You might also like
- Quantitative Twisted Patterns in Positive Density Subsets Kamil Bulinski, Alexander Fish - Magyar - Furstenberg - Laurent DenisDocument15 pagesQuantitative Twisted Patterns in Positive Density Subsets Kamil Bulinski, Alexander Fish - Magyar - Furstenberg - Laurent DenisSam TaylorNo ratings yet
- Functional Equations BookDocument10 pagesFunctional Equations BookMark ZuNo ratings yet
- Distance Functions For Reproducing Kernel Hilbert SpacesDocument29 pagesDistance Functions For Reproducing Kernel Hilbert SpacesHogeck BarreraNo ratings yet
- Ijpam 2Document10 pagesIjpam 2tradutoraNo ratings yet
- PDE Weak SolutionsDocument20 pagesPDE Weak SolutionsLucasMartinsRochaNo ratings yet
- Belkhelfa GoodDocument7 pagesBelkhelfa GoodMohammed AbdelmalekNo ratings yet
- Residues PDFDocument23 pagesResidues PDFJimmy Támara AlbinoNo ratings yet
- M2504 Lec 06Document11 pagesM2504 Lec 06Mokoepa LipholoNo ratings yet
- BS08 Lin02 Pak09 Kir34 BL00 Tas14 PST16 MT16Document11 pagesBS08 Lin02 Pak09 Kir34 BL00 Tas14 PST16 MT16Deden PalutraNo ratings yet
- Extreme Values: 2.1 Maxima and Minima For Functions of Two VariablesDocument12 pagesExtreme Values: 2.1 Maxima and Minima For Functions of Two VariablesZaheer KhanNo ratings yet
- Hermite-Hadamard-Fej Er Type Inequalities For P-Convex FunctionsDocument16 pagesHermite-Hadamard-Fej Er Type Inequalities For P-Convex FunctionsSo NiaNo ratings yet
- A HardyDocument9 pagesA HardyCristhian Felipe Luengas MoraNo ratings yet
- On Spectral Deformations and Singular Weyl Functions For One-Dimensional Dirac OperatorsDocument12 pagesOn Spectral Deformations and Singular Weyl Functions For One-Dimensional Dirac OperatorshungkgNo ratings yet
- SpacesofmodularformsDocument10 pagesSpacesofmodularformsI'm in, AlertNo ratings yet
- 2003 - (DESHPANDE) A Review of Non-Commutative Gauge TheoriesDocument10 pages2003 - (DESHPANDE) A Review of Non-Commutative Gauge Theoriesfaudzi5505No ratings yet
- On MT Convexity: Mevl Ut Tunc and H Useyin YILDIRIMDocument6 pagesOn MT Convexity: Mevl Ut Tunc and H Useyin YILDIRIMSo NiaNo ratings yet
- Hermite Hadamard (S, M) ConvexDocument8 pagesHermite Hadamard (S, M) ConvexMiguel Vivas CortezNo ratings yet
- X (X, X y (Y, y X, y .: ExerciseDocument6 pagesX (X, X y (Y, y X, y .: ExerciseMario ZamoraNo ratings yet
- Comparison of The Bergman and Szegö KernelsDocument19 pagesComparison of The Bergman and Szegö KernelsChien LinNo ratings yet
- Chap 2Document44 pagesChap 2Arthur StivanelloNo ratings yet
- 8.821 F2008 Lecture 02: String Theory Summary Continued: Lecturer: Mcgreevy Scribe: McgreevyDocument6 pages8.821 F2008 Lecture 02: String Theory Summary Continued: Lecturer: Mcgreevy Scribe: McgreevyGerman ChiappeNo ratings yet
- Unitary Monodromy of Lam e Differential Operators: F.Beukers May 17, 2007Document15 pagesUnitary Monodromy of Lam e Differential Operators: F.Beukers May 17, 2007SilviuNo ratings yet
- CH7m PDFDocument26 pagesCH7m PDFQa SimNo ratings yet
- Fundamentals of PAUT - 37-39Document3 pagesFundamentals of PAUT - 37-39Kevin HuangNo ratings yet
- Kuzmenko, Shpakivskyi - Hausdorff Analytic Functions in A 3-Dimensional Associative Noncommutative Algebra (2022)Document15 pagesKuzmenko, Shpakivskyi - Hausdorff Analytic Functions in A 3-Dimensional Associative Noncommutative Algebra (2022)MarkoGeekyNo ratings yet
- 480 Recitation 6Document2 pages480 Recitation 6JeffSchuelerNo ratings yet
- Assignment 1 Barton Zwiebach MITDocument6 pagesAssignment 1 Barton Zwiebach MITJhon FlorezNo ratings yet
- Key Words and Phrases. Convex, S Convex, S Convex, Dragomir, Pearce, Function, S ConvexDocument4 pagesKey Words and Phrases. Convex, S Convex, S Convex, Dragomir, Pearce, Function, S ConvexillmrpinheiroNo ratings yet
- 1.1.24 Characterizations and Local Approachs On Isoparametric Surfaces ÖztürkDocument9 pages1.1.24 Characterizations and Local Approachs On Isoparametric Surfaces ÖztürkEmre ÖztürkNo ratings yet
