Professional Documents
Culture Documents
Challenges in Design of Foundations For WT
Challenges in Design of Foundations For WT
Uploaded by
Jen HuangOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Challenges in Design of Foundations For WT
Challenges in Design of Foundations For WT
Uploaded by
Jen HuangCopyright:
Available Formats
Page 1 of 11 Engineering & Technology Reference
Challenges in design of foundations for Offshore Wind
Turbines
In
vi
Professor Subhamoy Bhattacharya
te
d
Chair in Geomechanics, University of Surrey
ar
tic
Designing foundations for Offshore Wind Turbines (OWTs) are challenging as these are dynamically
le
sensitive structures in the sense that natural frequencies of these structures are very close to the
fo
forcing frequencies of the wind, wave and 1P (rotor frequency) and 2P/3P (blade shadowing
rt
frequency) loading. Typically for the widely used soft-stiff design (target frequency of the overall wind
he
turbine is between 1P and 2P/3P), the ratio of forcing frequency to natural frequency is very close to
In
1 and as a result is prone to dynamic amplification of responses such as deflection/rotation which
st
may enhance the fatigue damage, thereby reducing the intended design life. Therefore, a designer
itu
apart from accurately predicting the natural frequency of the structure, must also ensure that the
tio
overall natural frequency due to dynamic-soil-structure-interaction does not shift towards the forcing
n
frequencies making the value of / even closer to 1. Therefore foundations are one of critical
of
components of Offshore Wind Turbines not only because of the overall stability of the structure but
En
also due to financial viability of the project. The article highlights technical challenges associated
gi
with foundation design for offshore Wind farm.
ne
er
1.0 Importance of foundation design
in
g
an
Foundation selection plays an important role in the overall concept design for offshore wind farms
as there are large financial implications attached to the choices made. Typically, foundations costs
d
Te
25 to 34% of the overall costs. For the North Hoyle project the cost of foundation was 34%, Carter
(2007) and it has been reported that development of Atlantic Array wind farm did not go ahead and
ch
one of the main reason is the expensive foundation. Foundations for wind turbines can be classified
no
into two main types: fixed (or grounded to the seabed) and floating. While most of the currently
lo
installed or operating turbines are supported on fixed/grounded foundation system, research and
gy
development of floating foundations are underway. Figure 1 shows the different types of grounded
(IE
system (fixed to the seabed) foundation system either in use or proposed and will constitute the
T)
main part of this article.
:W
ill
ap
pe
ar
in
ht
tp
://
w
w
w
.th
Figure 1: Figure showing different types of foundations
ei
e
2.0 Types and nature of the loads acting on the foundations
t.o
Offshore wind turbines, due to their shape and form (i.e. a long slender column with a heavy mass as
rg
well as a rotating mass at the top) are dynamically sensitive because the natural frequency of these
/
slender structures are very close to the excitation frequencies imposed by the environmental and
IET Review Copy Only
Engineering & Technology Reference Page 2 of 11
mechanical loads. Figure 2 shows a simple mechanical model of the whole system showing the
different components and the design variables. In the model, the foundation is replaced by 4
springs: KL (lateral spring), KR (Rocking spring), KV (Vertical spring) and KLR (Cross-coupling spring). It is
In
therefore clear that the stability and deformation of the system is very much dependent on these 4
vi
springs. Few things may be noted regarding these springs:
te
(a) The properties and shape of the springs (load-deformation characteristics) should be such that
d
ar
the whole structure should not collapse under the action of extreme loads and the deformation is
tic
acceptable under the working loads;
le
(b) The values of the spring (stiffness of the foundation) is necessary to compute the natural period
fo
of the whole structure as this is linear Eigen value analysis. Further details on the analysis required
rt
can be found in Adhikari and Bhattacharya (2012), Bhattacharya and Adhikari(2011).
he
(c) The values of the springs will also dictate the overall dynamic stability of the system due to its
non-linear nature. It must be mentioned that these springs are not only frequency dependent but
In
st
also change with cycles of loading due to dynamic soil structure interaction. Further details on the
itu
dynamic interaction can be found in Bhattacharya et al (2013a, 2013b).
