You might also like
- Repair ABS Unit PassatDocument13 pagesRepair ABS Unit Passatbars_winner100% (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- JHS 182 Service ManualDocument168 pagesJHS 182 Service Manualbg2tt100% (5)
- DC/DC Converter Operation GuideDocument6 pagesDC/DC Converter Operation GuidesaeidraminaNo ratings yet
- Charging SystemDocument41 pagesCharging SystemazryNo ratings yet
- CH 4 - DC-DC ConvertersDocument52 pagesCH 4 - DC-DC ConvertersTsegau Hagos100% (1)
- DC-DC Converters - Jaycar Tech NotesDocument5 pagesDC-DC Converters - Jaycar Tech Noteskimbalsummers801No ratings yet
- GMSK With GNU RadioDocument10 pagesGMSK With GNU RadioRakesh S KNo ratings yet
- 9 Basic DC To DC Converter CircuitsDocument40 pages9 Basic DC To DC Converter Circuitsuser123phc100% (1)
- Buck ReportDocument9 pagesBuck ReportNaeem GulNo ratings yet
- Crane Technical Data SheetDocument7 pagesCrane Technical Data Sheet98675No ratings yet
- 1TXH000416C0201 - OVR Practical Guide QuickSafe - ENDocument146 pages1TXH000416C0201 - OVR Practical Guide QuickSafe - ENFabio CostaNo ratings yet
- Electronic Service Manual PDFDocument110 pagesElectronic Service Manual PDFvictor50% (2)
- Design Tips For An Efficient Non-InvertingDocument8 pagesDesign Tips For An Efficient Non-InvertinginnovatorinnovatorNo ratings yet
- DC-DC Buck Converter: Principles and EvolutionDocument36 pagesDC-DC Buck Converter: Principles and EvolutionAnas RajputNo ratings yet
- Common Mistakes in DC-DC ConvertersDocument19 pagesCommon Mistakes in DC-DC ConvertersAlex HuiNo ratings yet
- 4 ChopperDocument54 pages4 ChopperSamiul TashbirNo ratings yet
- AN-H51 Designing A Boost-Buck (Ĉuk) Converter With The HV9930 / AT9933Document15 pagesAN-H51 Designing A Boost-Buck (Ĉuk) Converter With The HV9930 / AT9933JohnNo ratings yet
- DC DC Converter: An Overview of Topologies and OperationDocument27 pagesDC DC Converter: An Overview of Topologies and OperationhmiwukcyNo ratings yet
- Buck Converter-Principle of Operation-Applications - ECE TutorialsDocument5 pagesBuck Converter-Principle of Operation-Applications - ECE TutorialsKAMARUDHEEN KPNo ratings yet
- Control of Boost Type Converter in Discontinuous Conduction Mode by Controlling The Product of Inductor Voltage-SecondDocument8 pagesControl of Boost Type Converter in Discontinuous Conduction Mode by Controlling The Product of Inductor Voltage-Secondseyed mohsen SalehiNo ratings yet
- A Zero-Voltage Switching Full-Bridge DC - DC ConverterDocument8 pagesA Zero-Voltage Switching Full-Bridge DC - DC Convertersuresh100% (1)
- Microcontroller Based DC-DC Cascode Buck-Boost Converter: Sanjeet Kumar Dr. Parsuram ThakuraDocument6 pagesMicrocontroller Based DC-DC Cascode Buck-Boost Converter: Sanjeet Kumar Dr. Parsuram ThakuraNurhayatiNo ratings yet
- Intersil Basics Dec2011Document3 pagesIntersil Basics Dec2011Marius BarNo ratings yet
- (3L) Single-Phase Three-Level Boost Power Factor Correction ConverterDocument6 pages(3L) Single-Phase Three-Level Boost Power Factor Correction ConverterQuickerManNo ratings yet
- Simulation and Design of An Integrated Flyback Converter For D.C UPSDocument5 pagesSimulation and Design of An Integrated Flyback Converter For D.C UPSANKIT PRAJAPATINo ratings yet
- Chapter5 - Part I - Inntrod - Buck ConverterDocument24 pagesChapter5 - Part I - Inntrod - Buck Converterabed najjar100% (1)
- The Control Unit of A Single Phase Voltage Regulator: December 2010Document7 pagesThe Control Unit of A Single Phase Voltage Regulator: December 2010ankur rathiNo ratings yet
- Power Electronics by D. W. Hart Chapter 07Document18 pagesPower Electronics by D. W. Hart Chapter 07Syed AfzalNo ratings yet
