You might also like
- Variable Capacity CompressorsDocument41 pagesVariable Capacity CompressorszdravkorrNo ratings yet
- TD Isolette C2000 C2000eDocument212 pagesTD Isolette C2000 C2000eEco Aquiles100% (1)
- ATS Operation and Installation ManualKohler PDFDocument76 pagesATS Operation and Installation ManualKohler PDFJuan Henriquez100% (1)
- Technical Audit Report 500 KV Grid Station NTDC ShikarpurDocument10 pagesTechnical Audit Report 500 KV Grid Station NTDC ShikarpurEngr Fahimuddin QureshiNo ratings yet
- Elite Manual de ServiçoDocument196 pagesElite Manual de ServiçoCarlos Flores100% (1)
- Control Valve Technical SpecificationDocument17 pagesControl Valve Technical Specificationzainrajakmawi100% (2)
- 60076-20 TS 2017Document40 pages60076-20 TS 2017Jora Saragi100% (1)
- Air Equipment Compressors Compressor 100 130CFM D XAS 66G Operation ManualDocument40 pagesAir Equipment Compressors Compressor 100 130CFM D XAS 66G Operation ManualCosmin Ion BlajaNo ratings yet
- Mastering Stm32 SampleDocument119 pagesMastering Stm32 SampleRached Mairchi100% (1)
- Questionnaire and Objectives On Brand Perception On DellDocument4 pagesQuestionnaire and Objectives On Brand Perception On Dellamuthaamba100% (1)
- Instruction Manual: FL 200 Transmitted Light PolariscopeDocument33 pagesInstruction Manual: FL 200 Transmitted Light PolariscopesajjadNo ratings yet
- Netys Rt1,1 3kva Msmnetrtxx31 GB - 01Document36 pagesNetys Rt1,1 3kva Msmnetrtxx31 GB - 01Anuradhe ThilakarathnaNo ratings yet
- ILD8150XUMA1 Infineon TechnologiesDocument20 pagesILD8150XUMA1 Infineon Technologiespatrick corcueraNo ratings yet
- Infineon BGT60LTR11AIP DataSheet v02 - 05 ENDocument13 pagesInfineon BGT60LTR11AIP DataSheet v02 - 05 ENลิขิตฟ้ากำหนดมา ให้เป็นช่างNo ratings yet
- Infineon Infineon TLE8080EM DS v01 02 enDocument38 pagesInfineon Infineon TLE8080EM DS v01 02 enYael AlcaNo ratings yet
- Infineon FD250R65KE3 K DataSheet v01 - 10 ENDocument17 pagesInfineon FD250R65KE3 K DataSheet v01 - 10 ENVaisakhMohanNo ratings yet
- Logamatic LongatewayDocument48 pagesLogamatic Longatewaydouville.pierreNo ratings yet
- Infineon TLE4988C - CamshaftSensor - DS DataSheet v01 - 00 ENDocument13 pagesInfineon TLE4988C - CamshaftSensor - DS DataSheet v01 - 00 ENAhmad AzharNo ratings yet
- DLT-200 Serie UPS User ManualDocument36 pagesDLT-200 Serie UPS User ManualINZAMAM MUSHTAQ100% (1)
- Seagate Barracuda 7200.7Document54 pagesSeagate Barracuda 7200.7Radu ConstantinNo ratings yet
- Magnetic FlowmetersDocument72 pagesMagnetic FlowmetersJuan Manuel EscorihuelaNo ratings yet
- S000083090en 2Document9 pagesS000083090en 2rscheuermannNo ratings yet
- Ren Raa214401 DST 20221006Document14 pagesRen Raa214401 DST 20221006VanHieu LuyenNo ratings yet
- Seagate Barracuda Internal Hard Drive ManualDocument44 pagesSeagate Barracuda Internal Hard Drive ManualJuanjo Fernandez ImazNo ratings yet
