Volume 8, Issue 6, June – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Human Controlled Search and Rescue Robot with
BLE-based Victim Localization
1 2
Andrew Nold D. Asuncion Deejay Mavrick G. Bañaga
Department of Electronics EngineeringPamantasan ng Department of Electronics EngineeringPamantasan ng
Lungsod ng Maynila Manila, Philippines Lungsod ng Maynila Manila, Philippines
3 4
Stanley Clarence C. Lao Nicholai Allen A. Regalado
Department of Electronics EngineeringPamantasan ng Department of Electronics EngineeringPamantasan ng
Lungsod ng Maynila Manila, Philippines Lungsod ng Maynila Manila, Philippines
5 6
Ralph Lenard L. Rogel Carl Vince Nathaniel T. Taboada
Department of Electronics EngineeringPamantasan ng Department of Electronics EngineeringPamantasan ng
Lungsod ng Maynila Manila, Philippines Lungsod ng Maynila Manila, Philippines
Charles G. Juarizo7 Fernando Victor V. De Vera8
Department of Electronics Engineering Department of Electronics Engineering
Pamantasan ng Lungsod ng Maynila Manila, Philippines Pamantasan ng Lungsod ng Maynila Manila, Philippines
Abstract:- This study presents the development of a Reference [4] – [5] developed a Bluetooth Low
human- controlled ground search and rescue robot with Energy (BLE) based close detection system that is supported
victim localization using modified BLE beacons and an by terrestrial and aerial robots to determine whether such a
ESP32 camera. The system is designed to aid rescuers system is feasible in the localization and detection of victims
during search and rescue operations, reducing their risk in unfamiliar and complex disaster areas. [6] designed an
by providing ambient conditions and live video footage IoT-based multi-function remote-controlled rescue robot
of the vicinity. The system uses Arduino as its system, which uses several technologies like a sensor Global
microcontroller and HC-12 transceiver modules to Positioning System (GPS), single-chip microcomputer, Wi-
wirelessly control the robot. The system is also equipped Fi, and Android. The system uses multiple technologies to
with a GPS Module and a BLE Beacon to track the provide an auxiliary rescue platform with a multi-agent
location of the robot. Through numerous tests, the robot network that incorporates sensing, motion, communication,
can accommodate the rescuers in the localization of and operating capabilities. [7] developed a semi-autonomous
victims, and the researchers recommend further mobile search and rescue robot for alive human detection.
improving some functions of the robot. Their system uses a PIR sensor for human detection, a
joystick, RF technology for control, an ultrasonic sensor for
Keywords:- Ground Search and Rescue Robot, BLE Beacon, obstacle detection, a gas sensor to detect leaks, and an IP
ESP32 Camera, Global Positioning System (GPS), HC-12 camera to analyze and observe environmental conditions. A
Transceiver Module. PIR sensor at the first level detects people using their
radiated heat. Afterwards, an IP camera at the second level
I. INTRODUCTION and an infrared wave confirm the human presence in
disaster-affected areas.
AS a country under the Pacific Ring of Fire,
Philippines is vulnerable to volcanic eruptions and This paper will supplement the previous studies of [5]
earthquakes [1] and is one of the most susceptible to natural relating to the use of temperature, humidity, gas sensors, and
disasters. In the disaster response phase, where there is a a camera. The previous study did not implement these
limited window with a decreasing likelihood of rescuing features, which would have helped rescuers better
trapped individuals, effective planning of search and rescue understand the disaster environment around possible
operations has a significant impact [2]. The ability to search victims. Aside from that, the paper will also fill the gap left
for and locate trapped survivors after an earthquake or the by [6] in their paper, wherein the wheel structure of their
collapse of a built structure is vital. Urban search and rescue rescue robot has a simple design, lightweight and quick but
teams must intervene manually with caution to prevent struggles when faced with obstacles or complex and rough
subsequent collapses that could endanger the rescuers. terrains. To address this, the researchers will use track
Cluttered debris could make it impossible for anybody to get wheels to provide more maneuverability when it comes to
near the victims, and structures must be propped up before rough terrains such as stairs, slopes, and unstructured
human assistance due to the possibility of more landslides ground, which is especially needed in the aftermath of an
[3]. earthquake. Furthermore, this paper will also fill the gap by
IJISRT23JUN777 www.ijisrt.com 985
Volume 8, Issue 6, June – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
[7] related to the usage of BLE and GPS technology to help module provides long-distance wireless communications of
rescuers mark and navigate to the exact location of nearby up to 1000 meters in open space. The study will also explore
possible victims. The previous study did not have any the practicality of these claims and the communication range
positioning system installed and therefore relied heavily on of the module in an interior setting. For the robot to access
thefamiliarity of the rescuers with the area. difficult- to-reach regions in disaster zones, its size must
also be minimal. The study will also exclude the
This study seeks to develop a robot for search and identification of any potential collapses or falling debris
rescue equipped with a camera, temperature, humidity, and within the disaster zone that might hinder the ground robot's
gassensors, as well as BLE and GPS technology. This study function.
aims to
II. REVIEW OF RELATED LITERATURE
Develop a ground vehicle prototype that allows rescuers
to locate victims in real-time using a camera Reference [8] explained the importance of search and
Monitor the temperature, humidity, and presence of rescue robot in search and rescue operations by extend the
gasses in the target area ability of the rescuers to grasp and act in a search and rescue
Build a prototype that can navigate through rough and operation to quickly locate, evaluate, stabilize, and free
complex terrains such as stairs, slopes, and unstructured victimswho cannot be reached easily.
ground
Develop a communication system that will transmit Camera and sensors are crucial components of a search
data from the robot to the user using a wireless and rescue robot. [9] proposed a tracked robot prototype
transceiver module with ESP32-CAM face recognition and video streaming
Control the search and rescue robot using a wireless capabilities using a military robot as the basis of the
controller simulated tracked robot. According to the results, streaming
Provide outdoor positioning via GPS and indoor the video is excellent, which is possible due to the fast
relative positioning using BLE beacons for the connection of the server. [10] developed a sensor network
localization of possible victims. with gas sensor nodes for detecting hazardous substances in
times of disaster. This is done by combining various
This study will aid search and rescue teams in locating inexpensive and power-efficient sensors for gas,
casualties following an earthquake. Furthermore, this study temperature, and humidity with intelligent information
will help reduce the risk for rescuers by providing them with fusion and signal processing, while [11] used a sensor
ambient data such as the vicinity's temperature, humidity, system using three different sensors: a C02 sensor, a
and gas. This study will also help rescuers navigate through microphone, and a thermal camera for human rescue. The
areas that are hard to reach, like tight spaces and cluttered system's performance in living victim detection under debris
debris. Aside from that, since the proposed search and istested in a simulated high-fidelity disaster area.