tio
n
of
En
gi
ne
er
in
g
an
d
Te
ch
no
lo
gy
(IE
T)
:W
ill
ap
pe
Figure 2: Simplified mechanical model of an offshore wind turbine
ar
i n
2.1 Loads acting on the foundations
ht
tp
The loads acting on the wind turbine tower are ultimately transferred to the foundation and can be
://
classified into two types: static or dead load due to the selfweight of the components and the
w
w
dynamic loads (or it some instances this can be cyclic). However, the challenging part is the dynamic
w
loads acting on the wind turbine and are discussed below:
.th
(a) The lateral load acting at the hub level (top of the tower) from the rotating blades produced by
ei
the turbulence in the wind. The magnitude of dynamic component depends on the turbulent wind
et.o
speed;
rg
(b) The load caused by waves crashing against the substructure very close to the foundation. The
/
magnitude of this load depends on the wave height and wave period;
IET Review Copy Only
Page 3 of 11 Engineering & Technology Reference
(c) The load caused by the vibration at the hub level due to the mass and aerodynamic imbalances of
the rotor. This load has a frequency equal to the rotational frequency of the rotor (referred to as
1P loading in the literature). Since most of the industrial wind turbines are variable speed machines,
In
1P is not a single frequency but a frequency band between the frequencies associated with the
vi
lowest and the highest rpm (revolutions per minute);
te
(d) Loads in the tower due to the vibrations caused by blade shadowing effects (referred to as 2P/3P
d
ar
in the literature). The blades of the wind turbine passing in front of the tower cause a shadowing
tic
effect and produce a loss of wind load on the tower and is shown in Figure 3. This is a dynamic load
le
having frequency equal to three times the rotational frequency of the turbine (3P) for three bladed
fo
wind turbines and two times (2P) the rotational frequency of the turbine for a two bladed turbine.
rt
The 2P/3P loading is also a frequency band like 1P and is simply obtained by multiplying the limits of
he
the 1P band by the number of the turbine blades.
In
st
itu
tio
n
of
En
gi
ne
er
in
g
an
d
Te
ch
Figure 3: Blade shadowing load on the tower (3P load). Left hand diagram shows the load on the
no
load on the tower when the blades does not shadow the tower.
lo
gy
The turbulent wind velocity and the wave height on sea are both variables and are best treated
(IE
statistically using Power Spectral Density (PSD) functions. In other words, instead of time domain
T)
analysis the produced loads are more effectively analysed in the frequency domain whereby the
:W
contribution of each frequency to the total power in wind turbulence and in ocean waves is
described. Representative wave and wind (turbulence) spectra can be constructed by a Discrete
ill
Fourier Transform from site specific data. However, in absence of such data, theoretical spectra can
ap
also be used. The DNV standard specifies the Kaimal spectrum for wind and the JONSWAP (Joint
pe
North Sea Wave Project) spectrum for waves in offshore wind turbine applications.
ar
i n
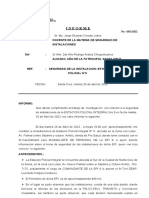
Figure 4 shows the main frequencies for a three-bladed National Renewable Energy Laboratory
ht
(NREL) standard 5MW wind turbine with an operational interval of 6.9 to 12.1 rpm. The rotor
tp
frequency (often termed 1P) lies in the range 0.115-0.2Hz and the corresponding ‘blade passing
://
frequency’ for a three-bladed turbine lies in the range 0.345-0.6Hz. The figure also shows typical
w
w
frequency distributions for wind and wave loading. The peak frequency of typical North Sea offshore
w
waves is about 0.1Hz.
.th
ei
e
t.o
rg
/
IET Review Copy Only
Engineering & Technology Reference Page 4 of 11
In
vi
te
d
ar
tic
le
fo
rt
he
In
st
itu
tio
n
of
Figure 4: Frequency spectrum of the dynamic loads showing design choices
En
gi
2.2 Design options
ne
er
It is clear from the frequency content of the applied loads (see Figure 4) that the designer has to
in
g
select a system frequency (the global frequency of the overall wind turbine including the foundation)
an
which lies outside these frequencies to avoid resonance and ultimately increased fatigue damage.
d
From the point of view of first natural frequency (fo) of the structure, three types of designs are
Te
possible (see Figure 4):
ch
(1) Soft-Soft design where f0 is placed below the 1P frequency range which is a very flexible
no
structure and almost impossible to design for a grounded system.
lo
(2) Soft-Stiff design where f0 is between 1P and 3P frequency ranges and this is the most
gy
common in the current offshore development.
(IE
(3) Stiff-Stiff designs where f0 have a higher natural frequency than the upper limit of the 3P
T)
band which will need a very stiff support structure.
