You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Review of Design and Control Optimization of Axial Flux PMSM in Renewable-Energy ApplicationsDocument21 pagesReview of Design and Control Optimization of Axial Flux PMSM in Renewable-Energy Applicationsh.nagarjaNo ratings yet
- Refer 5Document14 pagesRefer 5Vaishnavi BharatiNo ratings yet
- Design of a Three-Phase Axial Flux PM Generator for Wind TurbinesDocument19 pagesDesign of a Three-Phase Axial Flux PM Generator for Wind TurbineskaganNo ratings yet
- All - 18 Tie 1044Document10 pagesAll - 18 Tie 1044rasoolNo ratings yet
- Ain Shams Engineering Journal: Enwelum I. Mbadiwe, Erwan Bin SulaimanDocument10 pagesAin Shams Engineering Journal: Enwelum I. Mbadiwe, Erwan Bin SulaimanArkim MakhosaNo ratings yet
- Torque Ripple MitigationDocument20 pagesTorque Ripple MitigationSanjayNo ratings yet
- Design and Optimization of Outer-Rotor Permanent Magnet Fluxswitching Motor Using Transverse Segmental Rotor Shapefor Automotive ApplicationsDocument10 pagesDesign and Optimization of Outer-Rotor Permanent Magnet Fluxswitching Motor Using Transverse Segmental Rotor Shapefor Automotive ApplicationsGeorge LazarNo ratings yet
- IPM Synchronous Motor Design for Gearless ElevatorsDocument7 pagesIPM Synchronous Motor Design for Gearless Elevatorsرجل من الزمن الجميلNo ratings yet
- Parametric Analysis of PMSMDocument16 pagesParametric Analysis of PMSMSanjayNo ratings yet
- IET Renewable Power Gen - 2023 - El‐Hasan - Air‐Cored Axial Flux Permanent Magnet Generator for Direct Driven Micro WindDocument14 pagesIET Renewable Power Gen - 2023 - El‐Hasan - Air‐Cored Axial Flux Permanent Magnet Generator for Direct Driven Micro WindAdrian AbitanNo ratings yet
- Dynamic Modeling of Wind Turbine Based Axial Flux Permanent Magnetic Synchronous Generator Connected To The Grid With Switch Reduced ConverterDocument11 pagesDynamic Modeling of Wind Turbine Based Axial Flux Permanent Magnetic Synchronous Generator Connected To The Grid With Switch Reduced Convertershahin mirzaeiNo ratings yet
- Designand Fem Analysisof Low Voltage Outer Rotor Line Start Permanent Magnet Synchronous Motorswith Different Magnet AlignmentsDocument6 pagesDesignand Fem Analysisof Low Voltage Outer Rotor Line Start Permanent Magnet Synchronous Motorswith Different Magnet AlignmentsPanu Mark IINo ratings yet
- A Design of An Axial Field Permanent Magnet Generator For Small-Scale Water Turbines - Focus On Stacking Factor Effects On PerformanceDocument5 pagesA Design of An Axial Field Permanent Magnet Generator For Small-Scale Water Turbines - Focus On Stacking Factor Effects On PerformanceSantiago GNo ratings yet
- A Novel Axial Air-Gap Transverse Flux Switching PMDocument12 pagesA Novel Axial Air-Gap Transverse Flux Switching PMh.nagarjaNo ratings yet
- Enhancing Performance For Three-Phase Induction Motor by Changing The Magnetic Ux Density and Core Material Using COMSOLDocument12 pagesEnhancing Performance For Three-Phase Induction Motor by Changing The Magnetic Ux Density and Core Material Using COMSOLBudrescu GeorgeNo ratings yet
- Flux Switching Machines A Review On Design and App 221201 004857Document7 pagesFlux Switching Machines A Review On Design and App 221201 004857Rana AtharNo ratings yet
- FEM Based Design and Performance Analysis of 2-Poles Universal MotorDocument15 pagesFEM Based Design and Performance Analysis of 2-Poles Universal MotorBalaji DDNo ratings yet
- Design and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainDocument7 pagesDesign and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainMC ANo ratings yet