- SD315D Manual V200 ENDocument82 pagesSD315D Manual V200 ENFredNo ratings yet
- FeatherWing User ManualDocument42 pagesFeatherWing User ManualbocarocaNo ratings yet
- Doku 220161 E 1Document120 pagesDoku 220161 E 1Sefa AkdemirNo ratings yet
- Super Mω Hitester: SM7810 SM7810-20Document76 pagesSuper Mω Hitester: SM7810 SM7810-20Eko SutjiptoNo ratings yet
- Infineon-Motor Control Shield With IFX007T For Arduino-UserManual-V02 00-EnDocument15 pagesInfineon-Motor Control Shield With IFX007T For Arduino-UserManual-V02 00-EnMR. VAIBHAVSINGH VARMANo ratings yet
- Low Impedance Bus Differential System: Grid SolutionsDocument532 pagesLow Impedance Bus Differential System: Grid SolutionsMahmoud El GendyNo ratings yet
- Dsl1 Ecu - Reference Manual: Baldur Gíslason March 28, 2020Document35 pagesDsl1 Ecu - Reference Manual: Baldur Gíslason March 28, 2020vicky khanNo ratings yet
- Manual HD Seagate ST1000DM003 PDFDocument44 pagesManual HD Seagate ST1000DM003 PDFfernbrNo ratings yet
- Rosemount 2120 Level Switch: Vibrating ForkDocument72 pagesRosemount 2120 Level Switch: Vibrating ForkDaniel CortesNo ratings yet
- Elco Burner Manual May 2018Document64 pagesElco Burner Manual May 2018Ataca AvhaNo ratings yet
- Vector 8100Document278 pagesVector 8100turrichuNo ratings yet
- Digital Magnetometer: Xtrinsic MAG3110 Three-AxisDocument30 pagesDigital Magnetometer: Xtrinsic MAG3110 Three-Axislevietphong100% (1)
- Infineon TLE9104SH DataSheet v01 - 31 ENDocument35 pagesInfineon TLE9104SH DataSheet v01 - 31 ENMohamed AbdulmaksoudNo ratings yet
- Solis Manual S6-GR1P (2.5-6) K-S FN EUR V1.0 (20230419) USBDocument47 pagesSolis Manual S6-GR1P (2.5-6) K-S FN EUR V1.0 (20230419) USBSandra MuñozNo ratings yet
- Manual SRA L XD SingleBoard 1 4Document70 pagesManual SRA L XD SingleBoard 1 4Jhonata MatsukuraNo ratings yet
- Tle8102Sg: Smart Dual Channel Powertrain Switch CoreflexDocument34 pagesTle8102Sg: Smart Dual Channel Powertrain Switch CoreflexMiguel Angel de la Cruz de la CruzNo ratings yet
- Infineon TLE4946 2L DataSheet v01 10 EN-3363804Document13 pagesInfineon TLE4946 2L DataSheet v01 10 EN-3363804davidNo ratings yet
- LIS2L02AL: Mems Inertial Sensor: 2-Axis - +/-2g Ultracompact Linear AccelerometerDocument17 pagesLIS2L02AL: Mems Inertial Sensor: 2-Axis - +/-2g Ultracompact Linear AccelerometerFaisaludinNo ratings yet
- TLE5012B: 1 FeaturesDocument51 pagesTLE5012B: 1 FeaturesAbdi PrasetyoNo ratings yet
- Disco Duro ST380011ADocument54 pagesDisco Duro ST380011ARaul Carlos Ramirez AguirreNo ratings yet
- Qbsofthand User Guide General 1.0.2Document66 pagesQbsofthand User Guide General 1.0.2hello233No ratings yet
- Infineon FP100R12N3T7 DataSheet v00 - 21 ENDocument21 pagesInfineon FP100R12N3T7 DataSheet v00 - 21 ENrajat tiwariNo ratings yet
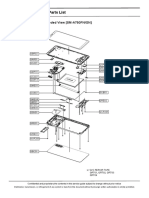
- Room Air Conditioner: Service ManualDocument39 pagesRoom Air Conditioner: Service ManualSakthivel PNo ratings yet