- Bou Jel Ben 2017Document8 pagesBou Jel Ben 2017Bhavana DornalaNo ratings yet
- Topologies For Switched Mode Power SuppliesDocument18 pagesTopologies For Switched Mode Power Suppliesgreenman33a2815100% (5)
- Design and Implementation of Bi-Directional DC-DCDocument6 pagesDesign and Implementation of Bi-Directional DC-DCkkkNo ratings yet
- Presentation - Presentation: DC To DC ConverterDocument20 pagesPresentation - Presentation: DC To DC ConverterDev Kumar100% (2)
- DC dc081113Document70 pagesDC dc081113G.MUTHURAM HICET STAFF EEENo ratings yet
- Operation Principles of Bi-Directional Full-Bridge DCDC Converter With Unified Soft-Switching Scheme and Soft-Starting CapabilityDocument8 pagesOperation Principles of Bi-Directional Full-Bridge DCDC Converter With Unified Soft-Switching Scheme and Soft-Starting CapabilityJie99No ratings yet
- Boost Interleaved Buck Boost ConverterDocument7 pagesBoost Interleaved Buck Boost ConverterSrikanth PolisettyNo ratings yet
- DC Choppers MaterialDocument52 pagesDC Choppers MaterialWitchayut SudthanyaratNo ratings yet
- Bidirectional DC-DC Converter Modeling and Unified Controller With Digital ImplementationDocument7 pagesBidirectional DC-DC Converter Modeling and Unified Controller With Digital ImplementationVo Thanh TungNo ratings yet
- Analysis and Implementation of A Bidirectional Converter With High Conversion RatioDocument6 pagesAnalysis and Implementation of A Bidirectional Converter With High Conversion RatiosamuraiNo ratings yet
- High Frequency Power Converters: Application NoteDocument9 pagesHigh Frequency Power Converters: Application NotejahernandesNo ratings yet
- Buck Boost ConvertersDocument33 pagesBuck Boost ConvertersMuneerAhmed0% (1)
- CCM Vs DCMDocument27 pagesCCM Vs DCMErnesto Gonzalez UrdanetaNo ratings yet
- Synchronous Rectifiers Enable High Efficiency For Buck-Boost ConverterDocument4 pagesSynchronous Rectifiers Enable High Efficiency For Buck-Boost ConverterSmakshi ChoudharyNo ratings yet
- DC Motor Drives (Switched Mode Converter)Document23 pagesDC Motor Drives (Switched Mode Converter)Zafirah HanafiNo ratings yet
- Analysis and Design of High Step-Up DC-DC Converter With Coupled-Inductor TechniqueDocument6 pagesAnalysis and Design of High Step-Up DC-DC Converter With Coupled-Inductor Techniqueharis shehzadNo ratings yet
- A Implementation of Single-Switch Nonisolated Transformerless Buck-Boost DC-DC ConverterDocument6 pagesA Implementation of Single-Switch Nonisolated Transformerless Buck-Boost DC-DC ConverterKPCYP COHODNo ratings yet
- Analysis of bidirectional buck boost converter using PWM controlDocument4 pagesAnalysis of bidirectional buck boost converter using PWM controlmithunprayagNo ratings yet
- Non Isolated High Gain DC DC Converters PDFDocument3 pagesNon Isolated High Gain DC DC Converters PDFnkaNo ratings yet
- Last PDF of Project ReportDocument18 pagesLast PDF of Project ReportRAVINA MANGAL100% (1)
- SMPS Application NotesDocument4 pagesSMPS Application Notesalguien1972No ratings yet
- Module 4 - DC Motor Drives ChopperDocument12 pagesModule 4 - DC Motor Drives ChoppersyakirmustapaNo ratings yet
- Av02 3698en An 1043 Common Mode NoiseDocument5 pagesAv02 3698en An 1043 Common Mode NoiseSirJones KekapohNo ratings yet
- DC DC Converters (Lecture#03)Document40 pagesDC DC Converters (Lecture#03)usmangul_23No ratings yet
- Frequency-Controlled Resonant Converter With Push-Pull Class-E InverterDocument6 pagesFrequency-Controlled Resonant Converter With Push-Pull Class-E InverterMalik ArslanNo ratings yet
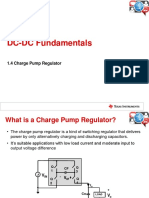