- Analysis of An Axial PM Ux Machine With Field Weakening Capability For Engine IntegrationDocument7 pagesAnalysis of An Axial PM Ux Machine With Field Weakening Capability For Engine IntegrationManjuBhashiniNo ratings yet
- J. World. Elect. Eng. Tech. 4 (2) 58-66, 2015Document9 pagesJ. World. Elect. Eng. Tech. 4 (2) 58-66, 2015Bredy LaraNo ratings yet
- Alternative Bridge Spoke Permanent Magnet SynchronDocument9 pagesAlternative Bridge Spoke Permanent Magnet SynchronKathryn ChanNo ratings yet
- Energies 15 07531 v2Document17 pagesEnergies 15 07531 v2akhilesh120No ratings yet
- Modeling and Simulation of A Gearless VaDocument7 pagesModeling and Simulation of A Gearless VaHãrshã SmîlęýNo ratings yet
- Effect of Magnet Size On Torque Characteristic ofDocument5 pagesEffect of Magnet Size On Torque Characteristic ofDavid AzadNo ratings yet
- Effect of Rotor Bars Shape On The Single-Phase Induction Motors Performance: An Analysis Toward Their Efficiency ImprovementDocument25 pagesEffect of Rotor Bars Shape On The Single-Phase Induction Motors Performance: An Analysis Toward Their Efficiency ImprovementDr. Aslan JalalNo ratings yet
- Variable-Flux Outer-Rotor Permanent Magnet Synchronous Motor For In-Wheel Direct-Drive ApplicationsDocument8 pagesVariable-Flux Outer-Rotor Permanent Magnet Synchronous Motor For In-Wheel Direct-Drive Applicationsdeepakmahto.eeNo ratings yet
- Design Optimization of Axial Flux Permanent Magnet Synchronous Machine Using 3d FEMDocument15 pagesDesign Optimization of Axial Flux Permanent Magnet Synchronous Machine Using 3d FEMaugustoNo ratings yet
- An Induction Motor Design For Urban Use Electric Vehicle: September 2016Document7 pagesAn Induction Motor Design For Urban Use Electric Vehicle: September 2016Sasi VardhanNo ratings yet
- Icem 2020Document8 pagesIcem 2020rasoolNo ratings yet
- Design of Axial-Flux Motor For Traction ApplicatioDocument13 pagesDesign of Axial-Flux Motor For Traction Applicatioantriksh mahajanNo ratings yet
- 10 1109@iecon 2018 8591235Document8 pages10 1109@iecon 2018 8591235apacheNo ratings yet
- Axial-Flux Generator Coreless Armature Non-Integral Coil RatioDocument9 pagesAxial-Flux Generator Coreless Armature Non-Integral Coil RatioSeksan KhamkaewNo ratings yet
- .000.0.0.design and Analysis of Generator and ConDocument6 pages.000.0.0.design and Analysis of Generator and ConRabei RomulusNo ratings yet
- Design of Four-Pole Permanent Magnet Motor With Different Rotor Topologies.Document7 pagesDesign of Four-Pole Permanent Magnet Motor With Different Rotor Topologies.kalyanNo ratings yet
- Machines: A Novel Approach To The Design of Axial-Flux Switched-Reluctance MotorsDocument28 pagesMachines: A Novel Approach To The Design of Axial-Flux Switched-Reluctance Motorsrobert_lascuNo ratings yet
- 1 s2.0 S0263224122006534 MainDocument7 pages1 s2.0 S0263224122006534 MainFatma Nur UzunNo ratings yet
- Optimal Design of A Coreless Stator Axial Ux Permanent-Magnet GeneratorDocument11 pagesOptimal Design of A Coreless Stator Axial Ux Permanent-Magnet GeneratorakhilnandanNo ratings yet
- Optimal Design of A Coreless Stator Axial Ux Permanent-Magnet GeneratorDocument11 pagesOptimal Design of A Coreless Stator Axial Ux Permanent-Magnet GeneratorakhilnandanNo ratings yet
- Tak 2020Document18 pagesTak 2020shahin mirzaeiNo ratings yet
- Permanent Magnet Synchronous Generator ThesisDocument4 pagesPermanent Magnet Synchronous Generator Thesisgja8e2sv100% (1)
- Optimal Design of IPM Motors With Different Cooling Systems and WDocument18 pagesOptimal Design of IPM Motors With Different Cooling Systems and WjalilemadiNo ratings yet
- Iet-Epa 2020 0126Document6 pagesIet-Epa 2020 0126Mehdi AminiNo ratings yet
- A Generalized Dynamic Model For Brushless Doubly-Fed Induction MachinesDocument11 pagesA Generalized Dynamic Model For Brushless Doubly-Fed Induction MachinesTarak BenslimaneNo ratings yet
