You might also like
- Mathematical Analysis I: The Rectangular Coordinate SystemDocument6 pagesMathematical Analysis I: The Rectangular Coordinate SystemBlack PearlNo ratings yet
- Units: MATH 3 - Precalculus Review Engr. Rodge Ursua Page 1 of 6Document6 pagesUnits: MATH 3 - Precalculus Review Engr. Rodge Ursua Page 1 of 6ShineNo ratings yet
- 13 - Co-Ordinate Geometry BBADocument6 pages13 - Co-Ordinate Geometry BBAVeerannaSHiremathNo ratings yet
- 0.2 Lines in The Plane: The Real Number LineDocument14 pages0.2 Lines in The Plane: The Real Number Linebenalyn ignacioNo ratings yet
- Cengage Study Vectors Imp Physics Volume VectorDocument52 pagesCengage Study Vectors Imp Physics Volume VectorTECH-A -TRONICSNo ratings yet
- Coordinate Geometry Class X NotesDocument31 pagesCoordinate Geometry Class X NotesankitNo ratings yet
- 3rd Term s1 Further MathematicsDocument21 pages3rd Term s1 Further MathematicsFiffy McCormickNo ratings yet
- Raj Rajesh Institute™: Co-Ordinate GeometryDocument20 pagesRaj Rajesh Institute™: Co-Ordinate GeometryAWS DEVELOPERNo ratings yet
- Q2 M7Document8 pagesQ2 M7Shanaiah Charice GanasNo ratings yet
- 51 QuestionsDocument4 pages51 Questionsyesman69No ratings yet
- Cartesian-Plane 7th TopicDocument91 pagesCartesian-Plane 7th TopicFranklin BuisaNo ratings yet
- Lesson notes for weeks 1 and 2Document30 pagesLesson notes for weeks 1 and 2wisdomonuoha867No ratings yet
- Applications of Analytic GeometryDocument15 pagesApplications of Analytic GeometrydaniloNo ratings yet
- The Real Space: MATH 38. Mathematical Analysis III Imsp, Cas, UplbDocument38 pagesThe Real Space: MATH 38. Mathematical Analysis III Imsp, Cas, UplbFelicidad Dela CruzNo ratings yet
- Geometry, Matrix and Vector Calculus: Lecture Note Course Code: MAT 102B (For CEP)Document56 pagesGeometry, Matrix and Vector Calculus: Lecture Note Course Code: MAT 102B (For CEP)MUNIA AKTER MOONNo ratings yet
- Lesson Note 5Document35 pagesLesson Note 5Solange AtabongNo ratings yet
- Homework00-Solutions S14Document4 pagesHomework00-Solutions S14Mugisha AlainNo ratings yet
- Pre Calculus HandoutsDocument14 pagesPre Calculus HandoutsVince Leo Panoncillon GonzalesNo ratings yet
- Chapter 11 Geometry in Space and VectorsDocument42 pagesChapter 11 Geometry in Space and VectorsaminaNo ratings yet
- 10 Unit4Document28 pages10 Unit4mesfinNo ratings yet
- Distance Formula Midpoint FormulaDocument6 pagesDistance Formula Midpoint FormulaMilkie MangaoilNo ratings yet
- Coordinate Geometry Study GuideDocument16 pagesCoordinate Geometry Study GuideAdair Contemarero100% (1)
- Co-Ordinate GeometryDocument7 pagesCo-Ordinate GeometryHugh IngramNo ratings yet
- Introduction To Straight Lines (Students Study Material & Assignment)Document25 pagesIntroduction To Straight Lines (Students Study Material & Assignment)DAVID ABDULSHUAIB AYEDUNNo ratings yet
- Vectors and The Geometry of Space: 1.1 3D Coordinate SystemsDocument9 pagesVectors and The Geometry of Space: 1.1 3D Coordinate SystemsAshish DeekondaNo ratings yet