- CC-LINK Interface: SR83 Digital ControllerDocument24 pagesCC-LINK Interface: SR83 Digital ControllerChristianNo ratings yet
- Service: Ceramic Glass HobDocument25 pagesService: Ceramic Glass HobНиколай ЧупринаNo ratings yet
- PMA7105Document200 pagesPMA7105Alberto MontillaNo ratings yet
- 1EDN7550 and 1EDN8550: Feature ListDocument21 pages1EDN7550 and 1EDN8550: Feature ListЕвгений ИвановNo ratings yet
- Leopard General and in Stal Tion InformationDocument18 pagesLeopard General and in Stal Tion InformationChandrasekhar SonarNo ratings yet
- Digital Servo Amplifier Servo Star 601... 620: Assembly, Installation, SetupDocument100 pagesDigital Servo Amplifier Servo Star 601... 620: Assembly, Installation, SetupPaul RidgeNo ratings yet
- A400 Startup Manual Part2 v7.1Document40 pagesA400 Startup Manual Part2 v7.1mkgdy6nj4kNo ratings yet
- HA030554 - 8 Nanodac User Manual PDFDocument394 pagesHA030554 - 8 Nanodac User Manual PDFPopa FlorinNo ratings yet
- 1088 ManualDocument279 pages1088 ManualMamour brshimNo ratings yet
- Venmar Air Exchanger Constructo 2.0 ManualDocument8 pagesVenmar Air Exchanger Constructo 2.0 ManualTitel StanNo ratings yet
- Yokogawa PDT ManualDocument83 pagesYokogawa PDT Manualvikkoo7No ratings yet
- Manual GSP 1094BDocument131 pagesManual GSP 1094Brichardt999No ratings yet
- XDPL8105 - Digital Flyback Controller IC: About This DocumentDocument33 pagesXDPL8105 - Digital Flyback Controller IC: About This Documentzuffflor_925748656No ratings yet
- Pipeline HD.2 Series SATA: Product ManualDocument50 pagesPipeline HD.2 Series SATA: Product ManualManuel CastroNo ratings yet
- Advanced Millimeter-wave Technologies: Antennas, Packaging and CircuitsFrom EverandAdvanced Millimeter-wave Technologies: Antennas, Packaging and CircuitsDuixian LiuNo ratings yet
- Digital Compensation for Analog Front-Ends: A New Approach to Wireless Transceiver DesignFrom EverandDigital Compensation for Analog Front-Ends: A New Approach to Wireless Transceiver DesignNo ratings yet
- SAA Operating ManualDocument117 pagesSAA Operating ManualDeniz KutanNo ratings yet
- Loggernet and Lnserver SDK - ManDocument200 pagesLoggernet and Lnserver SDK - ManDeniz KutanNo ratings yet
- Nano Vna 2.2Document36 pagesNano Vna 2.2Andres Videla FloresNo ratings yet
- MCUXpresso SDK API Reference Manual - MKL43Z4Document993 pagesMCUXpresso SDK API Reference Manual - MKL43Z4Deniz KutanNo ratings yet
- 210760-002 80286 Hardware Reference Manual 1987Document255 pages210760-002 80286 Hardware Reference Manual 1987Deniz KutanNo ratings yet
- GerdDocument2 pagesGerdDeniz KutanNo ratings yet
- CheeseDocument1 pageCheeseDeniz KutanNo ratings yet
- Unhaggle 2022 Toyota Corolla Cross 2 0 Le CVT 4wd 5dr 20220302164736Document9 pagesUnhaggle 2022 Toyota Corolla Cross 2 0 Le CVT 4wd 5dr 20220302164736Deniz KutanNo ratings yet
