You might also like
- Solution Manual of Solid State Physics, Charles Kittles PDFDocument64 pagesSolution Manual of Solid State Physics, Charles Kittles PDFYeo Jun Yi100% (1)
- Icold Committe On Cemented Materail Dams Rock-Filled Concrete DamsDocument123 pagesIcold Committe On Cemented Materail Dams Rock-Filled Concrete DamsMarcelo ProtzNo ratings yet
- Engineering Drawing N2Document41 pagesEngineering Drawing N2Ofentse Racodi100% (3)
- Free Piano Sheet Music An Old Irish Blessing PDFDocument2 pagesFree Piano Sheet Music An Old Irish Blessing PDFMatt0% (6)
- Astm A709Document8 pagesAstm A709Cristian OtivoNo ratings yet
- The Art of The Leader - Cohen.ebsDocument6 pagesThe Art of The Leader - Cohen.ebsJan Dave Ogatis100% (1)
- 09 1st and 2nd Order Approximations PDFDocument9 pages09 1st and 2nd Order Approximations PDFErgys LikaNo ratings yet
- 09 1st and 2nd Order ApproximationsDocument9 pages09 1st and 2nd Order ApproximationsSudheerKumarNo ratings yet
- UntitledDocument14 pagesUntitledCupa no DensetsuNo ratings yet
- Gyrostellar EstimationDocument6 pagesGyrostellar EstimationMarcAlomarPayerasNo ratings yet
- Robust Control NotesDocument415 pagesRobust Control NotesjgkostasNo ratings yet
- Controller Design Using Root Locus: 14.1 PD ControlDocument11 pagesController Design Using Root Locus: 14.1 PD Controlasalifew belachewNo ratings yet
- Chap10 - 2 - Stability of Closed-Loop Control SystemsDocument27 pagesChap10 - 2 - Stability of Closed-Loop Control SystemsSaidNo ratings yet
- EEET2197 Tute8 SolnDocument14 pagesEEET2197 Tute8 SolnCollin lcwNo ratings yet
- Polar Plot and Its Analysis GATE Study Material in PDFDocument6 pagesPolar Plot and Its Analysis GATE Study Material in PDFimvuuser1No ratings yet
- Lund 9903 SolDocument4 pagesLund 9903 SolAli DurazNo ratings yet
- Gouy PhaseDocument11 pagesGouy Phase王煜閔No ratings yet
- Nichols Charts: Stability & FeedbackDocument7 pagesNichols Charts: Stability & FeedbackArsenal HolicNo ratings yet
- ECE 455: Optical Electronics: Homework 4 Solutions 1 Lineshape IDocument2 pagesECE 455: Optical Electronics: Homework 4 Solutions 1 Lineshape ItomNo ratings yet
- Workbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsDocument26 pagesWorkbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsashutoshsinghjssNo ratings yet
- References: 10m/s 60cm 60cmDocument9 pagesReferences: 10m/s 60cm 60cmAliOucharNo ratings yet
- Paul Summers Final Write UpDocument17 pagesPaul Summers Final Write UpcartamenesNo ratings yet
- Polar Plot and Its Analysis - GATE Study Material in PDFDocument6 pagesPolar Plot and Its Analysis - GATE Study Material in PDFnidhi tripathiNo ratings yet
- A6 SolutionDocument8 pagesA6 SolutionRaja KumarNo ratings yet
- Lecture 5Document15 pagesLecture 5NitinKumarNo ratings yet
- Root LocusDocument33 pagesRoot LocusRajendar PonagantiNo ratings yet
- Gain and Phase MarginsDocument5 pagesGain and Phase MarginsamitkallerNo ratings yet
- Lecture38 PDFDocument5 pagesLecture38 PDFNiyas PNo ratings yet
- 2010 Fall With SolutionsDocument36 pages2010 Fall With SolutionsRay MondoNo ratings yet
- Tutorial 8 - Stability and The S' Plane: © D.J.Dunn 1Document0 pagesTutorial 8 - Stability and The S' Plane: © D.J.Dunn 1Karthi KeyanNo ratings yet
- Control EnggDocument5 pagesControl EnggRaja KumarNo ratings yet
- Double PendulumDocument7 pagesDouble PendulumIndranil BhattacharyyaNo ratings yet
- Application of Laplace Transform - Two Masses On SpringsDocument3 pagesApplication of Laplace Transform - Two Masses On SpringsCharles100% (1)
- NLM With Soultion AssignmentDocument15 pagesNLM With Soultion Assignmentrineeth22745No ratings yet
- Zero DynamicsDocument27 pagesZero DynamicsManash Protim DeoriNo ratings yet
- Optical Network SolDocument85 pagesOptical Network SolJohn Erhinyo50% (2)
- MATLAB SIMULATIONS FOR GARNELL's ROLL AUTOPILOTDocument16 pagesMATLAB SIMULATIONS FOR GARNELL's ROLL AUTOPILOTD.ViswanathNo ratings yet
- Vibrational Pseudospin Solution (Triglycine Sulphate Crystal) For Computing TechnologyDocument10 pagesVibrational Pseudospin Solution (Triglycine Sulphate Crystal) For Computing TechnologyRakeshconclaveNo ratings yet
- French 4 SolutionsDocument10 pagesFrench 4 SolutionsFranky Jose Quintero RangelNo ratings yet
- G K S S: Che381 Process Dynamics & Control Jan-Apr 2014 End-Semester Exam 3 Hours 100 PointsDocument4 pagesG K S S: Che381 Process Dynamics & Control Jan-Apr 2014 End-Semester Exam 3 Hours 100 PointsSushmitaNo ratings yet
- Test 3 Solution 2014 PDFDocument4 pagesTest 3 Solution 2014 PDFManishaa Varatha RajuNo ratings yet
- 1 Digital Control System Design 1.: Pole Assignment MethodDocument56 pages1 Digital Control System Design 1.: Pole Assignment MethodAmruth ThelkarNo ratings yet
- 2GP1Document10 pages2GP1NisahNo ratings yet
- Lecture 2Document8 pagesLecture 2Aravind SankarNo ratings yet
- 1 - Compensator Design Procedure - Lead - Lag - With ExamplesDocument12 pages1 - Compensator Design Procedure - Lead - Lag - With ExamplesMadhav SNo ratings yet
- Stability of Closed-Loop Control SystemsDocument19 pagesStability of Closed-Loop Control SystemsThrishnaa BalasupurManiamNo ratings yet
- Close Lood Rover - ExampleDocument6 pagesClose Lood Rover - ExampleBilal ShahidNo ratings yet
- Discrete Applied Mathematics: Yisheng Jiang, Mei LuDocument8 pagesDiscrete Applied Mathematics: Yisheng Jiang, Mei LuBalachandranNo ratings yet
- Rotating PendulumDocument12 pagesRotating Pendulumjerome meccaNo ratings yet
- Difference Equations Notes, Chapter Six OnlyDocument35 pagesDifference Equations Notes, Chapter Six OnlyMwesigye John PaskariNo ratings yet
- Notes-Nyquist Plot and Stability CriteriaDocument16 pagesNotes-Nyquist Plot and Stability CriteriaGanesh RadharamNo ratings yet
- Lec 6: Gain, Phase Margin, Designing With Bode Plots, CompensatorsDocument10 pagesLec 6: Gain, Phase Margin, Designing With Bode Plots, CompensatorszakiannuarNo ratings yet
- A) Help The Designer To Find All K : Sat (V)Document3 pagesA) Help The Designer To Find All K : Sat (V)●●●●●●●1No ratings yet
- Open & Closed Loop LinksDocument7 pagesOpen & Closed Loop LinkscataiceNo ratings yet
- Control Systems Engineering D227 S.A.E. Solutions Tutorial 7 - Stability Analysis Self Assessment Exercise No.1Document4 pagesControl Systems Engineering D227 S.A.E. Solutions Tutorial 7 - Stability Analysis Self Assessment Exercise No.1cataiceNo ratings yet
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- Simple Algebras, Base Change, and the Advanced Theory of the Trace Formula. (AM-120), Volume 120From EverandSimple Algebras, Base Change, and the Advanced Theory of the Trace Formula. (AM-120), Volume 120No ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Ibtphem Course Flyer and Application 2020Document3 pagesIbtphem Course Flyer and Application 2020Kj_bdNo ratings yet
- Fire Safety Basic Series Flyer TB1Document1 pageFire Safety Basic Series Flyer TB1Kj_bdNo ratings yet
- Dynamic System Models ShortDocument19 pagesDynamic System Models ShortKj_bdNo ratings yet
- E1 NLPDocument2 pagesE1 NLPKj_bdNo ratings yet
- Functional Upgrade: SiemensDocument1 pageFunctional Upgrade: SiemensKj_bdNo ratings yet
- Application of Geographical Information System (GIS) Technology in The Control of Buruli Ulcer in GhanaDocument9 pagesApplication of Geographical Information System (GIS) Technology in The Control of Buruli Ulcer in GhanaKj_bdNo ratings yet
- 802Document29 pages802Kj_bdNo ratings yet
- Lecture Note 2: Configuration Space: ECE5463: Introduction To RoboticsDocument19 pagesLecture Note 2: Configuration Space: ECE5463: Introduction To RoboticsKj_bdNo ratings yet