rescue robot can scout the target area first, the risk of injury
to rescuers would be significantly reduced. The results of this GPS is a useful technology for outdoor localization.
research will provide further knowledge for future research [12] integrated a GPS in a search and rescue drone, [13]
on disaster response. equipped a search and rescue Autonomous Surface Vessel
with a GPS, and [14] developed a fully autonomous UAV
The scope of the study will only focus on developing a with a GPS that pinpoints coordinates of human presence
search and rescue robot that can measure ambient conditions once the drone detects it.
and provide localization of possible victims after an
earthquake. The researchers aim to contribute to search and For indoor relative positioning, BLE is an effective
rescue operations in the aftermath of calamities like technology. [4], [5] both integrated a BLE-based detection
earthquakes, including debris from a building or structure. system in search and rescue robots for the localization of
The proposed system for the robot consists of a Camera, victims in unknown complicated disaster areas. [14]said that
BLE Beacon, GPS, and multiple sensors, including search and rescue robots should be agile and quick. At the
temperature, humidity, and gas sensors. Aside from that, the same time, the robots should be able to manage rough
proposed design also includes using track wheels for the terrains and, if possible, climb stairs if it requires the
ground robot for it to be able to navigate through rough rescuers to access higher levels of the area. [16] compared
terrains such as stairs, slopes, and unstructured ground. The different ground search and rescue robots that used tracked
detection of victims will be manually done by the rescuer, wheels, while [17], [18] designed a search and rescue robot
who is controlling the robot through a live feed via an LCD capable of navigating complex terrains because of its track
screen. Data from the robot, including information gathered wheels.
from the camera and sensors, and data from the rescuers,
including user inputs and controls, shall be exchanged using III. METHODOLOGY
an HC-12 Wireless Transceiver Module with a legal
frequency band of 433.4 MHz to 473.0 MHz. The A. Research Design
researchers selected the module due to its relativelylow cost, Researchers employed a developmental research
networking capability, data security, and considerable approach. Developmental research is the scientific study of
communication distance. Based on its specifications, the creating, producing, and assessing educational programs,
IJISRT23JUN777 www.ijisrt.com 986
Volume 8, Issue 6, June – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
procedures, and products that must fulfill internal microcontroller, this information will be transmitted to the
consistency andeffectiveness requirements [19]. In this case, user side using an HC-12 Wireless Transceiver Module.
the researchers developed a search and rescue robot that can Microcontrollers and wireless transceiver modules will be
navigate through complex terrain, locate victims, and record present on both the robot and user sides. The user will
the temperature, humidity, and presence of gas within the instruct and control the robot by giving it commands after it
disaster area. This research seeks to develop a device that has received the data it has acquired from all the inputs.
will contribute to the search and rescue teams.
The following block design demonstrates how the
B. Design of the System researchers will apply BLE for indoor positioning. The
The system comprises essential components such as rescuer controlling the robot will have visual feedback of the
sensors, a camera, wireless communication modules, user robot's immediate surroundings, enabling them to assess the
controls, and a display. situation and make judgments regarding the presence of a
victim. The user can direct the robot to drop a BLE beacon
in its current location after a victim has been found. The
robot will also offer a wireless communication system to
form a two-way communication between the victim and the
rescuer controlling the search and rescue robot.
D. System Architecture
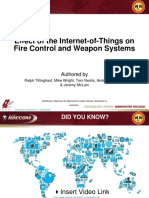
Fig 1 General Block Diagram
Figure 1 shows the system block diagram and its
components: control, sensors and location, the system
microcontroller, and user access and display. The first block
refers to the inputs received and gathered by the robot,
including the temperature, humidity, and gas sensor and the
controls fed to the robot by the user, visual data from the
camera, and location information from indoor and outdoor
positioning using BLE and GPS. These data will
subsequently be stored in the Arduino microcontroller and
sent to the user side using an HC-12 Wireless Transceiver
Module to communicate. The robot and user side will have a
microcontroller and wireless transceiver modules. On the
robot side, the data gathered from all the inputs will be sent
to the user, and in turn, the robot will receive instructions
and control from the user.
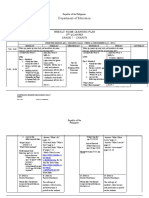
Fig 3 System Architecture
C. Conceptual Framework
As shown in Figure 3, the architecture of the system
consists of two-way communication between two Arduino
Mega microcontrollers, one connected to the search and
rescue robot and the other to the controller and display. The
system uses a total of four HC-12 transceiver modules to
function properly. This is because each HC-12 module only
supports half-duplex communication, meaning it can only
transmit or receive data at any given time. The first pair of
HC12 will transmit controller data from the user to the
robot, and the other pair will transmit sensor data from the
robot to the user. On the robot side, the first HC-12 will
receive the controls from the user, and the second HC-12
will transmit data from the sensors connected to the robot
toward the LCD found on the user side.