:W
It is of interest to review to codes of practice in this regard. DNV code suggests that first natural
ill
frequency should not be within 10% of the 1P and 3P ranges as indicated in Figure 4. It is apparent
ap
from Figure 4 that for soft-stiff design, the first natural frequency of the wind turbine needs to be
pe
fitted in a very narrow band (in some cases the 1P and 3P ranges may even coincide leaving no gap).
ar
in
Few points to be noted:
ht
tp
(1) From the point of view of dynamics, OWT designs are only conservative if the prediction of the
://
first natural frequency is accurate. Unlike in the case of some other offshore structures (such as the
w
w
ones used in the oil and gas industry), under-prediction of f0 is unconservative.
w
(2) The safest solution would seem to be placing the natural frequency of the wind turbine well
.th
above the 3P range. However, stiffer designs with higher natural frequency require massive support
ei
structures and foundations involving higher costs of materials, transportation and installation. Thus
et.o
from an economic point of view, softer structures are desirable and it is not surprising that almost all
of the installed wind turbines are "soft-stiff" designs and this type is expected to be used in the
rg
/
future as well.
IET Review Copy Only
Page 5 of 11 Engineering & Technology Reference
(3) It is clear from the above discussion that designing soft-stiff wind turbine systems demands the
consideration of dynamic amplification and also any potential change in system frequency due to the
effects of cyclic/dynamic loading on the system i.e. Dynamic-Structure-Foundation-Soil-Interaction.
In
Typically the first modal frequency of the wind turbine system lies in the range of 75% to 120% of
vi
the excitation frequencies and as a result, dynamic amplifications of responses are expected.
te
(4) Clearly, for soft-stiff design, any change in natural frequency over the design/operation period of
d
ar
the turbine will enhance the dynamic amplifications which will increase the vibration amplitudes and
tic
thus the stresses and fatigue damage on the structure. Therefore fatigue is one of the design drivers
le
for these structures. Predicting fatigue damage is undoubtedly a formidable task due to complexity
fo
associated with the uncertainty in the dynamic amplification (owing to changes in system
rt
characteristics over time and number of cycles), randomness of the environmental loading and last
he
but not the least, the impact of climate change.
In
st
3.0 Design considerations for foundations
itu
tio
One of the main aims of the foundations is to transfer all the loads from the wind turbine structure
n
to the ground within the allowable deformations. Guided by Limit State Design philosophy, the
of
design considerations are to satisfy:
En
1. Ultimate Limit State (ULS): This would require the computation of capacity of the
gi
foundation. For monopiles types of foundation, this would require computation of ultimate
ne
moment, lateral and axial load carrying capacity.
er
2. Serviceability Limit State (SLS): This would require the prediction of tilt at the hub level over
in
the life time of the wind turbine.
g
3. Fatigue Limit State (FLS): This would require predicting the fatigue life.
an
4. Robustness and ease of installation: Can the foundation be installed and are there adequate
d
redundancy in the system?
Te
ch
3.1 A note on SLS design criteria
no
Serviceability criteria will be defined based on the tolerance requirements for the operation of
lo
gy
the wind turbine and is often described as "turbine manufacturer requirements". Ideally, these
should be turbine specific i.e. size and the hub height, gear boxed or direct drive. Typically, these
(IE
tolerances are specified in some codes of practice (eg DnV) or a design specification supplied by
T)
the client which may be dictated by the turbine manufacturer. Some of the specific
:W
requirements are:
ill
(a) Maximum allowable rotation at pile head after installation. DnV code specifies 0.25 degree
ap
limit on "Tilt" at the nacelle level.
pe
ar
(b) Maximum accumulated permanent rotation resulting from cyclic and dynamic loading over
in
the design life.
ht
tp
An example methodology to predict the foundation stiffness required.
://
w
For Walney farm (in the Irish Sea having Siemens SWT-3.6-10 type turbine having an operating
w
wind speed range of 4 to 25m/s), it has been estimated that for 9m/s wind speed, the maximum
w
moment at the mudline level is about 60MN and for 20m/s wind speed, the maximum value is
.th
125MNm. Therefore the design over turning moment is 125MNm and if the allowable tilt is
ei
e
0.25degrees at the foundation level, one can therefore estimate the Rotational Foundation
t.o
stiffness required and is given by equation 1:
rg
/
IET Review Copy Only
Engineering & Technology Reference Page 6 of 11
= −
=
× (1)
In
This is a very large number and would require large diameter monopile or equally alternative
vi
foundation multiple pod foundations may be used.
te
d
ar
In this context it may be mentioned that SLS criteria impacts the foundation design and thereby
tic
costs. It has been reported that floating wind turbines are allowed to tilt by up to +/- 5 degrees
le
in the worst sea states. Therefore, it is necessary to understand the stringent criteria of 0.25 deg
fo
for grounded wind turbine system. A value of 0.25 deg represents a horizontal deflection of 450
rt
mm for a typical 80m tower. Clearly, a less stringent tilt criterion will save on the foundation
he
costs and installation time and make wind energy cheaper.
