo ratings yet
- DeepayanSarkar BayesianDocument152 pagesDeepayanSarkar BayesianPhat NguyenNo ratings yet
- STM Summary NotesDocument18 pagesSTM Summary NotesisoaidNo ratings yet
- ML PhysicsDocument24 pagesML PhysicsQuantumChromistNo ratings yet
- Lecture 10: November 2, 2021: 1 Basics of Probability: The Finite CaseDocument3 pagesLecture 10: November 2, 2021: 1 Basics of Probability: The Finite CasePushkaraj PanseNo ratings yet
- Lecture 5: Statistical Independence, Discrete Random VariablesDocument4 pagesLecture 5: Statistical Independence, Discrete Random VariablesDesmond SeahNo ratings yet
- S1) Basic Probability ReviewDocument71 pagesS1) Basic Probability ReviewMAYANK HARSANINo ratings yet
- IAI: Treatment of UncertaintyDocument20 pagesIAI: Treatment of UncertaintySai Venkat GudlaNo ratings yet
- Probability: Learning ObjectivesDocument31 pagesProbability: Learning ObjectivesShiinNo ratings yet
- STAT 433 Course NoteDocument11 pagesSTAT 433 Course NoteTuan HiepNo ratings yet
- Probability Theory and Random ProcessesDocument47 pagesProbability Theory and Random ProcessesAnusha BalusuNo ratings yet
- Statistical Methods in Quality ManagementDocument71 pagesStatistical Methods in Quality ManagementKurtNo ratings yet
- Stastical HydrologyDocument11 pagesStastical HydrologyovishalzNo ratings yet
- Serie N4 SolutionDocument9 pagesSerie N4 SolutionMoh MohNo ratings yet
- Bayes 2Document48 pagesBayes 2N MaheshNo ratings yet
- MA-2203: Introduction To Probability and Statistics: Lecture SlidesDocument64 pagesMA-2203: Introduction To Probability and Statistics: Lecture SlidesGaurav Kumar GuptaNo ratings yet
- MA-2203 Introduction to Probability and Statistics Lecture SlidesDocument81 pagesMA-2203 Introduction to Probability and Statistics Lecture SlidesGaurav Kumar GuptaNo ratings yet
- Sump Pumps: Single Channel Soft Solids Handling Sewage PumpDocument2 pagesSump Pumps: Single Channel Soft Solids Handling Sewage PumpMohammad ZeeshanNo ratings yet
- SummaryDocument3 pagesSummaryОля ВласійчукNo ratings yet
- 1 s2.0 S1877042816311582 MainDocument8 pages1 s2.0 S1877042816311582 MainAilyn rodilNo ratings yet
- AlumaCore OPGWDocument1 pageAlumaCore OPGWlepouletNo ratings yet
- Travelstar 25GS, 18GT, & 12GN: Quick Installation GuideDocument2 pagesTravelstar 25GS, 18GT, & 12GN: Quick Installation Guidebim2009No ratings yet
- Life Lines RequirementsDocument2 pagesLife Lines RequirementsAnsarMahmoodNo ratings yet
- CHAPTER 9 Microsoft Excel 2016 Back ExerciseDocument3 pagesCHAPTER 9 Microsoft Excel 2016 Back ExerciseGargi SinghNo ratings yet
- Class Test Dec 10Document6 pagesClass Test Dec 10trudes100No ratings yet
- Tohatsu 2 Stroke Service Manual 1992 2000Document329 pagesTohatsu 2 Stroke Service Manual 1992 2000Adi Peterfi97% (38)
- Organograma ASME IX Art. I PDFDocument4 pagesOrganograma ASME IX Art. I PDFfabiocorreasilvaNo ratings yet
- Distance ProtectionDocument21 pagesDistance Protectiondesilvatharindu1No ratings yet
- 2018 General Education Reviewer Part 10 - 50 Questions With Answers - LET EXAM - Questions & AnswersDocument10 pages2018 General Education Reviewer Part 10 - 50 Questions With Answers - LET EXAM - Questions & AnswersScribdNo ratings yet