Fig 2 Conceptual Framework The search and rescue robot side provides four
functions the user will receive: ESP32 Camera, Sensors,
Figure 2 shows the conceptual framework of the GPS, and BLE. The ESP 32 Camera will serve as the user's
search and rescue robot, in the first diagram includes the eye as the user maneuvers the robot within the area to detect
inputs that the robot receives and gathers, such as the potential victims. The robot is connected to Temperature,
temperature, humidity, and gas sensors, the user-supplied Humidity, and Gas sensors. The sensors will provide users
commands, the visual information from the camera, and the with data and information regarding the ambient conditions
location data from both indoor and outdoor positioning of the area, allowing them to detect any possible fire hazards
utilizing BLE and GPS. Following storage in the Arduino and giving extra precautions to the user. The GPS module
IJISRT23JUN777 www.ijisrt.com 987
Volume 8, Issue 6, June – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
connected to the robot will provide the coordinates of the Figure 6 shows how the user controlled the wheels,
current location of the robot. Additionally, upon victim arms, and BLE dispenser of the robot. For this study, the
detection, the user can drop BLE beacons which will allow researchers used two motor drivers, a VNH2SP30 motor
users to mark the exact position where the user found the driver, and an L298N motor driver, to ensure that the
victim. All data collected from the robot will then be sent to power towards each DC motor connected to the robot is
the HC-12 Module and interpreted with an LCD. maximized. The VNH2SP30 was responsible for the
movement of wheels in the main body of the robot, while
E. Visual Footage System the L298N was dedicated to the forward and backward
movement of the arms. Furthermore, the robot is also
connected to two servo motors, an MG90S micro servo for
dispensing BLE beacons and an MG996R for moving the
arms up and down.
Fig 4 Block Diagram of Visual Footage System H. Wireless Communication System
Figure 4 shows how the researchers used the ESP32
camera for live video feedback. The ESP32 camera hosts a
video-streaming web server that users can access with any
device connected to the same network. The ESP32 Camera
is interfaced and programmed using an Arduino Mega. After
Fig 7 Block Diagram of Wireless Communication System
programming, a link was provided in the serial monitor of
the Arduino IDE, where the user accessed the video from
Figure 7 shows how the researchers used HC12
the camera. The ESP32 Camera only needs to be
Wireless Transceiver Modules to develop a wireless
programmed once, and afterwards, it can be used if its 5V
communication system that transmits data between the robot
and GND pinsare connected to the board.
and the user. There were two Arduino Mega
Microcontrollers, one for the user and the other for the
F. Remote Monitoring System
robot. Since the HC12 Wireless Transceiver Modules are
half-duplex, the researchers used four HC12 Wireless, two
HC12 Transceiver Modules are for transmitting data, while
the other two are for receiving data.
I. Wireless Controller
Fig 5 Block Diagram of Remote Monitoring System
Figure 5 shows the process of monitoring the
temperature, humidity, and gas of the area. The research
Fig 8 Block Diagram of Wireless Controller
mounted the DHT22 Temperature and Humidity Sensor and
MQ-5 Gas Sensor outside the robot. These sensors are
Based on Figure 8, the researchers used a wireless
connected to the Arduino Mega microcontroller connected
controller to control the function of the search and rescue
to the robot. Data gathered from the sensors are then
robot. The wireless controller consists of push buttons for
programmed to be sent by the HC12 module connected to
the search and rescue robot's navigation and arm movement,
the robot toward another HC12 module connected to the
dispensing BLE beacons, and refreshing the sensors and
controller. The gas, temperature, and humidity data
GPS reading.
received by the HC12 module in the controller are then
programmed to be displayed by an LCD connected to the
J. Outdoor Positioning
controller.
G. Robot Mobility
Fig 9 Block Diagram of Outdoor Positioning
Figure 3.14 shows how the outdoor positioning using
NEO6MV2 GPS Module works. The GPS module sends the
coordinates to the Arduino Mega Microcontroller, which is
Fig 6 Block Diagram of Robot Mobility then displayed on the LCD in the controller. The coordinates
are displayed on the LCD, which is then put in Google
Maps to see the actual location of the search and rescue
robot.
IJISRT23JUN777 www.ijisrt.com 988
Volume 8, Issue 6, June – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
K. Indoor Positioning Figure 10 shows how the researchers utilized BLE for
indoor positioning. The user, who controls the robot, sees
the current environment of the robot through the live video
feedback from the ESP32 Camera. Thus, the user will be the
one who will detect if there is the presence of any victim in
the area. Upon detection of the presence of a victim, the user
can instruct the robot to drop a BLE beacon in its current
Fig 10 Block Diagram of Indoor Positioning location, which allows the user to mark the relative position
of the victim. The researcher used NRF Connect Mobile
Application to scan and detect the dropped BLE beacons.
IV. RESULTS AND DISCUSSION
Several testing procedures under different conditions were conducted to evaluate the accuracy and reliability of the search
and rescue robot. All experiments were conducted using the integrated parameters and components of the complete rescue robot.
Live Feed Accuracy Test
Table 1 Pass Rate for Live Feed Accuracy Test
Condition Pass Rate (%)
Well-Ventilated Room 100
Hallway 100
Outdoor (Rough Terrain) 100
Outdoor (Sloped Terrain) 100
The 100% pass rates indicate that every user successfully detected victims in each condition. This implies an important
level of proficiency and effectiveness in detecting victims using the ESP32 camera. The consistency in the pass rates across
different conditions suggests that the user using the ESP32 camera for live feedback was able to determine the victims in each
condition. However, users must carefully navigate the environment to ensure thorough coverage and accurate detection of victims.
Temperature Accuracy Test
Table 2 T-test Table for Temperature Paired two Sample for Means
Parameter Temperaturewith DHT22 sensor Temperaturewith Galaxy Sensor Application
Sample Mean (°C) 29.27 30.12
Variance 1.25 3.00
Degrees of Freedom 38
t-Value -1.83
p-Value 0.07
Using a two-tailed t-test and a significance level of 0.05, the DHT22 temperature sensor used in each of the four conditions
was found to be accurate enough to determine the temperature of the environment.
Humidity Accuracy Assessment
Table 3 T-test Table for Humidity Paired two Sample for Means
Parameter DHT22 Humidity Galaxy Sensor Application Humidity
Sample Mean (%) 75.02 50.39
Variance 8.67 6.16
Observation 20 20
Degrees of Freedom 38
t-Value 28.06
p-Value <0.001
Using a two-tailed t-test and a significance level of 0.05, theDHT22 humidity sensor used in each of the four conditions was
found to be inaccurate enough to determine the humidity of the environment.
IJISRT23JUN777 www.ijisrt.com 989
Volume 8, Issue 6, June – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Gas Sensor Concentration Assessment
Table 4 Pairwise Comparison Table: Turkey HSD Test
Condition Pair Difference in Means TukeyHSD p-value Significant?
Well-ventilated room 3.20 0.763 No
vs. Hallway
Well-ventilated room vs. Outdoor: Rough -32.40 0.001 Yes
Well-ventilated room vs. Outdoor: Sloped -25.40 0.001 Yes
Hallway vs. Outdoor: Rough -35.60 0.001 Yes
Hallway vs. Outdoor: Sloped -28.60 0.001 Yes
Outdoor: Rough vs. Outdoor: Sloped 7.00 0.558 No
The post hoc test results with the Tukey HSD test indicate that the conditions presented significantly affect gas concentration
reading in PPM.
Mobility Test
Table 5 One-sample Proportion Test Table
Conditions Pass rate Z-statistic
Stairs 25 -2.23
Slope 100 4.47
Unstructured Ground 100 4.47
Using a one-sample proportion test, the 100% pass rate for slope and unstructured ground indicates that the search and rescue
robot is capable of navigating slopes and unstructured ground, while the 25% pass rate for stairs suggests that the robot struggles
in navigating stairs or other elevated areas.
Response Time vs. Distance
Table 6 Linear Regression Results
Di stance (m) Response Time (seconds)
Trial 1 Trial 2 Trial 3 Mean
5 0.11 0.15 0.23 0.16
10 0.43 0.55 0.55 0.51
… … … … …
50 3.56 3.00 3.98 3.51
Table 6 shows that in an obstructed condition, there is a delay between the control and the robot that increases as the
distance between them increases. It was also examined using linear regression analysis as shown in Figure 11. This is also the
same for the BLE dispenser response time in an obstructed condition.
GPS Reception Accuracy
Table 7 Coordinates Between GPS Module and Mobile Phone GPS for Indoor Condition
MobilePhone Latitude GPS Module Latitude MobilePhone Longitude GPS Module Longitude
14.636235 NA 121.027593 NA
… … … …
14.636235 NA 121.027593 NA
Since the GPS module failed to receive signals indoors, it is concluded that the NEO6M V2 GPS module has low reception
strength in indoor usage.
Table 8 T-test table for Coordinates
MobilePhone Latitude GPS Module Latitude MobilePhone Longitude GPS Module Longitude
Sample Size (n) 5 5 5 5
Mean 14.63 14.63 121.02 121.02
Longitude 5614 5606 5920 59054
t-value 1.00 - 0.81 -
Degreesof Freedom 8 - 8 -
p-value 0.35 - 0.44 -
IJISRT23JUN777 www.ijisrt.com 990
Volume 8, Issue 6, June – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Showed that the sensor accurately reads gas concentration in different conditions. The robot successfully navigated
through Paired Two Sample for Means the different conditions. The prototype showed an excellent 100% pass rate on slopes
and unstructured ground and an unsatisfactory 25% pass rate on elevated areas. The inclination of the slopes ranged from 7-9
degrees, 19 degrees, and 23 degrees. At the same time, the successful navigation of the robot in an elevated platform has a height
of 2.5cm and 6cm, where the material of the platform also affects its success rate.
The communication between the robot and the control system was also reliable. The response time is proportional to the
distance since the computed R squared is 93.1% and fits the line trend. Hence, the significant relationship between response
time and distance can delay the command of the prototype. Furthermore, the response time on dispensing the At a 5%
significance level, it was determined that no significant difference between the actual coordinates values and the coordinates
values from the GPS module exists. t indicates that the GPS module accurately gathers data compared to the Mobile Phone GPS in
an outdoor setting.
RSS vs Distance of BLE Transmitter from Receiver to Analyze Path-loss (dBm)
Table 9 Results of Measurement of RSS vs Distance of BLE Transmitter from Receiver
Distance (m) RSS in dBm Mean
Sample 1 Sample 2 Sample 3
1 -59 -60 -61 -60.00
2 -65 -67 -62 -64.67
… … … … …
9 -87 -87 -85 -86.33
10 -88 -90 -91 -89.67
With a minimum -70dBm acceptable RSS level for BLE devices, the BLE beacons provided a reliable indoor relative
positioning system.
V. CONCLUSION beacons, results showed that the BLE is an effective tool for
indoor relative positioning.
After conducting several tests under different
conditions, the result shows that the human-controlled search ACKNOWLEDGEMENT
and rescue robot used for victim localization has been able
to accommodate the possible needs of the rescuers in terms The researchers would like to thank Engr. Charles G.
of localizing the victims after an earthquake. The human- Juarizo, Engr. Fernando Victor V. De Vera, Engr. Thaddeo
controlled ground robot for disaster search and rescue S. Garcia, Engr. Eufemia A. Garcia, and Prof. Mark
operations utilized an ESP32 camera to detect victims with Christopher R. Blanco for the opportunity, guidance, and
100% accuracy. Using descriptive statistics, by collecting inspiration provided during this research. They also express
the pass rates for each condition, researchers determined the gratitude to their parents for their love, care, prayers, and
proficiency and effectiveness of the prototype. Subjectively, sacrifices in education. Lastly, researchers acknowledge
users must ensure careful analysis of the provided live God for strength, knowledge, and blessings throughout the
feedback to consider the accurate detection of victims successful completion of the research.
since the prototype will only guide the user in localizing the
victims through the camera. The sensors utilized in the REFERENCES
prototype provided valuable ambient data, which includes
the temperature, humidity, and gas presence in the vicinity. [1] Iuchi, K., & Esnard, A. M. (2008). Earthquake impact
Using a two-tailed two-sampled t-test, researchers mitigation in poor urban areas: The case of
concluded that theDHT22 Temperature and Humidity sensor Metropolitan Manila. Disaster Prevention and
accurately provided ambient data in different environmental Management: An International Journal.
conditions. While for the MQ5 Gas sensor, the one-way [2] Ahmadi, G., Tavakkoli-Moghaddam, R., Baboli, A.,
ANOVA test results BLE was similar to the delay in & Najafi, M. (2020). A decision support model for
commanding the prototype. Increasing the distance also robust allocation and routing of search and rescue
increased the response time of the prototype. Regarding resources after earthquake: a case study. Operational
positioning reliability using the GPS Module, the GPS Research, 1-43.