In
4.0 Challenges in Analysis of Dynamic Soil-Structure Interaction
st
itu
tio
Offshore wind turbines are new types of offshore structures and are unique in their features. The
n
most important difference with respect to oil and gas installation structures is that they are
of
dynamically sensitive (as explained in Section 2) and moment-resisting. Figure 5 shows a typical
En
monopile supported wind turbine and a pile supported fixed offshore jacket structure. There are,
gi
however, obvious differences between those two types of foundations. Piles for offshore structures
ne
are typically 60-110 m long and 1.8-2.7 m diameter and monopiles for offshore wind turbines
er
commonly 30-40 m long and 3.5-6 m diameter. Degradation in the upper soil layers resulting from
in
cyclic loading is less severe for offshore piles which are significantly restrained from pile head
g
rotation, whereas monopiles are free-headed. The commonly used design method using a beam on
an
non-linear Winkler springs (“p-y” method in API code or DNV code) may be used to obtain pile head
d
deflection under cyclic loading, but its use is limited for wind turbines because:
Te
(a) the widely used API model is calibrated against response to a small number of cycles (maximum
ch
200 cycles) for offshore fixed platform applications. In contrast, for a real offshore wind turbine 107-
no
108 cycles of loading are expected over a lifetime of 20-25 years.
lo
(b) under cyclic loading, the API or DNV model always predicts degradation of foundation stiffness in
gy
sandy soil. However, recent work by Bhattacharya and Adhikari (2011), Cuellar et al (2012), Leblanc
(IE
(2009) suggested that the foundation stiffness for a monopile in sandy soil will actually increase as a
result of densification of the soil next to the pile.
T)
(c) The ratio of horizontal load (P) to vertical load (V) is very high in offshore wind turbines when
:W
compared with fixed jacket structures.
ill
ap
pe
ar
in
ht
tp
://
w
w
w
.th
ei
et.o
rg
/
Figure 5: Offshore Wind Turbines and Offshore Oil and Gas Installations
IET Review Copy Only
Page 7 of 11 Engineering & Technology Reference
While, offshore wind turbine structures are designed for an intended life of 25 to 30 years, but little
is known about their long term dynamic behaviour under million of cycles of loading. While
monitoring of existing offshore wind turbine installation is a possibility and can be achieved at a
In
reasonable cost, full scale testing is very expensive. An alternative method is to carry out a carefully
vi
planned scaled dynamic testing to understand the scaling/similitude relationships which can be later
te
used for interpretation of the experimental data and also for scaling up the results to real
d
ar
prototypes. There are mainly two approaches to scale up the model test results to prototype
tic
consequences: first is to use standard tables for scaling and multiply the model observations by the
le
scale factor to predict the prototype response and the alternative is to study the underlying
fo
mechanics/physics of the problem based on the model tests recognising that not all the interaction
rt
can be scaled accurately in a particular test. Once the mechanics/physics of the problem are
he
understood, the prototype response can be predicted through analytical and/or numerical modelling
in which the physics/mechanics discovered will be implemented in a suitable way. The second
In
st
approach is particularly useful to study the dynamics of offshore wind turbines as it involves complex
itu
dynamic wind-wave-foundation-structure interaction and none of the physical modelling techniques
tio
can simultaneously satisfy all the interactions to the appropriate scale. Ideally, a wind tunnel
n
combined with a wave tank on a geotechnical centrifuge would serve the purpose but this is
of
unfortunately not feasible. It is recognised that not all physical mechanisms can be modelled
En
adequately and therefore those need special consideration while interpreting the test results. As
dynamic soil structure interaction of wind turbines are being studied, stiffness of the system is a top
gi
ne
priority. Bhattacharya et al (2011, 2013a, 2013b) carried out experimental testing of a 1:100 scaled
er
wind turbine to characterise the free dynamics of the system and to study the long term behaviour
in
under the action of the dynamic loading.
g
an
The following conclusions could be reached from the study:
d
(a) The change in natural frequencies of the wind turbine system may be affected by the choice of
Te
foundation system i.e. deep foundation or multiple pods (symmetric or asymmetric) on shallow
ch
foundations. Deep foundations such as monopiles will exhibit sway-bending mode i.e. the first two
no
vibration modes are widely spaced - typical ratio is 4 to 5. However multiple pod foundations
lo
supported on shallow foundations (such as tetrapod or tripod on suction caisson) will exhibit rocking
gy
modes in two principle planes (which are ofcourse orthogonal). Figure 5 shows the dynamic
(IE
response of monopile supported wind turbine and tetrapod foundation plotted in the loading
spectrum diagram.