- Unhaggle 2022 Toyota Corolla Hybrid CVT Li 20220302164154Document9 pagesUnhaggle 2022 Toyota Corolla Hybrid CVT Li 20220302164154Deniz KutanNo ratings yet
- Unhaggle 2022 Toyota Corolla Se CVT 20220302171705Document10 pagesUnhaggle 2022 Toyota Corolla Se CVT 20220302171705Deniz KutanNo ratings yet
- Unhaggle 2022 Toyota Corolla Le CVT 20220302164913Document9 pagesUnhaggle 2022 Toyota Corolla Le CVT 20220302164913Deniz KutanNo ratings yet
- CW-3000 Industrial Chiller User ManualDocument12 pagesCW-3000 Industrial Chiller User ManualPARTHIBAN RETECHNo ratings yet
- Sm-A750fn Common Evapl 3Document2 pagesSm-A750fn Common Evapl 3J Carlos Menacho SNo ratings yet
- ManualDocument56 pagesManual- Y.D.V-No ratings yet
- LHP-30D Datasheet 20170904Document2 pagesLHP-30D Datasheet 20170904Ranses RomanNo ratings yet
- Whirlpool ADG6550 IxDocument17 pagesWhirlpool ADG6550 Ixairwolf4226100% (1)
- FTang C310 17-04-19Document4 pagesFTang C310 17-04-19bolsjhevikNo ratings yet
- Iec 60076 24 2020Document11 pagesIec 60076 24 2020Fardhani RozakNo ratings yet
- DMX3 Acb PDFDocument44 pagesDMX3 Acb PDFSunny K INo ratings yet
- Pca 6003Document1 pagePca 6003drmnsyhNo ratings yet
- MGE Motors: Installation and Operating InstructionsDocument76 pagesMGE Motors: Installation and Operating InstructionsJocelito MaiaNo ratings yet
- Water Quality Monitoring and Notification System U PDFDocument4 pagesWater Quality Monitoring and Notification System U PDFMukund KumarNo ratings yet
- ARM® and Thumb®-2 Instruction Set Quick Reference CardDocument6 pagesARM® and Thumb®-2 Instruction Set Quick Reference CardpavankrishnatNo ratings yet
- Forms of Energy ArticleDocument4 pagesForms of Energy Articleapi-293092810No ratings yet
- ATR Tech WebDocument3 pagesATR Tech WebAudioDuck22No ratings yet
- Physics Sample Papers 2022-23 QPDocument42 pagesPhysics Sample Papers 2022-23 QPOJASisLiveNo ratings yet
- Cheetah Log FileDocument231 pagesCheetah Log FileyosangyuNo ratings yet
- Toshiba Satellite E55 ZRMAA Compal LA-A481P Rev1.0 SchematicDocument55 pagesToshiba Satellite E55 ZRMAA Compal LA-A481P Rev1.0 SchematicdataNo ratings yet
- Soft Start Circuit PDFDocument3 pagesSoft Start Circuit PDFnylashahidNo ratings yet
- Smart MaterialsDocument1 pageSmart MaterialsThejas GowdaNo ratings yet
- Storageworks Msa1000Document52 pagesStorageworks Msa1000Hari RamadhaniNo ratings yet
- Datasheet - H8CA-SAL OMRON - MÁQ FEZERDocument15 pagesDatasheet - H8CA-SAL OMRON - MÁQ FEZERMarcelo Vitali PagnussattNo ratings yet
- Android List FreewareDocument24 pagesAndroid List FreewareBoedisantosoNo ratings yet
- T4 F Electric CircuitDocument9 pagesT4 F Electric CircuitNowNo ratings yet
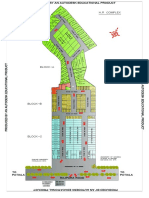
- H.R Complex: Rajpura Road TO Patiala TO PatialaDocument1 pageH.R Complex: Rajpura Road TO Patiala TO Patialaprabhjeet singh antalNo ratings yet