- International Emergency Nursing: Karen Hammad, Lingli Peng, Olga Anikeeva, Paul Arbon, Huiyun Du, Yinglan LiDocument5 pagesInternational Emergency Nursing: Karen Hammad, Lingli Peng, Olga Anikeeva, Paul Arbon, Huiyun Du, Yinglan LiRuly AryaNo ratings yet
- BU - Assignment 2 PDFDocument2 pagesBU - Assignment 2 PDFMaliha FarzanaNo ratings yet
- Fostering Innovation Through Experiential LearningDocument14 pagesFostering Innovation Through Experiential LearningAndrew TranNo ratings yet
- Happier at Home by Gretchen Rubin - ExcerptDocument39 pagesHappier at Home by Gretchen Rubin - ExcerptCrown Publishing Group69% (16)
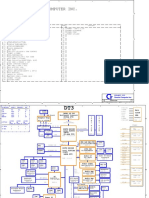
- Acer Aspire 1710 (Quanta DT3) PDFDocument35 pagesAcer Aspire 1710 (Quanta DT3) PDFMustafa AkanNo ratings yet
- Employees Management On Sport DevelopmenDocument7 pagesEmployees Management On Sport DevelopmenBeky AbrahamNo ratings yet
- Test Bank For The Human Body in Health and Disease 7th Edition by PattonDocument11 pagesTest Bank For The Human Body in Health and Disease 7th Edition by PattonLaurence Pence100% (23)
- Odato G-7 LP HomonymsDocument11 pagesOdato G-7 LP HomonymsIvy OdatoNo ratings yet
- Container Generator Qac Qec Leaflet EnglishDocument8 pagesContainer Generator Qac Qec Leaflet EnglishGem RNo ratings yet
- TUDelft Clay Suction PDFDocument8 pagesTUDelft Clay Suction PDFDing LiuNo ratings yet
- LP Fuel Gas SystemDocument6 pagesLP Fuel Gas SystemAnonymous QSfDsVxjZNo ratings yet
- Human Persons Are Oriented Toward Their Impending DeathDocument40 pagesHuman Persons Are Oriented Toward Their Impending DeathNaddy Retxed100% (1)
- hts336555 Philips Manual PDFDocument35 pageshts336555 Philips Manual PDFSalomão SouzaNo ratings yet
- No+bake+ing +vol+iiDocument132 pagesNo+bake+ing +vol+iiEugeny TikhomirovNo ratings yet
- The Collector of Treasures - Long NotesDocument3 pagesThe Collector of Treasures - Long NotesAnimesh BhakatNo ratings yet
- Fugacity CoefficientDocument4 pagesFugacity Coefficientsigit1058No ratings yet
- Srikanth Aadhar Iti CollegeDocument1 pageSrikanth Aadhar Iti CollegeSlns AcptNo ratings yet
- Process Validation - SDF - 1 - FDA PDFDocument111 pagesProcess Validation - SDF - 1 - FDA PDFdipakrussiaNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)From EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Rating: 4 out of 5 stars4/5 (1)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- 2084: Artificial Intelligence and the Future of HumanityFrom Everand2084: Artificial Intelligence and the Future of HumanityRating: 4 out of 5 stars4/5 (81)
- Midjourney Mastery - The Ultimate Handbook of PromptsFrom EverandMidjourney Mastery - The Ultimate Handbook of PromptsRating: 4.5 out of 5 stars4.5/5 (2)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeFrom EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeRating: 4.5 out of 5 stars4.5/5 (69)
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- The Digital Mind: How Science is Redefining HumanityFrom EverandThe Digital Mind: How Science is Redefining HumanityRating: 4.5 out of 5 stars4.5/5 (2)
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet