You might also like
- ACOPOS Error TextsDocument224 pagesACOPOS Error TextsAnonymous 6Mb7PZj67% (3)
- Digital Encoders 1.2Document6 pagesDigital Encoders 1.2controlorNo ratings yet
- Notes On Belt WatchDocument8 pagesNotes On Belt WatchManasJadavNo ratings yet
- Motion Control Feedback DeviceDocument20 pagesMotion Control Feedback DeviceZyzerull SaadNo ratings yet
- Danaher Encoder HandbookDocument16 pagesDanaher Encoder HandbookatifkhushnoodNo ratings yet
- Simatic Easy Motion Control - ManualDocument176 pagesSimatic Easy Motion Control - ManualTomislav CanjugaNo ratings yet
- STD 22 Brochure PDFDocument4 pagesSTD 22 Brochure PDFNguyen Phuoc HoNo ratings yet
- Actuador Caldera SQN31.401 A 2760Document15 pagesActuador Caldera SQN31.401 A 2760Cesar OmarNo ratings yet
- EncoderDocument5 pagesEncoderAndari Dian AriestianiNo ratings yet
- Description J: Software: RK 4004-0003 F - ZGDocument62 pagesDescription J: Software: RK 4004-0003 F - ZGtotkumars100% (1)
- Encoders Product InformationDocument28 pagesEncoders Product InformationmohamedsamimorsiNo ratings yet
- Tdoct0654p EngDocument52 pagesTdoct0654p Englas.quangduyNo ratings yet
- Rotary Encoder PDFDocument8 pagesRotary Encoder PDFKhaled RabeaNo ratings yet
- wp-2011: The Basics of How An Encoder Works: White PaperDocument2 pageswp-2011: The Basics of How An Encoder Works: White PaperAnghelo AlcaldeNo ratings yet
- WP 2011 PDFDocument2 pagesWP 2011 PDFTony K.P100% (1)
- Single-Turn Encoders Vs Multi-Turn Encoders - DynaparDocument4 pagesSingle-Turn Encoders Vs Multi-Turn Encoders - DynaparMozhdeh HeydariNo ratings yet
- Angle of Attack Sensor Based On Arduino UNO MicrocontrollerDocument4 pagesAngle of Attack Sensor Based On Arduino UNO MicrocontrollerNaji YakzanNo ratings yet
- Movidrive Drive Inverters: Manual Positioning With Absolute Encoder and DIP11A Absolute Encoder OptionDocument34 pagesMovidrive Drive Inverters: Manual Positioning With Absolute Encoder and DIP11A Absolute Encoder Optionaleksandarca82No ratings yet
- Encoders & Resolvers:: How To Choose The Right Feedback OptionDocument5 pagesEncoders & Resolvers:: How To Choose The Right Feedback OptionAdam SmithNo ratings yet
- Potentiometer Error DetectorDocument2 pagesPotentiometer Error DetectorVarun BhanNo ratings yet
- Safari - Feb 4, 2024 at 11:38 PMDocument1 pageSafari - Feb 4, 2024 at 11:38 PMsyansyncNo ratings yet
- Magnetic EncodersDocument5 pagesMagnetic EncodersGarcia F. Marcio100% (1)
- sr20 Switchingsystems080222Document20 pagessr20 Switchingsystems080222Daniel BholahNo ratings yet
- Two-Wire End-of-Line Programmable Hall-Effect Switch/Latch: Description Features and BenefitsDocument21 pagesTwo-Wire End-of-Line Programmable Hall-Effect Switch/Latch: Description Features and Benefitsmario230991No ratings yet
- sbl23xx DatasheetDocument17 pagessbl23xx DatasheetAditya JainNo ratings yet
- What Are Rotary Encoders Used ForDocument11 pagesWhat Are Rotary Encoders Used ForjackNo ratings yet
- DS Tzidc en eDocument36 pagesDS Tzidc en eGregory Alberto Rodríguez PalominoNo ratings yet
- Sicat DMS: Disconnector Monitoring System For Overhead Contact Line SystemsDocument4 pagesSicat DMS: Disconnector Monitoring System For Overhead Contact Line SystemsDarius UžusenisNo ratings yet
- Encoder CatalogDocument24 pagesEncoder CatalogCao Minh TuấnNo ratings yet
- CNC Maintenace and RepairDocument22 pagesCNC Maintenace and RepairFresh From The ArchiveNo ratings yet
- Encoder Troubleshooting GuideDocument2 pagesEncoder Troubleshooting GuidejccNo ratings yet
- 3 NC 154602Document9 pages3 NC 154602Janusz StangeljNo ratings yet
- Tutorial EncoderDocument3 pagesTutorial EncoderbequeNo ratings yet
- Agilent Tech., DSO8104 Oscilloscope 1GHz Serive Manual PDFDocument162 pagesAgilent Tech., DSO8104 Oscilloscope 1GHz Serive Manual PDFLulu Sweet ThingNo ratings yet
- Control Sysytems by SuklaDocument51 pagesControl Sysytems by Suklavinay kumar MNo ratings yet
- PWM Control Strategy For Single Phase Inverter Using Arduino MicrocontrollerDocument6 pagesPWM Control Strategy For Single Phase Inverter Using Arduino MicrocontrollerManiraj PerumalNo ratings yet
- Tiduc 07Document33 pagesTiduc 07saahithya AlagarsamyNo ratings yet
- Model 950 8x11 EmailDocument4 pagesModel 950 8x11 Emailghani049051No ratings yet
- 571470-2K Linear Encoders For Numerically Controlled Machine Tools enDocument48 pages571470-2K Linear Encoders For Numerically Controlled Machine Tools ensundhar mohanNo ratings yet
- Chapter 3 - Automated Test EquipmentDocument5 pagesChapter 3 - Automated Test EquipmentRonald PatiamNo ratings yet
- Controlador de Direccion 1Document6 pagesControlador de Direccion 1JOEL APONTE ORTIZNo ratings yet
- Displacement TransducersDocument20 pagesDisplacement Transducerstibi7hac7No ratings yet
- Adc 5100 SeriesDocument2 pagesAdc 5100 SeriesLaurentiu IacobNo ratings yet
- VEGAMET 841 Controller Display Instrument Product Information CompressedDocument24 pagesVEGAMET 841 Controller Display Instrument Product Information CompressedvichitNo ratings yet
- Broschüre Standard22 Gyro Compass Retrofit SolutionDocument4 pagesBroschüre Standard22 Gyro Compass Retrofit SolutionTegoeh ANo ratings yet
- Electric Actuation - Bernard ControlsDocument4 pagesElectric Actuation - Bernard ControlsGoutham KSNo ratings yet
- A Meh392aDocument32 pagesA Meh392agsNo ratings yet
- Encoder White PaperDocument9 pagesEncoder White Papersaneie99No ratings yet
- Step MotorDocument84 pagesStep MotorEfraín Jara CasteloNo ratings yet
- Unit-4 PPT. Embedded Systems by SuryaDocument34 pagesUnit-4 PPT. Embedded Systems by SuryaAnonymous 3yqNzCxtTz100% (1)
- Digital Control: Ahmed Younis Ahmed 20140208Document21 pagesDigital Control: Ahmed Younis Ahmed 20140208Ahmed YounisNo ratings yet
- Encoder HeidemanDocument56 pagesEncoder HeidemanElinplastNo ratings yet
- Standard 22: Anschütz Gyro Compass SystemDocument4 pagesStandard 22: Anschütz Gyro Compass SystemNguyen Phuoc HoNo ratings yet
- S&A Optical Encoders PDFDocument34 pagesS&A Optical Encoders PDFNiravNo ratings yet
- Inverter Systems: For Gen 3 Drives of HEIDENHAIN ControlsDocument59 pagesInverter Systems: For Gen 3 Drives of HEIDENHAIN ControlsSir StigaNo ratings yet
- Trouble Shooting Guide For Incremental Encoders: Technical BulletinDocument2 pagesTrouble Shooting Guide For Incremental Encoders: Technical Bulletinjulio cidNo ratings yet
- X3-Brochure 1 (9-17) - 1 - CompressedDocument4 pagesX3-Brochure 1 (9-17) - 1 - CompressedAlrich BalanayNo ratings yet
- EncodersDocument5 pagesEncoderssank_knasNo ratings yet
- XDC2xxx: 2x150A/1x300A High Performance Forward/Reverse Brushed DC Motor Controller With USB, CAN and Encoder InputsDocument13 pagesXDC2xxx: 2x150A/1x300A High Performance Forward/Reverse Brushed DC Motor Controller With USB, CAN and Encoder InputsannarafaelaNo ratings yet
- Sound LocalizationDocument18 pagesSound LocalizationYasir JafriNo ratings yet
- Absolute Encoders Principle of OperationDocument2 pagesAbsolute Encoders Principle of OperationSakhawat Hossain RonyNo ratings yet
- ArduinoDocument29 pagesArduinoMathias Josue RAMIREZ QUICONo ratings yet
- Series D/H/M Fixed Displacement Gear Pumps Service Manual: HydraulicsDocument4 pagesSeries D/H/M Fixed Displacement Gear Pumps Service Manual: HydraulicsUlfran MedinaNo ratings yet
- Schrack Accessories Industrial Power Relay RT: General Purpose RelaysDocument6 pagesSchrack Accessories Industrial Power Relay RT: General Purpose RelaysUlfran MedinaNo ratings yet
- Amprobe 2006 Elec CatalogueDocument140 pagesAmprobe 2006 Elec CatalogueUlfran MedinaNo ratings yet
- Room Air Conditioner: Service ManualDocument42 pagesRoom Air Conditioner: Service ManualUlfran MedinaNo ratings yet