- DC-DC Fundamentals: 1.4 Charge Pump RegulatorDocument10 pagesDC-DC Fundamentals: 1.4 Charge Pump RegulatorIvan FloresNo ratings yet
- DC-DC Converter Implementation With Wide Output Voltage OperationDocument12 pagesDC-DC Converter Implementation With Wide Output Voltage OperationsaptadipNo ratings yet
- Introduction To DC-DC Conversion: A Buck Converter or A Step-Down ConverterDocument29 pagesIntroduction To DC-DC Conversion: A Buck Converter or A Step-Down ConverterAnonymous 7ZMkLN0PcNo ratings yet
- Double Boost Converter Design CalculationDocument4 pagesDouble Boost Converter Design CalculationmoeNo ratings yet
- P 2Document17 pagesP 2AnushreeNo ratings yet
- Flyback Converter Design Guide for Low Power ApplicationsDocument6 pagesFlyback Converter Design Guide for Low Power ApplicationskhsniperNo ratings yet
- PE Lecture 6Document25 pagesPE Lecture 6ahmed el-sayedNo ratings yet
- Eco Line P60/270 - 290 W: Polycrystalline Module FamilyDocument2 pagesEco Line P60/270 - 290 W: Polycrystalline Module FamilyAlberto Méndez CarreraNo ratings yet
- Potentiometer 1Document19 pagesPotentiometer 1Kritika GuptaNo ratings yet
- Especificaciones Motores de ArranqueDocument19 pagesEspecificaciones Motores de ArranqueVictor LuqueNo ratings yet
- Electronic Shop PracticeDocument6 pagesElectronic Shop PracticeAbid TonmoyNo ratings yet
- Kenwood KVT 915Document98 pagesKenwood KVT 915Juan SolisNo ratings yet
- Data and Computer Communications: - Local Area NetworkDocument55 pagesData and Computer Communications: - Local Area NetworkPria JayaNo ratings yet
- Battery Link Dbdc10 Manual 1278Document12 pagesBattery Link Dbdc10 Manual 1278edward blancoNo ratings yet
- ns0106 Ethernet Switch Datasheet PDFDocument2 pagesns0106 Ethernet Switch Datasheet PDFen.mohamedalfaiselNo ratings yet
- Precision-T5400 User's Guide En-UsDocument316 pagesPrecision-T5400 User's Guide En-UshhblizzardNo ratings yet
- LVPED221003ENDocument54 pagesLVPED221003ENtammamshNo ratings yet
- 1620015842-Temperature Protection of 3 Phase MotorsDocument4 pages1620015842-Temperature Protection of 3 Phase MotorsAnil MishraNo ratings yet
- DCT 2000Document2 pagesDCT 2000ricardocuberosNo ratings yet
- Chapter 13 - Frequency ResponseDocument63 pagesChapter 13 - Frequency ResponseGeoFurriel100% (1)
- Autonics Psan Series ManualDocument1 pageAutonics Psan Series ManualResaKandhyNo ratings yet
- Unit 2 - 1Document19 pagesUnit 2 - 1dollyNo ratings yet
- 6300-103C Powershield 8 Configuration ManualDocument89 pages6300-103C Powershield 8 Configuration Manualcosmin cosmin.voinaNo ratings yet
- V-I Characteristics of PN Junction DiodeDocument7 pagesV-I Characteristics of PN Junction DiodemanishNo ratings yet
- 2007-Wiechmann-Measurement of Cathodic Currents in Equipotential Inter-Cell Bars For Copper Electrowinning and Electrorefining PlantsDocument6 pages2007-Wiechmann-Measurement of Cathodic Currents in Equipotential Inter-Cell Bars For Copper Electrowinning and Electrorefining PlantsReza BagheriNo ratings yet
- 8-Bit Gray Code Converter: by Martin Serena, Dang Ly, Khoa LyDocument58 pages8-Bit Gray Code Converter: by Martin Serena, Dang Ly, Khoa LyAndreSantosNo ratings yet
- KDR600 Series: Primary Connector KitDocument4 pagesKDR600 Series: Primary Connector KitPoelmp PakpahanNo ratings yet
- MKE SERIES NON CYCLING INTEGRATED FILTRATION COMPRESSED AIR DRYERSDocument1 pageMKE SERIES NON CYCLING INTEGRATED FILTRATION COMPRESSED AIR DRYERSesmail aliNo ratings yet
- Danfoss B35C5B R600a 115 60Document4 pagesDanfoss B35C5B R600a 115 60ARTURO GALINDONo ratings yet
- AUX-C T4-T5-T6 1Q 1SY 250 Vac/dcDocument3 pagesAUX-C T4-T5-T6 1Q 1SY 250 Vac/dcGaston PaezNo ratings yet