Module was found to have low signal reception strength in [3] Ventura, R., & Lima, P. U. (2012). Search and rescue
an indoor setting but is reliable in an outdoor setting. robots: The civil protection teams of the future. In
Various factors affect the signal the GPS receives when 2012 Third International Conference on Emerging
trying to reach a receiver indoors. Structures like buildings, Security Technologies (pp. 12-19). IEEE.
walls, and roofs can attenuate the signals, leading to [4] Hashmi, A. (2021). A Novel Drone-based Search and
decreased reception strength and degraded accuracy. While Rescue System using Bluetooth Low Energy
for indoor relative positioning, using BLE beacons and NRF Technology. Engineering, Technology &Amp;
Connect mobile application to obtain the RSS of the Applied Science Research, 11(2), 7018-7022.
IJISRT23JUN777 www.ijisrt.com 991
Volume 8, Issue 6, June – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
[5] Cantizani-Estepa, J., Bravo-Arrabal, J., Fernandez- [16] Shah, B. & Choset, H. (2004). Survey on Urban
Lozano, J., Fortes, S., Barco, R., Garcia-Cerezo, A., & Search and Rescue Robots, Journal of the Robotics
Mandow, A. (2022). Bluetooth Low Energy for Society of Japan, Vol.22, No.5, p.1824.
Close Detection in Search and Rescue Missions [17] Marques, C., Cristóvão, J., Alvito, P., Lima, P.,
With Robotic Platforms: An Experimental Frazão, J., Ribeiro, I., & Ventura, R. (2007). A search
Evaluation. IEEE Access, 10, 106169-106179. and rescue robot with Tele‐operated Tether Docking
[6] Xin, C., Qiao, D., Hongjie, S., Chunhe, L., & System. Industrial Robot: An International Journal,
Haikuan, Z. (2018). Design and implementation of 34(4), 332– 338.
debris search and rescue robot system based on [18] Moosavian, S., Semsarilar, H., & Kalantari, A.
internet of things. In 2018 International Conference (2006). Design and manufacturing of a Mobile
on Smart Grid and Electrical Automation (ICSGEA) Rescue Robot. 2006 IEEE/RSJ International
(pp. 303-307). IEEE. Conference on Intelligent Robots and Systems
[7] Uddin, Z., & Islam, M. (2016). Search and rescue [19] Seels, B.B., & Richey, R.C. (1994). Instructional
system for alive human detection by semi- technology: The definition and domains of the field.
autonomous mobile rescue robot. In 2016 Washington, DC: Association for Educational
international conference on innovations in science, Communications and Technology.
engineering, and technology (ICISET) (pp. 1-5).
IEEE.
[8] Murphy, R., Tadokoro, S., Nardi, D., Jacoff, A.,
Fiorini, P., Choset, H., & Erkmen, A. (2008). Search
and Rescue Robotics. Springer Handbook Of
Robotics, 1151-1173.
[9] Gumar, H. A., Albaker, B. M., & Al-Turfi, M. N.
(2022). Unmanned Ground Vehicle Prototype
Development for Search Evacuation and Defense
Based on IoRT. In Micro-Electronics and
Telecommunication Engineering (pp. 415-423).
Springer, Singapore.
[10] Rademacher, S., Schmitt, K., Mengers, M., &
Wöllenstein, J. (2015). Sensor network with energy
efficient and low-cost gas sensor nodes for the
detection of hazardous substances in the event of a
disaster. In 2015 IEEE Topical Conference on
Wireless Sensors and Sensor Networks (WiSNet) (pp.
59-61). IEEE.
[11] Zhang, D., Sessa, S., Kasai, R., Cosentino, S.,
Giacomo, C., Mochida, Y., Yamada, H., Guarnieri,
M., & Takanishi, A. (2018). Evaluation of a Sensor
System for Detecting Humans Trapped under Rubble:
A Pilot Study. Sensors (Basel, Switzerland), 18(3),
852.
[12] McRae, J., Gay, C., Nielsen, B., & Hunt, A. (2019).
Using an Unmanned Aircraft System (Drone) to
Conduct a Complex High-Altitude Search and Rescue
Operation: A Case Study. Wilderness &Amp;
Environmental Medicine, 30(3), 287-290.
[13] Mansor, H., Norhisam, M., Zainal Abidin, Z., &
Gunawan, T. (2021). Autonomous surface vessel for
search and rescue operation. Bulletin Of Electrical
Engineering And Informatics, 10(3), 1701-1708.
[14] Valsan, A., B., P., G. H., V., Unnikrishnan, R.,
Reddy, P., & A., V. (2020). Unmanned Aerial
Vehicle for Search and Rescue Mission. 2020 4Th
International Conference On Trends In Electronics
And Informatics (ICOEI)(48184).
[15] Eich, M., Grimminger, F., & Kirchner, F. (2008). A
versatile stair- climbing robot for search and rescue
applications. 2008 IEEE International Workshop on
Safety, Security and Rescue Robotics.