T)
(b) The natural frequencies of wind turbine systems change with repeated cyclic/dynamic loading. In
:W
the case of strain-hardening site (such as loose to medium dense sandy site) the natural frequency is
ill
expected to increase and for strain-softening site (such as normally consolidated clay) the natural
ap
frequency will decrease.
pe
(c) The results showed that the multipod foundations (symmetric or asymmetric) exhibit two closely
ar
spaced natural frequencies corresponding to the rocking modes of vibration in two principle axes.
Furthermore, the corresponding two spectral peaks change with repeated cycles of loading and they
in
converge for symmetric tetrapods but not for asymmetric tripods. From the fatigue design point of
ht
tp
view, the two spectral peaks for multipod foundations broaden the range of frequencies that can be
://
excited by the broadband nature of the environmental loading (wind and wave) thereby impacting
w
the extent of motions. Thus the system lifespan (number of cycles to failure) may effectively
w
increase for symmetric foundations as the two peaks will tend to converge. However, for
w
.th
asymmetric foundations the system life may continue to be affected adversely as the two peaks will
ei
not converge. In this sense, designers should prefer symmetric foundations to asymmetric
e
foundations.
t.o
rg
/
IET Review Copy Only
Engineering & Technology Reference Page 8 of 11
In
vi
te
d
ar
tic
le
fo
rt
he
In
st
itu
tio
n
of
En
gi
Figure 6: Relationship between effect of natural frequency of suction caisson and monopile
ne
on the forcing frequencies
er
in
5.0 Foundation design
g
an
d
While design guidelines are available for offshore oil and gas installation foundations, its direct
Te
extrapolation/ interpolation to offshore wind turbine foundation design is not always possible, the
ch
reasons of which is explored in the earlier section. There are two reasons: (a) The foundations of
no
these structures are moment resisting i.e. large overturning moments at the foundation which are
disproportionately higher that the vertical load; (b) The structure is dynamically sensitive and
lo
gy
therefore fatigue is a design driver. This section of the article therefore explores a simplified
foundation design methodology which may be used during option engineering or preliminary design.
(IE
1. Compute the maximum mudline bending moment considering the different load
T)
combinations. The overturning moments due to 1P (misalignment) and 3P (blade
:W
shadowing) may be neglected in this step.
ill
2. Based on the allowable tilt criteria for the particular project- determine the foundation
ap
stiffness required as discussed in Section 3.1. This is the minimum stiffness that is required
to satisfy the SLS.
pe
3. It is then required to check the ULS criteria i.e. the foundation capacity. If the foundation is
ar
not adequate, the size must be increased.
in
4. The soil surrounding the foundations will be subjected to tens of millions of cycles of cyclic
ht
and dynamic loading of varying strain as well as varying frequency. It must be ensured that
tp
the soil remains in the linear elastic range so as not to alter the dynamic stiffness of the
://
w
foundation. For detailed design, Resonant Column testing is recommended to find the
w
threshold strains for the ground and further details on the use of threshold strain concept in
w
monopile design can be found in Lombardi et al (2013).
.th
5. Beam on Non-linear Winkler Model or Finite Element Analysis can be carried out and it must
ei
be ensured that the p-y curves in soil are within the linear elastic section at all depths.
et.o
However, 3D Finite Element Analyses are recommended to understand the strains around
rg
the foundation.
/
6. It is now required to obtain stiffness of the foundation to calculate natural frequency of the
whole system to check where the overall system is placed: soft-soft, soft-stiff or stiff-stiff
IET Review Copy Only
Page 9 of 11 Engineering & Technology Reference
(see Figure 4). If the natural frequency is not acceptable, the design parameters such as
foundation stiffness, tower stiffness and mass may be altered so that the desired frequency
is obtained. This is an iterative process.
In
7. The foundation stiffness may change over the life time of the wind turbine due to soil-
vi
structure interaction which will have an impact on the natural frequency of the system and
te
tilt. If the ground is sandy site (shown as strain-hardening site in Figure 4), the natural
d
ar
frequency to expected to increase and if it is a clay site (shown as strain-softening site in
tic
Figure 4), the natural frequency may decrease. If the site is layered, the change in natural
le
frequency cannot be ascertained a priory and depends on various factors including the
fo
geometry of layering. This is termed as uncertain site in Figure 4. Engineers need to carry
rt
out calculations to predict the change in frequency which is also necessary to compute the
he
fatigue loading.