- Winter20MAT141 PSet1SolutionsDocument17 pagesWinter20MAT141 PSet1SolutionsJoy ReynonNo ratings yet
- ACT Coordinate GeometryDocument25 pagesACT Coordinate GeometryaftabNo ratings yet
- Analytic Geometry 1 PDFDocument37 pagesAnalytic Geometry 1 PDFDaniel Danille KristianNo ratings yet
- Points, Lines, and Conic SectionsDocument26 pagesPoints, Lines, and Conic SectionsShafiullah KhanNo ratings yet
- Xyz Coordinate System 2Document28 pagesXyz Coordinate System 2SAMMAKORFULNo ratings yet
- Graphs RevisionDocument15 pagesGraphs Revisionzylon.d.liteNo ratings yet
- Math 234, Practice Test #1Document4 pagesMath 234, Practice Test #1Adnan MehmoodNo ratings yet
- 3.1 Distance and Midpoint Formulas - Angles and Their MeasuresDocument26 pages3.1 Distance and Midpoint Formulas - Angles and Their MeasuresjalainejalilNo ratings yet
- 1.2 Graphs of Equations and CirclesDocument19 pages1.2 Graphs of Equations and CirclesWEDD FAWAZNo ratings yet
- Ap15 Calculus Ab q6Document8 pagesAp15 Calculus Ab q6Muse MusthafaNo ratings yet
- Math IA Type 1Document19 pagesMath IA Type 1Ly Minh DoanNo ratings yet
- Analytic Geometry: Plotting of PointsDocument12 pagesAnalytic Geometry: Plotting of Pointsly_annie@yahooNo ratings yet
- Week 1Document18 pagesWeek 1Shah AzNo ratings yet
- 02 CH 02 Linear Graphs and Simultaneous Linear EquationsDocument42 pages02 CH 02 Linear Graphs and Simultaneous Linear EquationsNovi Ryanti Siahaan100% (3)
- Worksheet A: Oordinate EometryDocument2 pagesWorksheet A: Oordinate EometryLolNo ratings yet
- Revision Sheet G10 - Solved PDFDocument5 pagesRevision Sheet G10 - Solved PDFAlaeddine AzaiezNo ratings yet
- Mathematics 9 Quarter 1 Week 8: NAME: - GR & SEC: - CompetencyDocument11 pagesMathematics 9 Quarter 1 Week 8: NAME: - GR & SEC: - CompetencyPARMAN, REGINE MAYE C.No ratings yet
- ALEVEL Math Pepr 1 Set 15 PDFDocument3 pagesALEVEL Math Pepr 1 Set 15 PDFJeremiah NakibingeNo ratings yet
- Solucionario Parcial Cálculus 1 y 2 (Tom Apostol) - Parte7Document48 pagesSolucionario Parcial Cálculus 1 y 2 (Tom Apostol) - Parte7A A Asdasd DfNo ratings yet
- ANALYTIC GEOMETRY: DIVISION OF LINE SEGMENTDocument7 pagesANALYTIC GEOMETRY: DIVISION OF LINE SEGMENTjonnel batuigasNo ratings yet
- MS9 CH14 Coordinate Geometry (3)Document61 pagesMS9 CH14 Coordinate Geometry (3)aiden.tonthatNo ratings yet
- Coordinate Geometry: Class XDocument52 pagesCoordinate Geometry: Class XamanNo ratings yet
- 2022 PAWSSrinivasan Notes 1Document10 pages2022 PAWSSrinivasan Notes 1SantiagoPinedaMontoyaNo ratings yet
- Math 101a - Topic 2Document6 pagesMath 101a - Topic 2Takashi TiteNo ratings yet
- The Rectangular Coordinate SystemDocument6 pagesThe Rectangular Coordinate SystemTakashi TiteNo ratings yet
- Three Dimensional Coordinate System. Functions of Two Variables. SurfacesDocument5 pagesThree Dimensional Coordinate System. Functions of Two Variables. SurfacesDamaris Kaminza100% (1)
- Maths SL PracticeDocument3 pagesMaths SL PracticeGAVUENo ratings yet