IJISRT23JUN777 www.ijisrt.com 992
You might also like
- Analytical Techniques for Thin Films: Treatise on Materials Science and Technology, Vol. 27From EverandAnalytical Techniques for Thin Films: Treatise on Materials Science and Technology, Vol. 27K. N. TuNo ratings yet
- YoloV4 Based Object Detection For Blind StickDocument5 pagesYoloV4 Based Object Detection For Blind StickInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Luggage SystemDocument8 pagesSmart Luggage SystemIJRASETPublicationsNo ratings yet
- Track Baggage using IoTDocument3 pagesTrack Baggage using IoTMohammed Abdur Rahman50% (2)
- Communication Theory of Secrecy Systems PDFDocument2 pagesCommunication Theory of Secrecy Systems PDFCasaundraNo ratings yet
- Different Approaches To Crack Monitoring of Buildings Using IOTDocument11 pagesDifferent Approaches To Crack Monitoring of Buildings Using IOTIJRASETPublicationsNo ratings yet
- Wireless Sensor Node To Detect Dangerous Gas Pipeline Abstract NewDocument6 pagesWireless Sensor Node To Detect Dangerous Gas Pipeline Abstract NewsravanthiNo ratings yet
- Improved Pedestrian Navigation Based On Drift-Reduced MEMS IMU ChipDocument10 pagesImproved Pedestrian Navigation Based On Drift-Reduced MEMS IMU ChipluisfernandesNo ratings yet
- RFID Chip Implants: An Ethical DebateDocument44 pagesRFID Chip Implants: An Ethical Debatedarkfalz1No ratings yet
- Border Security Using Wireless Integrated Network Sensors (WINS)Document18 pagesBorder Security Using Wireless Integrated Network Sensors (WINS)Pradeep CheekatlaNo ratings yet
- Object Detection With Voice Guidance To Assist Visually Impaired Using Yolov7Document7 pagesObject Detection With Voice Guidance To Assist Visually Impaired Using Yolov7IJRASETPublicationsNo ratings yet
- Biochip TechnologyDocument7 pagesBiochip Technologyrishabh singhNo ratings yet
- Paper 9004Document4 pagesPaper 9004IJARSCT JournalNo ratings yet
- Implementation of An IOT Based Animal Care System ReportDocument25 pagesImplementation of An IOT Based Animal Care System ReportAkshay bypNo ratings yet
- Quantum Cryptography:: Information Protection For The Quantum AgeDocument15 pagesQuantum Cryptography:: Information Protection For The Quantum Ageamitom_pandey4974No ratings yet
- Effect of The Internet-Of-Things On Fire Control and Weapon SystemsDocument20 pagesEffect of The Internet-Of-Things On Fire Control and Weapon SystemsMimidbe BibiNo ratings yet
- Blind Navigation Using RFID For Indoor EnvironmentDocument15 pagesBlind Navigation Using RFID For Indoor EnvironmentTruptiiiiNo ratings yet
- ECE 5th Sem SyllabusDocument84 pagesECE 5th Sem SyllabusankurwidguitarNo ratings yet
- Drones: A Comprehensive Review of Applications of Drone Technology in The Mining IndustryDocument25 pagesDrones: A Comprehensive Review of Applications of Drone Technology in The Mining IndustryDonelNo ratings yet
- Ec2045 Satellite CommunicationDocument2 pagesEc2045 Satellite CommunicationTHIRUNEELAKANDANNo ratings yet
- Make 23: Mosquito BlasterDocument7 pagesMake 23: Mosquito BlasterNick Vu0% (1)
- A Review Advancement of Security Alarm System Using Internet of Things (Iot)Document13 pagesA Review Advancement of Security Alarm System Using Internet of Things (Iot)AppyNo ratings yet
- Exploring Trace Transform For Robust Human Action Recognition - G. Goudelis2013Document11 pagesExploring Trace Transform For Robust Human Action Recognition - G. Goudelis2013Dom DeSiciliaNo ratings yet
- VR Based Tele-Presence Robot Using Raspberry PiDocument6 pagesVR Based Tele-Presence Robot Using Raspberry PiIJRASETPublicationsNo ratings yet
- Security Alarm Using Ardiuno and SensorDocument20 pagesSecurity Alarm Using Ardiuno and SensorShashank KundenaNo ratings yet
- Project LoonDocument22 pagesProject LoonPrashanth SNo ratings yet
- Recommendation of Crop, Fertilizers and Crop Disease Detection SystemDocument6 pagesRecommendation of Crop, Fertilizers and Crop Disease Detection SystemIJRASETPublicationsNo ratings yet
- A Comprehensive Study of Camouflaged Object Detection Using Deep LearningDocument8 pagesA Comprehensive Study of Camouflaged Object Detection Using Deep LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Tesis Con DFT y TD-DFTDocument171 pagesTesis Con DFT y TD-DFTFredy OnateNo ratings yet
- MIT Technology Review Mar 2024Document92 pagesMIT Technology Review Mar 2024Vinod SrinivasaNo ratings yet
- BAN Body Area Antenna PresentationDocument21 pagesBAN Body Area Antenna PresentationYingying Chok100% (1)
- Aerospace America - December 2010 (True PDFDocument120 pagesAerospace America - December 2010 (True PDFammarov123No ratings yet
- Potholes and Humps Detection For Vehicle SafetyDocument4 pagesPotholes and Humps Detection For Vehicle SafetyEditor IJTSRDNo ratings yet
- Unit 1.living in A DigitalAge564854459 PDFDocument23 pagesUnit 1.living in A DigitalAge564854459 PDFVlas AnaNo ratings yet
- Seminar Report PDFDocument31 pagesSeminar Report PDFAsmita Gautam0% (2)
- Papadopoulos: Vera - Ai Overview 21 9 2022Document14 pagesPapadopoulos: Vera - Ai Overview 21 9 2022veraai100% (1)
- Project UMOJA AR/VR Gaming Framework: AR Game Development Wearable Accelerometer Prototype (x3) Marketing and PR FundingDocument1 pageProject UMOJA AR/VR Gaming Framework: AR Game Development Wearable Accelerometer Prototype (x3) Marketing and PR FundingAston WalkerNo ratings yet
- Cellonics DocumentDocument19 pagesCellonics Documentsananda4u100% (1)
- Micro Electronic: Presented By: Nayan DixitDocument22 pagesMicro Electronic: Presented By: Nayan DixitnayanNo ratings yet
- Review On Camera Based Surveillance SystemsDocument5 pagesReview On Camera Based Surveillance SystemsIJRASETPublicationsNo ratings yet
- WBANDocument9 pagesWBANCristianENo ratings yet
- Risat I:: OrbitDocument35 pagesRisat I:: OrbitNirmalrahul_1990No ratings yet
- Action Recognition From Video UsingDocument16 pagesAction Recognition From Video UsingManju YcNo ratings yet
- Design and Construction of Earthquake de PDFDocument8 pagesDesign and Construction of Earthquake de PDFHermanRomanNo ratings yet
- PALABOS 3D Boltzmann Method For Fluid Flow Modeling Porous RocksDocument208 pagesPALABOS 3D Boltzmann Method For Fluid Flow Modeling Porous RocksSofian SalmaniNo ratings yet
- Pir Motion Sensor Using Arduino UnoDocument5 pagesPir Motion Sensor Using Arduino Unoakashlogic100% (1)