- Funciones S-Convexas 2do Sennse EjemplosDocument11 pagesFunciones S-Convexas 2do Sennse EjemplosMiguel Vivas CortezNo ratings yet
- A000 FVMDocument30 pagesA000 FVMbgpatel8888No ratings yet
- Lecture Notes For Mathematical PhysicsDocument86 pagesLecture Notes For Mathematical PhysicsvkphyNo ratings yet
- Partial Differential Equations NotesDocument13 pagesPartial Differential Equations NotesJoshua LinNo ratings yet
- Dubtsov 2007Document7 pagesDubtsov 2007RagNo ratings yet
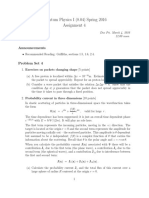
- Quantum Physics I (8.04) Spring 2016 Assignment 4: AnnouncementsDocument5 pagesQuantum Physics I (8.04) Spring 2016 Assignment 4: AnnouncementsFabian M Vargas FontalvoNo ratings yet
- Solutions For Homework Set 7: X Z X I (K X+K Z)Document3 pagesSolutions For Homework Set 7: X Z X I (K X+K Z)rahul krNo ratings yet
- Physics 430: Lecture 13 Driven Oscillations and Resonance: Dale E. GaryDocument9 pagesPhysics 430: Lecture 13 Driven Oscillations and Resonance: Dale E. Garysri kanthNo ratings yet
- Lecture Notes On Multivariable CalculusDocument36 pagesLecture Notes On Multivariable CalculusAnwar ShahNo ratings yet
- Operator-Valued Frames For The Heisenberg GroupDocument13 pagesOperator-Valued Frames For The Heisenberg Groupdonald141No ratings yet
- CS 726: Nonlinear Optimization 1 Lecture 3: Di ErentiabilityDocument22 pagesCS 726: Nonlinear Optimization 1 Lecture 3: Di ErentiabilityHarrisNo ratings yet
- Spherical Waves: 1 The Helmholtz Wave Equation in Spherical CoordinatesDocument4 pagesSpherical Waves: 1 The Helmholtz Wave Equation in Spherical CoordinatesAnonymous BrUMhCjbiBNo ratings yet
- MATH 147 Practice 10 SolutionsDocument4 pagesMATH 147 Practice 10 SolutionshumanstupidityisinsaneNo ratings yet
- Green Function For Klein-Gordon-Dirac EquationDocument6 pagesGreen Function For Klein-Gordon-Dirac Equationdecerto252No ratings yet
- Lec 3 Fem PDFDocument11 pagesLec 3 Fem PDFAbhishekRajNo ratings yet
- 2006 12859arxivDocument11 pages2006 12859arxivBoutiara AbdellatifNo ratings yet
- Homework 4 Problem 1Document3 pagesHomework 4 Problem 1沈智恩No ratings yet
- International Journal of Pure and Applied Mathematics No. 3 2015, 325-337Document14 pagesInternational Journal of Pure and Applied Mathematics No. 3 2015, 325-337Soumya DasguptaNo ratings yet
- Generalized Eigenvalue Proximal Support Vector Machines: T, Y), I 1, 2, ..., M)Document19 pagesGeneralized Eigenvalue Proximal Support Vector Machines: T, Y), I 1, 2, ..., M)sanjay kumarNo ratings yet
- Jacobowitz H - Real Hypersurfaces and Complex AnalysisDocument9 pagesJacobowitz H - Real Hypersurfaces and Complex AnalysislazarNo ratings yet
- SmirnovTurbiner-Hidden Sl2-Algebra of Finite-Difference Equations-Funct-An9512002 PDFDocument7 pagesSmirnovTurbiner-Hidden Sl2-Algebra of Finite-Difference Equations-Funct-An9512002 PDFhelmantico1970No ratings yet
- Metric SpacesDocument31 pagesMetric SpacesZxzxzxz007No ratings yet
- Mathematics: Jensen-Type Inequalities For (H, G M) - Convex FunctionsDocument8 pagesMathematics: Jensen-Type Inequalities For (H, G M) - Convex FunctionsPiyush KhandelwalNo ratings yet
- PHYS532 - Quantum Mechanics II Problem Set 5 DueDocument2 pagesPHYS532 - Quantum Mechanics II Problem Set 5 DuewaskhezNo ratings yet
- A Brief Introduction To Weak Formulations of Pdes and The Finite Element MethodDocument6 pagesA Brief Introduction To Weak Formulations of Pdes and The Finite Element Methodaapirasteh1402No ratings yet
- PerspectiveDocument26 pagesPerspectiveKeiji MatsumotoNo ratings yet
- 22.101 Applied Nuclear Physics: Fall Term 2009Document4 pages22.101 Applied Nuclear Physics: Fall Term 2009daniam_No ratings yet
- Naturality and Definability II: Wilfrid Hodges and Saharon Shelah Draft, 13 November 2000Document24 pagesNaturality and Definability II: Wilfrid Hodges and Saharon Shelah Draft, 13 November 2000ORBOT EXENo ratings yet