In
st
5.1 Challenges in monopile foundation design and installation
itu
tio
Monopiles have been predominantly used to support Wind Turbine Generators (WTG) in water
n
depths up to 30m. However, there are discussions with regard to the use of monopiles in deeper
of
water depths termed as "XL" monopile. Preliminary calculations suggests that 10m diameter
En
monopiles weighing 1200tonnes may be suitable for 45m water depth and of course dependent of
gi
ground conditions. However, the use is uncertain due to the following: (a) no codified cyclic design
ne
to predict long term tilt; (b) lack of redundancy in foundation system and therefore chance of single-
er
point failure; (c) Installation costs and lack of adequate specialised vessels; (d) Connection between
in
foundation, transition piece and the tower. Some of these aspects are described below in further
g
details.
an
d
1. Lack of redundancy: Monopiles are "overturning moment" resisting structures and there are
Te
two main components: (a) overturning moment arising from the thrust acting at the hub
ch
level; (b) overturning moment due to the wave loading. Also these two moments can act in
no
two different planes and will vary constantly depending on the time of the day and time of
lo
the year. Monopiles are rigid piles and the foundation collapse can occur if the soil around
gy
the pile fails i.e. there would be rigid body movement. If the foundation starts to tilt, it is
(IE
very expensive to rectify.
T)
2. Cyclic (rather dynamic) design of monopile: The response of monopile under cyclic/dynamic
:W
load is not well understood and there are lack of guidance in codes of practice. If cyclic
ill
design is incorrect, monopile can tilt in the long term. If the tilt is more than the allowable
ap
limit, the turbine may need a shutdown. Monopile design is usually (also wrongly) carried
pe
out using API design procedure calibrated for flexible pile design where the pile is expected
ar
to fail by plastic hinge.
in
3. Issues related to installation of monopiles: Large monopile installation requires suitable
ht
tp
vessel availability as well as specialised heavy lifting equipments. Other issues are noise
://
refusals, buckling of the pile tip, drilling out, grouted connections. If the site contains weak
w
rock (siltstone/ sandstone/ mudstone) and where the local geology shows bedrock or hard
w
glacial soils at shallow depths, drive-drill-drive techniques may be required, with subsequent
w
.th
increases in cost and schedule. It must be mentioned here that driving reduces the fatigue
ei
life.
e
t.o
5.2 Jacket on flexible piles
rg
/
IET Review Copy Only
Engineering & Technology Reference Page 10 of 11
There has been a considerable interest in jacket type structures for deeper water applications but is
perceived being expensive due to the amount of steel required. However jackets supported on piles
can be considered as a safe solution due to excellent track record of good performance in offshore
In
oil and gas industry. Offshore Oil and Gas industry have been using long flexible piles (diameters
vi
upto 2.4m) which are easy to drive, necessary vessels are readily available (relatively as opposed to
te
vessels to install monopiles). This aspect will drive down the TIC (Time in Construction) costs
d
ar
regarding piling and also large vessels are not required for pile installation. However there are costs
tic
associated with Jacket installation. One of the requirement is the optimisation of the jacket so as to
le
consume minimum steel. There are two types of jacket - normal jacket or Twisted Jacket. The
fo
advantage of twisted jacket over normal jacket is fewer number of joints and therefore less fatigue
rt
issue.
he
CONCLUDING REMARKS
In
st
Offshore Wind Turbines are new types of offshore structure characterised by low stiffness (as a
itu
result flexible and having low natural frequency) and therefore sensitive to the dynamic loading
tio
imposed upon them. The article discusses the complexity involved in designing the foundation of
n
these structures. It has been shown that design guidelines available for offshore oil and gas
of
installation foundations cannot be direct extrapolated/ interpolated to offshore wind turbine
En
foundation design.
gi
ne
REFERENCES
er
1. Adhikari S, Bhattacharya S. (2012): Dynamic analysis of wind turbine towers on flexible
in
g
foundations. Shock and Vibration 2012; 19:37-56.
an
2. Adhikari S, Bhattacharya S. (2011): Vibrations of wind-turbines considering soil-structure
d
interaction. Wind and Structures - An International Journal 2011; 14:85-112.