- Pdfeetesep 2015Document70 pagesPdfeetesep 2015mikadahlNo ratings yet
- Underwater Wireless Sensor Networks: Applications, Challenges and Design Issues of The Network LayerDocument7 pagesUnderwater Wireless Sensor Networks: Applications, Challenges and Design Issues of The Network LayerWARSE JournalsNo ratings yet
- Thaens - NATO Cooperative ESM OperationsDocument11 pagesThaens - NATO Cooperative ESM OperationsMartin Schweighart MoyaNo ratings yet
- Detecting Fake Images Using Demosaicing AlgorithmsDocument5 pagesDetecting Fake Images Using Demosaicing AlgorithmsShaletXavierNo ratings yet
- Bio Molecular Computing: C C C CDocument11 pagesBio Molecular Computing: C C C CSpandana ReddyNo ratings yet
- STRATELLITESDocument25 pagesSTRATELLITESgec eceNo ratings yet
- A Comparative Study On LIDAR and Ultrasonic Sensor For Obstacle Avoidance Robot CarDocument6 pagesA Comparative Study On LIDAR and Ultrasonic Sensor For Obstacle Avoidance Robot Carachinto tonmoyNo ratings yet
- Visually Impaired People Monitoring in A Smart Home Using Electronic White CaneDocument10 pagesVisually Impaired People Monitoring in A Smart Home Using Electronic White CaneAnonymous Gl4IRRjzNNo ratings yet
- AMEBA DARPA-SN-17-12 ProposersDay For Posting 16dec2016Document4 pagesAMEBA DARPA-SN-17-12 ProposersDay For Posting 16dec2016Steve AbonyiNo ratings yet
- Wireless Vision Technology: Dept of ECE, BITS, AdoniDocument19 pagesWireless Vision Technology: Dept of ECE, BITS, Adoniwasim.No ratings yet
- East West Institute of Technology: An Improved Approach For Fire Detection Using Deep Learning ModelsDocument21 pagesEast West Institute of Technology: An Improved Approach For Fire Detection Using Deep Learning ModelsDeepuNo ratings yet
- Tim Girard Resume 8 2013Document3 pagesTim Girard Resume 8 2013sundar_subash25No ratings yet
- FinalDocument7 pagesFinalgeorgemlernerNo ratings yet
- SIM HUMaLaOR2Document17 pagesSIM HUMaLaOR2Avishek ChakrabortyNo ratings yet
- Parastomal Hernia: A Case Report, Repaired by Modified Laparascopic Sugarbaker TechniqueDocument2 pagesParastomal Hernia: A Case Report, Repaired by Modified Laparascopic Sugarbaker TechniqueInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Health Care SystemDocument8 pagesSmart Health Care SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Visual Water: An Integration of App and Web to Understand Chemical ElementsDocument5 pagesVisual Water: An Integration of App and Web to Understand Chemical ElementsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Air Quality Index Prediction using Bi-LSTMDocument8 pagesAir Quality Index Prediction using Bi-LSTMInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Cities: Boosting Economic Growth through Innovation and EfficiencyDocument19 pagesSmart Cities: Boosting Economic Growth through Innovation and EfficiencyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Parkinson’s Detection Using Voice Features and Spiral DrawingsDocument5 pagesParkinson’s Detection Using Voice Features and Spiral DrawingsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Predict the Heart Attack Possibilities Using Machine LearningDocument2 pagesPredict the Heart Attack Possibilities Using Machine LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Impact of Silver Nanoparticles Infused in Blood in a Stenosed Artery under the Effect of Magnetic Field Imp. of Silver Nano. Inf. in Blood in a Sten. Art. Under the Eff. of Mag. FieldDocument6 pagesImpact of Silver Nanoparticles Infused in Blood in a Stenosed Artery under the Effect of Magnetic Field Imp. of Silver Nano. Inf. in Blood in a Sten. Art. Under the Eff. of Mag. FieldInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- An Analysis on Mental Health Issues among IndividualsDocument6 pagesAn Analysis on Mental Health Issues among IndividualsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Compact and Wearable Ventilator System for Enhanced Patient CareDocument4 pagesCompact and Wearable Ventilator System for Enhanced Patient CareInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Implications of Adnexal Invasions in Primary Extramammary Paget’s Disease: A Systematic ReviewDocument6 pagesImplications of Adnexal Invasions in Primary Extramammary Paget’s Disease: A Systematic ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Terracing as an Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains- CameroonDocument14 pagesTerracing as an Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains- CameroonInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Exploring the Molecular Docking Interactions between the Polyherbal Formulation Ibadhychooranam and Human Aldose Reductase Enzyme as a Novel Approach for Investigating its Potential Efficacy in Management of CataractDocument7 pagesExploring the Molecular Docking Interactions between the Polyherbal Formulation Ibadhychooranam and Human Aldose Reductase Enzyme as a Novel Approach for Investigating its Potential Efficacy in Management of CataractInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Insights into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesDocument8 pagesInsights into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Harnessing Open Innovation for Translating Global Languages into Indian LanuagesDocument7 pagesHarnessing Open Innovation for Translating Global Languages into Indian LanuagesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Relationship between Teacher Reflective Practice and Students Engagement in the Public Elementary SchoolDocument31 pagesThe Relationship between Teacher Reflective Practice and Students Engagement in the Public Elementary SchoolInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Investigating Factors Influencing Employee Absenteeism: A Case Study of Secondary Schools in MuscatDocument16 pagesInvestigating Factors Influencing Employee Absenteeism: A Case Study of Secondary Schools in MuscatInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Dense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)Document2 pagesDense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Diabetic Retinopathy Stage Detection Using CNN and Inception V3Document9 pagesDiabetic Retinopathy Stage Detection Using CNN and Inception V3International Journal of Innovative Science and Research TechnologyNo ratings yet