- MEI AS Mathematics: Coordinate Geometry: Section 1: Points and Straight LinesDocument8 pagesMEI AS Mathematics: Coordinate Geometry: Section 1: Points and Straight Linesbobjeffords687No ratings yet
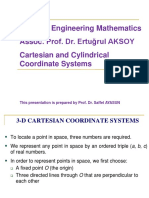
- EEE 201 Engineering Mathematics Assoc - Prof. Dr. Ertuğrul AKSOY Cartesian and Cylindrical Coordinate SystemsDocument56 pagesEEE 201 Engineering Mathematics Assoc - Prof. Dr. Ertuğrul AKSOY Cartesian and Cylindrical Coordinate Systems357911No ratings yet
- MH1811 Tutorial 1 - MC - 2020 - FN - Lmts - SolnDocument11 pagesMH1811 Tutorial 1 - MC - 2020 - FN - Lmts - SolnYachen WuNo ratings yet
- 2010 VJC h2 Prelim p2Document7 pages2010 VJC h2 Prelim p2cjcsucksNo ratings yet
- Chapter 2 PolynomialsDocument42 pagesChapter 2 PolynomialsnirmalvNo ratings yet
- 00 C3 Mock To June 10Document44 pages00 C3 Mock To June 10Nayantara GopiNo ratings yet
- College Algebra - Sample12qwDocument25 pagesCollege Algebra - Sample12qwAbchoNo ratings yet
- College Algebra - SampleasDocument6 pagesCollege Algebra - SampleasAbchoNo ratings yet
- College Algebra5Document25 pagesCollege Algebra5AbchoNo ratings yet
- College Algebra - SampleDocument25 pagesCollege Algebra - SampleAbchoNo ratings yet
- College Algebra - SampleasdasdDocument25 pagesCollege Algebra - SampleasdasdAbchoNo ratings yet
- College Algebra - SampleqdgDocument25 pagesCollege Algebra - SampleqdgAbchoNo ratings yet
- College Algebra - Sample12Document25 pagesCollege Algebra - Sample12AbchoNo ratings yet
- Solution: Try ItDocument100 pagesSolution: Try ItAbchoNo ratings yet
- Mathematics: Course TechnologyDocument6 pagesMathematics: Course TechnologyAbchoNo ratings yet
- Instructional Model: Course TechnologyDocument6 pagesInstructional Model: Course TechnologyAbchoNo ratings yet
- EUA 105 Pfizer Paxlovid FS For HCPs 05242023 - 0Document41 pagesEUA 105 Pfizer Paxlovid FS For HCPs 05242023 - 0bachillerataNo ratings yet
- QethDocument100 pagesQethAbchoNo ratings yet
- Lab ReferenceDocument3 pagesLab ReferenceAbchoNo ratings yet
- Spectrum ProcessDocument1 pageSpectrum ProcessAbchoNo ratings yet
- Fibrilacion Auricular Aha PDFDocument69 pagesFibrilacion Auricular Aha PDFMANUELNo ratings yet
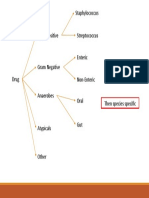
- Drug Disease TemplateDocument1 pageDrug Disease TemplateAbchoNo ratings yet
- Labs: Wood Adhesives and Coatings: ScheduleDocument3 pagesLabs: Wood Adhesives and Coatings: ScheduleArnav DasaurNo ratings yet
- Data Analysis and Research MethodologyDocument2 pagesData Analysis and Research MethodologyNitishaNo ratings yet
- Work, Power & Energy Module JB (MS)Document17 pagesWork, Power & Energy Module JB (MS)Danil Mohd AzmaniNo ratings yet
- Organic Chemistry Lesson on Cyclic HydrocarbonsDocument12 pagesOrganic Chemistry Lesson on Cyclic HydrocarbonsShamarie Love MaribaoNo ratings yet
- SW Lightsaber Guide.2.6.17Document54 pagesSW Lightsaber Guide.2.6.17Jose LimaNo ratings yet
- Probability TheoryDocument9 pagesProbability TheoryAlamin AhmadNo ratings yet