Te
3. Bhattacharya S, Lombardi D, Muir Wood D M (2011). Similitude relationships for physical
ch
modelling of monopile- supported offshore wind turbines. International Journal of Physical
no
Modelling in Geotechnics 2011; 11(2):58-68.
4. Bhattacharya S and Adhikari S. (2011) Experimental validation of soil–structure interaction of
lo
gy
offshore wind turbines. Soil Dynamics and Earthquake Engineering 2011; 31(5-6):805-816.
5. Bhattacharya S, Cox J, Lombardi D, Muir Wood D (2013a). Dynamics of offshore wind turbines
(IE
supported on two foundations. Geotechnical engineering: Proceedings of the ICE 2013;
T)
166(2):159-169.
:W
6. Bhattacharya, S., N. Nikitas, J. Garnsey, N. A. Alexander, J. Cox, D. Lombardi, D. Muir Wood, and
ill
D. F. T. Nash (2013b): “Observed dynamic soil–structure interaction in scale testing of offshore
ap
wind turbine foundations,” Soil Dyn. Earthq. Eng., Vol 54, pp 47-60, 2013
pe
7. Carter (2007) Carter J. North hoyle offshore wind farm: design and build. Energy: Proceedings of
the Institution of Civil Engineers EN1 2007; 21–29.
ar
8. Cuéllar P, Georgi S, Baeßler M, Rücker W. On the quasi-static granular convective flow and sand
in
densification around pile foundations under cyclic lateral loading. Granular Matter 2012;
ht
14(1):11-25.
tp
9. DNV (Det Norske Veritas) 2002 Guidelines for Design of Wind Turbines, 2nd edition DNV,
://
w
London, UK.
w
10. Lombardi D, Bhattacharya S, Muir Wood D. Dynamic soil-structure interaction of monopile
w
supported wind turbines in cohesive soil. Soil Dynamics and Earthquake Engineering 2013;
.th
49:165-180.
ei
e
11. Leblanc, C (2009): “Design of Offshore Wind Turbine Support Structures - Selected topics in the
t.o
field of geotechnical engineering,” Aalborg University, Denmark, 2009.
rg
/
IET Review Copy Only
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- MH64 - SuperiorDocument2 pagesMH64 - SuperiorTimothy Owens67% (6)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Humint CorpsDocument16 pagesHumint CorpsdorinkarakogluNo ratings yet
- ThixotropyDocument14 pagesThixotropyDoThanhTungNo ratings yet
- 098010 - Địa Chất Công Trình - 2TCDocument8 pages098010 - Địa Chất Công Trình - 2TCDoThanhTungNo ratings yet
- Thuc Tap Dia Chat Cong Trinh - 1TCDocument7 pagesThuc Tap Dia Chat Cong Trinh - 1TCDoThanhTungNo ratings yet
- Soil Improvement Works For An Offshore Land ReclamationDocument13 pagesSoil Improvement Works For An Offshore Land ReclamationDoThanhTungNo ratings yet
- Performance of CPT-Based Methods To Assess Monopile Driveability in North Sea SandsDocument16 pagesPerformance of CPT-Based Methods To Assess Monopile Driveability in North Sea SandsDoThanhTungNo ratings yet
- Foundation Optimisation For Ever Larger Offshore Wind Turbines - Geotechnical PerspectiveDocument77 pagesFoundation Optimisation For Ever Larger Offshore Wind Turbines - Geotechnical PerspectiveDoThanhTungNo ratings yet
- Effect of Monopile Foundation Modeling On The Structural Response of A 5-MW Offshore Wind Turbine TowerDocument10 pagesEffect of Monopile Foundation Modeling On The Structural Response of A 5-MW Offshore Wind Turbine TowerDoThanhTungNo ratings yet
- Modelling of Latge Diameter Piles in USFOSDocument15 pagesModelling of Latge Diameter Piles in USFOSDoThanhTungNo ratings yet
- Field Test and Numerical Analysis of Offshore Laterally Loaded Pile in Multilayered SoilsDocument16 pagesField Test and Numerical Analysis of Offshore Laterally Loaded Pile in Multilayered SoilsDoThanhTungNo ratings yet
- Observing Friction Fatigue On Calcareous MaterialDocument7 pagesObserving Friction Fatigue On Calcareous MaterialDoThanhTungNo ratings yet