- Analytical Calculation of Performance of Line-Start Permanent-Magnet Synchronous Motors Based On Multi-Damping-Circuit ModelDocument10 pagesAnalytical Calculation of Performance of Line-Start Permanent-Magnet Synchronous Motors Based On Multi-Damping-Circuit ModelPhil's ChannelNo ratings yet
- Super-High-Speed Switched Reluctance Motor For Automotive TractionDocument8 pagesSuper-High-Speed Switched Reluctance Motor For Automotive TractionHarshitha AspariNo ratings yet
- Rotor Slot Distance Effects On Output Parameters in Single Phase Induction MotorsDocument6 pagesRotor Slot Distance Effects On Output Parameters in Single Phase Induction MotorsDr. Aslan JalalNo ratings yet
- Research On A Transverse-Flux Brushless Double-Rotor Machine For Hybrid Electric VehiclesDocument12 pagesResearch On A Transverse-Flux Brushless Double-Rotor Machine For Hybrid Electric VehiclesedumacerenNo ratings yet
- Review of Active Electromagnetic Suspension System: September 2020Document27 pagesReview of Active Electromagnetic Suspension System: September 2020Akshay bypNo ratings yet
- COMPEL: The International Journal For Computation and Mathematics in Electrical and Electronic EngineeringDocument18 pagesCOMPEL: The International Journal For Computation and Mathematics in Electrical and Electronic EngineeringSharvanMvsNo ratings yet
- Referensi Generator V-ShapeDocument13 pagesReferensi Generator V-ShapeRio YudhistiraNo ratings yet
- SCI - Volume 29 - Issue 5 - Pages 2537-2551Document15 pagesSCI - Volume 29 - Issue 5 - Pages 2537-2551Vaishnavi BharatiNo ratings yet
- Permanent Magnet Synchronous Motor ThesisDocument4 pagesPermanent Magnet Synchronous Motor Thesisubkciwwff100% (2)
- Permanent Magnet Synchronous MachineDocument8 pagesPermanent Magnet Synchronous MachineWilli Apupalo NaranjoNo ratings yet
- 492 FerreiraDocument6 pages492 FerreiraRonald LiemNo ratings yet
- 2 67 1490941748 14.ijmperdapr201714Document11 pages2 67 1490941748 14.ijmperdapr201714u2005044No ratings yet
- A Case Study On Design of A Flywheel For Punching Press OperationDocument4 pagesA Case Study On Design of A Flywheel For Punching Press OperationAnkit BhadesiaNo ratings yet
- A Comprehensive Analysis and Implementation of VecDocument24 pagesA Comprehensive Analysis and Implementation of VecNiccolò NuddaNo ratings yet
- Volume 3 Issue 2Document7 pagesVolume 3 Issue 2Nandakishore SNo ratings yet
- Flux Characteristics Analysis of A Single-Phase Tubular Permanent Magnet Linear Motor Based On 3-D Magnetic Equivalent CircuitDocument7 pagesFlux Characteristics Analysis of A Single-Phase Tubular Permanent Magnet Linear Motor Based On 3-D Magnetic Equivalent CircuitRahulKashyapNo ratings yet
- CM600HA-24H: Mitsubishi Igbt ModulesDocument4 pagesCM600HA-24H: Mitsubishi Igbt ModulesLODELBARRIO RDNo ratings yet
- N50H 151021Document1 pageN50H 151021AimmadNo ratings yet
- Torque PowerDocument4 pagesTorque PowerAimmadNo ratings yet
- Switched Reluctance MotorDocument3 pagesSwitched Reluctance MotorAimmadNo ratings yet
- FINALVERSIONDocument11 pagesFINALVERSIONAimmadNo ratings yet
- Script PMSMDocument5 pagesScript PMSMAimmadNo ratings yet
- Sf6 & VCB PDFDocument11 pagesSf6 & VCB PDFAnonymous SkU7PyNo ratings yet
- Microwave BenchDocument32 pagesMicrowave Benchghadei_debasishNo ratings yet
- DLD ManualDocument45 pagesDLD ManualMuhammad UmerNo ratings yet
- Ecd Final PJT ReportDocument7 pagesEcd Final PJT ReportZain UddinNo ratings yet
- The Operational Amplifier in CommutationDocument6 pagesThe Operational Amplifier in CommutationJugurthaHadjarNo ratings yet
- Tu RCV 40MHz PCB Not AssembledDocument8 pagesTu RCV 40MHz PCB Not AssembledVeronica HansonNo ratings yet