- Advancing Healthcare Predictions: Harnessing Machine Learning for Accurate Health Index PrognosisDocument8 pagesAdvancing Healthcare Predictions: Harnessing Machine Learning for Accurate Health Index PrognosisInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Auto Encoder Driven Hybrid Pipelines for Image Deblurring using NAFNETDocument6 pagesAuto Encoder Driven Hybrid Pipelines for Image Deblurring using NAFNETInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Formulation and Evaluation of Poly Herbal Body ScrubDocument6 pagesFormulation and Evaluation of Poly Herbal Body ScrubInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Utilization of Date Palm (Phoenix dactylifera) Leaf Fiber as a Main Component in Making an Improvised Water FilterDocument11 pagesThe Utilization of Date Palm (Phoenix dactylifera) Leaf Fiber as a Main Component in Making an Improvised Water FilterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Making of Object Recognition Eyeglasses for the Visually Impaired using Image AIDocument6 pagesThe Making of Object Recognition Eyeglasses for the Visually Impaired using Image AIInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of Digital Marketing Dimensions on Customer SatisfactionDocument6 pagesThe Impact of Digital Marketing Dimensions on Customer SatisfactionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Electro-Optics Properties of Intact Cocoa Beans based on Near Infrared TechnologyDocument7 pagesElectro-Optics Properties of Intact Cocoa Beans based on Near Infrared TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Survey of the Plastic Waste used in Paving BlocksDocument4 pagesA Survey of the Plastic Waste used in Paving BlocksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Cyberbullying: Legal and Ethical Implications, Challenges and Opportunities for Policy DevelopmentDocument7 pagesCyberbullying: Legal and Ethical Implications, Challenges and Opportunities for Policy DevelopmentInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Comparatively Design and Analyze Elevated Rectangular Water Reservoir with and without Bracing for Different Stagging HeightDocument4 pagesComparatively Design and Analyze Elevated Rectangular Water Reservoir with and without Bracing for Different Stagging HeightInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design, Development and Evaluation of Methi-Shikakai Herbal ShampooDocument8 pagesDesign, Development and Evaluation of Methi-Shikakai Herbal ShampooInternational Journal of Innovative Science and Research Technology100% (3)
- S322 06 S Operations Advanced Configuration Backup Restore RevB PDFDocument27 pagesS322 06 S Operations Advanced Configuration Backup Restore RevB PDFRizky MuhammadNo ratings yet
- Joinson 2008Document10 pagesJoinson 2008PaulShapiroNo ratings yet
- MIND Seamap GunLink 2500Document4 pagesMIND Seamap GunLink 2500Steve HeartNo ratings yet
- Performance Indicator - Physics 2Document7 pagesPerformance Indicator - Physics 2lim chuan yangNo ratings yet
- EMT Electromagnetic Theory MODULE IDocument197 pagesEMT Electromagnetic Theory MODULE ItearsomeNo ratings yet
- Electric Motor Troubleshooting PolyphaseDocument16 pagesElectric Motor Troubleshooting PolyphaserpshvjuNo ratings yet
- Design of Gravity Dam by Genetic Algorithms: Farzin SalmasiDocument6 pagesDesign of Gravity Dam by Genetic Algorithms: Farzin SalmasiNishant SarrafNo ratings yet
- The Z Notation:: A Reference ManualDocument33 pagesThe Z Notation:: A Reference ManualSiti AisyahNo ratings yet
- Grados: Rad Ia Ne SDocument4 pagesGrados: Rad Ia Ne SJean Pierre AHNo ratings yet
- Refrigerated Air Dryers: CatalogueDocument6 pagesRefrigerated Air Dryers: CataloguemejmakNo ratings yet
- Spyn Audio Catalog-1589913182Document28 pagesSpyn Audio Catalog-1589913182Jose Gregorio Ortega CarrilloNo ratings yet
- Poisson Distributions - Definition, Formula & ExamplesDocument10 pagesPoisson Distributions - Definition, Formula & ExamplesQurban khaton HussainyarNo ratings yet
- Design and Fabrication ofDocument9 pagesDesign and Fabrication ofKarthi Keyan R KNo ratings yet
- CM4-1 - (Newtons Laws)Document38 pagesCM4-1 - (Newtons Laws)Joseph TabulinaNo ratings yet
- EPIDEMIOLOGICAL STUDIES Final (1) 1Document41 pagesEPIDEMIOLOGICAL STUDIES Final (1) 1Tooba Nadeem100% (1)
- Linear Algebra ReviewDocument13 pagesLinear Algebra ReviewYoumna ShatilaNo ratings yet
- Philippine Department of Education Home Learning Plan for Grade 7Document13 pagesPhilippine Department of Education Home Learning Plan for Grade 7Charlene AtienzaNo ratings yet
- Examining Demand and Substitutability Across Terminals in A Gateway Port Network A Discrete Choice Model of Irish Ports PDFDocument11 pagesExamining Demand and Substitutability Across Terminals in A Gateway Port Network A Discrete Choice Model of Irish Ports PDFJCANo ratings yet
- Lesson 10Document12 pagesLesson 10Alan ZhouNo ratings yet
- Build a better future with Hyundai's powerful and reliable excavatorsDocument10 pagesBuild a better future with Hyundai's powerful and reliable excavatorsA2 BUDNo ratings yet
- Optimize tempdb performance with best practicesDocument10 pagesOptimize tempdb performance with best practicesSubhro SahaNo ratings yet
- Acoustic Pulsations in Reciprocating Machinery PDFDocument2 pagesAcoustic Pulsations in Reciprocating Machinery PDFEdward JulianNo ratings yet
- Introduction To Software ModulesDocument3 pagesIntroduction To Software ModulesArif SamoNo ratings yet
- Multix PowerDocument68 pagesMultix PowerTessa HernandezNo ratings yet
- Asme Section IX - NewDocument70 pagesAsme Section IX - NewAnaswarps100% (2)
- Per Unit System Explaination - With Solved ExampleDocument13 pagesPer Unit System Explaination - With Solved ExampleAnimesh Verma90% (68)
- Veins and Hydrothermal Deposits - HTMLDocument4 pagesVeins and Hydrothermal Deposits - HTMLMohd Syakir100% (1)
- Cer Alum Ladder Tray CatalogDocument37 pagesCer Alum Ladder Tray Catalogmashan98No ratings yet
- Carbon and Its CompoundDocument6 pagesCarbon and Its CompoundKartik meenaNo ratings yet
- Air Compressor Capacity and Air Reciever SizingDocument3 pagesAir Compressor Capacity and Air Reciever SizingHasmukh DaveNo ratings yet