- Installation of Monopiles by Vibrohammers For The Riffgat ProjectDocument14 pagesInstallation of Monopiles by Vibrohammers For The Riffgat ProjectDoThanhTungNo ratings yet
- Phan Mem FB-Pier PDFDocument6 pagesPhan Mem FB-Pier PDFDoThanhTungNo ratings yet
- RapportDocument178 pagesRapportDoThanhTungNo ratings yet
- Guidelines For Offshore Insitu Testing and Interpretation in Deep Water Soft Clay PDFDocument14 pagesGuidelines For Offshore Insitu Testing and Interpretation in Deep Water Soft Clay PDFDoThanhTungNo ratings yet
- FT 1Document4 pagesFT 1franciscoNo ratings yet
- DetergentDocument15 pagesDetergentsur2296150% (4)
- Knowledge, Skills & Attributes: Maritime Human ResourcesDocument1 pageKnowledge, Skills & Attributes: Maritime Human Resources757rustamNo ratings yet
- Barreras Al Comercio InternacionalDocument8 pagesBarreras Al Comercio InternacionalLeonel Cardenas BeltranNo ratings yet
- Síntesis de Orto y para Nitro FenolDocument2 pagesSíntesis de Orto y para Nitro FenolLeidy BarreraNo ratings yet
- Energia Hidroelectrixa TorrelagunaDocument2 pagesEnergia Hidroelectrixa Torrelagunagavino_48No ratings yet
- Questões de Provas - Questões de ConcursosDocument3 pagesQuestões de Provas - Questões de ConcursosLiaNo ratings yet
- Customer Information Updation Form For KYCDocument1 pageCustomer Information Updation Form For KYCGanesh Fruit100% (1)
- Chapter 4 Exponential Smoothening MethodsDocument19 pagesChapter 4 Exponential Smoothening MethodsSushil KumarNo ratings yet
- Evidencias Examen Final de Gestion FinancieraDocument3 pagesEvidencias Examen Final de Gestion FinancieraNatali Espinoza BailonNo ratings yet
- Examen Parcial - Logistica - Grupo 2Document7 pagesExamen Parcial - Logistica - Grupo 2Sandra MaribelNo ratings yet
- NEC Express5800/R120f-1E System Configuration GuideDocument34 pagesNEC Express5800/R120f-1E System Configuration GuideBrucelee LeebouapaoNo ratings yet
- Matrizes - 3 AnoDocument4 pagesMatrizes - 3 AnoGleyci LemesNo ratings yet
- Ecommerce Chapter 2Document5 pagesEcommerce Chapter 2ABCNo ratings yet
- Recurso de Multa Aspra Exesso VelocidadeDocument8 pagesRecurso de Multa Aspra Exesso VelocidadeLeonardo JaburNo ratings yet
- Applying Facial Makeup PDFDocument39 pagesApplying Facial Makeup PDFJunDee Lynn Sato100% (1)
- De Mi Mayor Cerruto Tarea GuiaDocument3 pagesDe Mi Mayor Cerruto Tarea GuiaDanny bladimir choque mamaniNo ratings yet
- IT - 601 Unit 5.doxDocument60 pagesIT - 601 Unit 5.doxAyush KumarNo ratings yet
- OpenText Extended ECM For SAP Solutions 16.2 - Installation and Upgrade Guide English (ERLK160200-00-IGD-En-01)Document184 pagesOpenText Extended ECM For SAP Solutions 16.2 - Installation and Upgrade Guide English (ERLK160200-00-IGD-En-01)Praveen RaoNo ratings yet
- Computer Hoy 29MAR24Document76 pagesComputer Hoy 29MAR24rasocNo ratings yet
- Editor VIM-Set2023Document34 pagesEditor VIM-Set2023Yuri DelgadoNo ratings yet
- HC&E Catalyst Testing HandoutDocument37 pagesHC&E Catalyst Testing HandoutChristian HultebergNo ratings yet
- Tuberías - Clasificación y Caídas de PresiónDocument28 pagesTuberías - Clasificación y Caídas de PresiónRebeca P. ZarazúaNo ratings yet
- Les Agrégats de La Comptabilité NationaleDocument11 pagesLes Agrégats de La Comptabilité NationaleMustapha AmgharNo ratings yet
- Sequencia PositivaDocument16 pagesSequencia PositivaMikoian Rios RiosNo ratings yet
- Planificación Didáctica DiariaDocument2 pagesPlanificación Didáctica DiariaJose MiguelNo ratings yet
- DPIN TricicloDocument7 pagesDPIN TricicloJoseQuincheNo ratings yet
- Distracción-Celular y Alcohol - Factores Causantes de Los Accidentes de TránsitoDocument36 pagesDistracción-Celular y Alcohol - Factores Causantes de Los Accidentes de TránsitoAgustin Mamani MaytaNo ratings yet