- 399 CompatratorDocument7 pages399 CompatratorRohan ShrotriyaNo ratings yet
- 7.1 Grounding: ResourcesDocument7 pages7.1 Grounding: ResourcesTrần Quang TuyênNo ratings yet
- Power Electronic DevicesDocument148 pagesPower Electronic DevicesArpit AgarwalNo ratings yet
- t420 ThinkpadDocument11 pagest420 ThinkpadDwi RachmatNo ratings yet
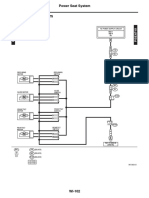
- MSA5T0726A161930 Power Seat System PDFDocument1 pageMSA5T0726A161930 Power Seat System PDFMishu MishuNo ratings yet
- Datasheet: Gva Power Supply System (GPSS) Gpss 221-24Document10 pagesDatasheet: Gva Power Supply System (GPSS) Gpss 221-24ChrisNo ratings yet
- Ark (Radial Thru-Hole) SZ SeriesDocument2 pagesArk (Radial Thru-Hole) SZ Seriesester853No ratings yet
- Trio-20.0-27.6 ErrorDocument9 pagesTrio-20.0-27.6 ErrorRUCNo ratings yet
- Momentum: IIT-JEE 2006 Solutions byDocument11 pagesMomentum: IIT-JEE 2006 Solutions byskgupta45gwlNo ratings yet
- Service Manual: 21F-PA18 21F-PA18 (B) 21F-PD250 21F-PT220Document89 pagesService Manual: 21F-PA18 21F-PA18 (B) 21F-PD250 21F-PT220Kaokab Ibn Khaeruddin MNo ratings yet
- 4-Ch Audio Proc w/ Vol, Bass, Treble & Balance ControlDocument20 pages4-Ch Audio Proc w/ Vol, Bass, Treble & Balance ControlDamianNo ratings yet
- Introduction To Analog and Digital Communication: Chapter 3Document81 pagesIntroduction To Analog and Digital Communication: Chapter 3Amr AbdelnaserNo ratings yet
- Installation, Operation & Maintenance Data Sheet: ApplicationDocument11 pagesInstallation, Operation & Maintenance Data Sheet: ApplicationasssasasNo ratings yet
- Motivation Experimental: Organic Ink Formulation and Photonic-Based ProbeDocument1 pageMotivation Experimental: Organic Ink Formulation and Photonic-Based ProbejohanNo ratings yet
- All India Radio DocumentDocument32 pagesAll India Radio Documentsashi_s2No ratings yet
- Practical-3 Aim: To study basic principle and construction of 3-ϕ induction motorDocument14 pagesPractical-3 Aim: To study basic principle and construction of 3-ϕ induction motorJay SathvaraNo ratings yet
- DC Drive Installation and Operating ManualDocument12 pagesDC Drive Installation and Operating ManualStherzitha SaOtNo ratings yet
- Testo 6740 Data SheetDocument4 pagesTesto 6740 Data SheetDeyvid RabelloNo ratings yet
- Sample PDF of Neet Ug Physicstest Series Notessample ContentDocument15 pagesSample PDF of Neet Ug Physicstest Series Notessample ContentTakiNo ratings yet
- Layout Solns 3Document12 pagesLayout Solns 3VIKRAM KUMARNo ratings yet
- Samsung Cw29z306vbxxecDocument135 pagesSamsung Cw29z306vbxxecf17439100% (3)
- Sony kv-27fs13 27fs17 27fv17 29fv17-c 32fs13 32fs17 34fs13c 34fs17 CH Ba-5Document299 pagesSony kv-27fs13 27fs17 27fv17 29fv17-c 32fs13 32fs17 34fs13c 34fs17 CH Ba-5Rafael GarridoNo ratings yet
- General Description Features: Preliminary Datasheet LP4060ADocument13 pagesGeneral Description Features: Preliminary Datasheet LP4060ANando AguilarNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Complete Electronics Self-Teaching Guide with ProjectsFrom EverandComplete Electronics Self-Teaching Guide with ProjectsRating: 3 out of 5 stars3/5 (2)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Winning in 2025: Digital and Data Transformation: The Keys to SuccessFrom EverandWinning in 2025: Digital and Data Transformation: The Keys to SuccessNo ratings yet
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Foundations of Western Civilization II: A History of the Modern Western World (Transcript)From EverandFoundations of Western Civilization II: A History of the Modern Western World (Transcript)Rating: 4.5 out of 5 stars4.5/5 (12)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)