- Analysis of Amino AcidsDocument3 pagesAnalysis of Amino AcidsRinaldi SukarnoNo ratings yet
- Coding 222222222Document5 pagesCoding 222222222Abhyudaya mauryaNo ratings yet
- Design Brief On MEP Systems PDFDocument21 pagesDesign Brief On MEP Systems PDFAdhikari ThushanNo ratings yet
- Homo Deus PDFDocument14 pagesHomo Deus PDFThaw TarNo ratings yet
- Chemistry Grade 11Document198 pagesChemistry Grade 11Jan92% (24)
- ADVANCED PRACTICE TEST 2Document7 pagesADVANCED PRACTICE TEST 2phươngNo ratings yet
- MECHATRONICSSYSTEMSDocument12 pagesMECHATRONICSSYSTEMSAbolaji MuazNo ratings yet
- Ucla Dissertation CommitteeDocument7 pagesUcla Dissertation CommitteeWriteMyPapersDiscountCodeCleveland100% (1)
- Sagittarius Season WorkbookDocument50 pagesSagittarius Season Workbookmaevadrouot52No ratings yet
- SPEX 201 Lab 1 - Motion Analysis Techniques - STUDENT - 2023Document8 pagesSPEX 201 Lab 1 - Motion Analysis Techniques - STUDENT - 2023tom mallardNo ratings yet
- PHYS 419 Classical Mechanics Lecture Notes on Quadratic Air ResistanceDocument3 pagesPHYS 419 Classical Mechanics Lecture Notes on Quadratic Air ResistanceComp 3rdNo ratings yet
- API 5L 46thDocument35 pagesAPI 5L 46thInam Ul Haq KhanNo ratings yet
- Sep. Gravimetrica - CromitaDocument13 pagesSep. Gravimetrica - Cromitaemerson sennaNo ratings yet
- Common Themes in LiteratureDocument2 pagesCommon Themes in LiteratureMoon5627No ratings yet
- UntitledDocument76 pagesUntitledjaiNo ratings yet
- Formulating Rules in Finding The NTH TermDocument17 pagesFormulating Rules in Finding The NTH TermMaximino Eduardo SibayanNo ratings yet
- Din 2215 2Document7 pagesDin 2215 2Dule JovanovicNo ratings yet
- Trauma Stewardship: An Everyday Guide To Caring For Self While Caring For Others - Laura Van Dernoot LipskyDocument5 pagesTrauma Stewardship: An Everyday Guide To Caring For Self While Caring For Others - Laura Van Dernoot Lipskyhyficypo0% (3)
- AI Unit 1 PDFDocument51 pagesAI Unit 1 PDFAshishNo ratings yet
- Lecture 12 - Mass Balance ApproachDocument18 pagesLecture 12 - Mass Balance ApproachAshhad ShafiqueNo ratings yet
- Pengaruh Etika Kepemimpinan, Fungsi Badan Pengawas, Tingkat Pemahaman Akuntansi Terhadap Kualitas Pelaporan Keuangan LPD Di Kota DenpasarDocument12 pagesPengaruh Etika Kepemimpinan, Fungsi Badan Pengawas, Tingkat Pemahaman Akuntansi Terhadap Kualitas Pelaporan Keuangan LPD Di Kota DenpasarNaufal Kamil FauziNo ratings yet
- TextMesh Generation of Realistic 3D Meshes From Text PromptsDocument25 pagesTextMesh Generation of Realistic 3D Meshes From Text Prompts黃偉宸No ratings yet
- Circular Building Process Reuse of Insulators From Construction and Demolition Waste To Produce Lime MortarsBuildings PDFDocument25 pagesCircular Building Process Reuse of Insulators From Construction and Demolition Waste To Produce Lime MortarsBuildings PDFGonzalo Fuentes GuimetNo ratings yet
- Chapter 2 Soil-Water-PlantDocument44 pagesChapter 2 Soil-Water-PlantReffisa JiruNo ratings yet