- Krishna's - Integral Calculus, Edition-3Document229 pagesKrishna's - Integral Calculus, Edition-3Jayshri HuddarNo ratings yet
- Product ConvergenceDocument6 pagesProduct ConvergenceSalvador Sánchez PeralesNo ratings yet
- How To Pay by DBSDocument2 pagesHow To Pay by DBSYe GaungNo ratings yet
- FM TransmitterDocument15 pagesFM TransmitterMuhammad Aiman AmranNo ratings yet
- Indian Entrepreneur Fund PresentationDocument44 pagesIndian Entrepreneur Fund PresentationHARIHARAN ANo ratings yet
- 01 B744 B1 ATA 23 Part2Document170 pages01 B744 B1 ATA 23 Part2NadirNo ratings yet
- Wed 0945-Avionics Modernization For LegacyDocument38 pagesWed 0945-Avionics Modernization For LegacygasparferrerNo ratings yet
- Physical and Chemical Changes WorksheetDocument2 pagesPhysical and Chemical Changes Worksheetisabe;llaNo ratings yet
- AclsDocument5 pagesAclsAnonymous vUl83IptiSNo ratings yet
- Withholding Tax LatestDocument138 pagesWithholding Tax LatestJayson Jay JardineroNo ratings yet
- Determination of Distribution Coefficient of Iodine Between Two Immiscible SolventsDocument6 pagesDetermination of Distribution Coefficient of Iodine Between Two Immiscible SolventsRafid Jawad100% (1)
- One Dollar and Eighty-Seven CentsDocument3 pagesOne Dollar and Eighty-Seven CentsAmna RanaNo ratings yet
- Laboratory 1. ANALYSIS OF PLANT PIGMENTS USING PAPER CHROMATOGRAPHYDocument8 pagesLaboratory 1. ANALYSIS OF PLANT PIGMENTS USING PAPER CHROMATOGRAPHYGualberto Tampol Jr.No ratings yet
- Safety Competency TrainingDocument21 pagesSafety Competency TrainingsemajamesNo ratings yet
- Anatomy of A Resume 2Document4 pagesAnatomy of A Resume 2Anna CruzNo ratings yet
- A Financial Analysis of Alibaba Group Holding LTDDocument26 pagesA Financial Analysis of Alibaba Group Holding LTDSrinu Gattu50% (4)
- Risk Management NotesDocument27 pagesRisk Management NoteskomalNo ratings yet
- A Multivariate Model For Analyzing Crime Scene InformationDocument26 pagesA Multivariate Model For Analyzing Crime Scene InformationNorberth Ioan OkrosNo ratings yet
- METCON 6 Quickstart Action PlanDocument9 pagesMETCON 6 Quickstart Action PlanVictorNo ratings yet
- Literature Review of Quality of Healthcare Services in IndiaDocument27 pagesLiterature Review of Quality of Healthcare Services in IndiaMunnangi NagendrareddyNo ratings yet
- Airworthiness Directive: Design Approval Holder's Name: Type/Model Designation(s)Document4 pagesAirworthiness Directive: Design Approval Holder's Name: Type/Model Designation(s)Kris Wuthrich BatarioNo ratings yet
- Scottish Myths and Legends (PDFDrive)Document181 pagesScottish Myths and Legends (PDFDrive)VeraNo ratings yet
- Synonyms, Antonyms, Spelling CorrectionsDocument10 pagesSynonyms, Antonyms, Spelling CorrectionsVenkateswara RasupalliNo ratings yet
- MC DuroDesign EDocument8 pagesMC DuroDesign Epetronela.12No ratings yet
- SAP BW Certification ExamDocument2 pagesSAP BW Certification Examferozece90% (1)
- School Form 7 (SF7) School Personnel Assignment List and Basic ProfileDocument6 pagesSchool Form 7 (SF7) School Personnel Assignment List and Basic ProfileMylen Verana MasadingNo ratings yet
- Tesla Roadster (A) 2014Document25 pagesTesla Roadster (A) 2014yamacNo ratings yet
- Instant Download Developing Management Skills 10th Edition Whetten Test Bank PDF Full ChapterDocument33 pagesInstant Download Developing Management Skills 10th Edition Whetten Test Bank PDF Full Chapterdonaldvioleti7o100% (9)
- Media Evaluation: Laura MaccioDocument16 pagesMedia Evaluation: Laura Maccioapi-26166574No ratings yet
- What Is Thick Film Ceramic PCBDocument13 pagesWhat Is Thick Film Ceramic PCBjackNo ratings yet
- C5 Schematy 1 PDFDocument294 pagesC5 Schematy 1 PDFArtur Arturowski100% (4)
- Diss PDFDocument321 pagesDiss PDFAbdullah GhannamNo ratings yet