- AC Manual Motor Controllers: Without Overload Protection, 40 Amp 600V ACDocument1 pageAC Manual Motor Controllers: Without Overload Protection, 40 Amp 600V ACUlfran MedinaNo ratings yet
- PE Range Moulded Case Current Transformers: Energy DivisionDocument7 pagesPE Range Moulded Case Current Transformers: Energy DivisionUlfran MedinaNo ratings yet
- EDIODocument8 pagesEDIOSK CCNo ratings yet
- Linear Measuring Technology: Compact MWE21Document5 pagesLinear Measuring Technology: Compact MWE21MohamedNo ratings yet
- 02 0010 00Document12 pages02 0010 00brusilicaNo ratings yet
- Galil BLM-N23-50-1000-BDocument2 pagesGalil BLM-N23-50-1000-BServo2GoNo ratings yet
- Encoder - Pag 7Document22 pagesEncoder - Pag 7NILTON RAMOS ESTEBANNo ratings yet
- New Step Servo Driver-DL86H Manual: CatalogDocument7 pagesNew Step Servo Driver-DL86H Manual: CatalogKacper GorajNo ratings yet
- Incremental Encoders: Shaft Ø11 MM With EURO Flange B10 Resolution 1... 2500 PulsesDocument4 pagesIncremental Encoders: Shaft Ø11 MM With EURO Flange B10 Resolution 1... 2500 PulsesVictor HaraujoNo ratings yet
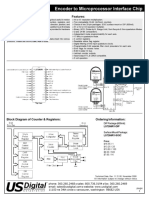
- Encoder To Microprocessor Interface Chip Chip: Features: DescriptionDocument6 pagesEncoder To Microprocessor Interface Chip Chip: Features: DescriptionserviciobsasNo ratings yet
- Solutions For Drive TechnologyDocument36 pagesSolutions For Drive TechnologyEdsonNo ratings yet
- BNC 2120Document11 pagesBNC 2120Armando GHNo ratings yet
- Open Source Rover: Electrical Assembly Instructions: Authors: Michael Cox, Eric Junkins, Olivia LofaroDocument17 pagesOpen Source Rover: Electrical Assembly Instructions: Authors: Michael Cox, Eric Junkins, Olivia LofaroPruthvi NinganurNo ratings yet
- Electronic Tachometer With Calculation Functions and 2 LimitsDocument4 pagesElectronic Tachometer With Calculation Functions and 2 Limitsnabil160874No ratings yet
- En Incremental Encoders Ed.2018 PDFDocument74 pagesEn Incremental Encoders Ed.2018 PDFracoom34No ratings yet
- Incremental Encoders: Solid Shaft With EURO Flange B10 25... 5000 Pulses Per RevolutionDocument4 pagesIncremental Encoders: Solid Shaft With EURO Flange B10 25... 5000 Pulses Per RevolutionSaraNo ratings yet
- Encoders For Servo DrivesDocument56 pagesEncoders For Servo DrivesArturo FuentesNo ratings yet
- Incremental Rotary Encoders Measure Pulses Per Revolution: Product BulletinDocument5 pagesIncremental Rotary Encoders Measure Pulses Per Revolution: Product BulletinMANOJNo ratings yet
- Programmable Logic Controllers: Counters (Cont'd)Document26 pagesProgrammable Logic Controllers: Counters (Cont'd)Dhanush SNo ratings yet
- Datasheet DRS61-A4A08192 1034985 enDocument4 pagesDatasheet DRS61-A4A08192 1034985 enDarwin DuqueNo ratings yet
- Baumer BDK Ds enDocument4 pagesBaumer BDK Ds enMehdi Houari ZaidNo ratings yet
- TMS570LS0432Document110 pagesTMS570LS0432Lu HoaNo ratings yet
- Catálogo SickDocument24 pagesCatálogo Sickcesar ramosNo ratings yet
- Pic 18 F 4431Document400 pagesPic 18 F 4431Marcos SolanoNo ratings yet
- M4. Position Control For DC Servo MotorsDocument20 pagesM4. Position Control For DC Servo Motors21146424No ratings yet
- Incremental Encoders: Through Hollow Shaft Ø70 MM 250... 2500 Pulses Per RevolutionDocument4 pagesIncremental Encoders: Through Hollow Shaft Ø70 MM 250... 2500 Pulses Per RevolutionLarry LayeNo ratings yet
- Data Sheet 6ES7350-1AH03-0AE0: Supply VoltageDocument3 pagesData Sheet 6ES7350-1AH03-0AE0: Supply VoltageCatalin OnofrencoNo ratings yet
- FlxMod ECI A2 - Brochure (100-EN)Document2 pagesFlxMod ECI A2 - Brochure (100-EN)Noureddine HAOUCHINo ratings yet
- 1 2 3 4 ADI4 - Analog Drive Interface For 4 Axis: Device ManualDocument79 pages1 2 3 4 ADI4 - Analog Drive Interface For 4 Axis: Device ManualROMERJOSENo ratings yet