- Positioner Set Up & Calibration: Dyna-Flo Control Valve Services LTDDocument1 pagePositioner Set Up & Calibration: Dyna-Flo Control Valve Services LTDKj_bdNo ratings yet
- Siemens Overview For Factory Mounted Ps2'SDocument1 pageSiemens Overview For Factory Mounted Ps2'SKj_bdNo ratings yet
- Positioner Set Up & Calibration: Dyna-Flo Control Valve Services LTDDocument1 pagePositioner Set Up & Calibration: Dyna-Flo Control Valve Services LTDKj_bdNo ratings yet
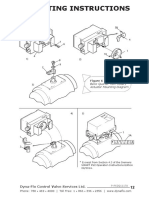
- Mounting Instructions: Basic Quarter Turn Rotary Actuator Mounting DiagramDocument1 pageMounting Instructions: Basic Quarter Turn Rotary Actuator Mounting DiagramKj_bdNo ratings yet
- Siemens PS2: Installation and F.A.Q.'SDocument1 pageSiemens PS2: Installation and F.A.Q.'SKj_bdNo ratings yet
- Siemens PS2: Installation and F.A.Q.'SDocument1 pageSiemens PS2: Installation and F.A.Q.'SKj_bdNo ratings yet
- Siemens Overview For Factory Mounted Ps2'S: Figure 7 Display WindowDocument1 pageSiemens Overview For Factory Mounted Ps2'S: Figure 7 Display WindowKj_bdNo ratings yet
- Mounting Instructions: Basic Quarter Turn Rotary Actuator Mounting DiagramDocument1 pageMounting Instructions: Basic Quarter Turn Rotary Actuator Mounting DiagramKj_bdNo ratings yet
- 9758-Article Text-17770-2-10-20190313Document15 pages9758-Article Text-17770-2-10-20190313Kj_bdNo ratings yet
- Plotting Your Buyer Utility MapDocument5 pagesPlotting Your Buyer Utility MapAnum ShamimNo ratings yet
- HMPE 204 Unit 7Document51 pagesHMPE 204 Unit 7LYRA MAE JOCSON- PATIAMNo ratings yet
- Steam Turbine Solutions Steam Turbine SolutionsDocument8 pagesSteam Turbine Solutions Steam Turbine SolutionsramakantinamdarNo ratings yet
- Dealing With Noise and Vibration in Automotive Industry: SciencedirectDocument8 pagesDealing With Noise and Vibration in Automotive Industry: SciencedirectPutu SuwendraNo ratings yet
- ResumeDocument2 pagesResumeapi-503238898No ratings yet
- Mechanical Drawing Tolerances and FitsDocument26 pagesMechanical Drawing Tolerances and FitsVignesh WaranNo ratings yet
- Letter From Department of State General Counsel Brad McvayDocument2 pagesLetter From Department of State General Counsel Brad McvayJacob OglesNo ratings yet
- MP3 DFPlayer Mini Module ENGDocument36 pagesMP3 DFPlayer Mini Module ENGmariguanixNo ratings yet
- Read online textbook Kingsbane Legrand Claire ebook all chapter pdfDocument22 pagesRead online textbook Kingsbane Legrand Claire ebook all chapter pdfjamel.harteau488100% (2)
- Design and Fabrication of Engine Powered Two Rows Rice Transplanting MachineDocument69 pagesDesign and Fabrication of Engine Powered Two Rows Rice Transplanting MachineSohaib Imran75% (8)
- May 2022 - Natural Capital Accounting RoadmapDocument105 pagesMay 2022 - Natural Capital Accounting RoadmapOCENR Legazpi CityR.M.AbacheNo ratings yet
- (AFFIN) - Form - Moratorium C19 - FINAL - 25 Feb2020Document2 pages(AFFIN) - Form - Moratorium C19 - FINAL - 25 Feb2020janicejongNo ratings yet
- owasp zap hostedscan report 2024-04-30Document16 pagesowasp zap hostedscan report 2024-04-30Tymmz AlloteyNo ratings yet
- 414CC3 - Excel Template - Prelim Shell and Tube Heat Exchanger Design - Si - UnitsDocument4 pages414CC3 - Excel Template - Prelim Shell and Tube Heat Exchanger Design - Si - Unitsvazzoleralex6884No ratings yet
- Putripurbasari, Journal Manager, 115 - 127 PERAN NEGARA DAN PENERAPAN PANCASILA DALAM MEWUJUDKAN NEGARA KESEJAHTERAANDocument12 pagesPutripurbasari, Journal Manager, 115 - 127 PERAN NEGARA DAN PENERAPAN PANCASILA DALAM MEWUJUDKAN NEGARA KESEJAHTERAANdelvinogans624No ratings yet
- What Is SBMDocument5 pagesWhat Is SBMRochelle Alava CercadoNo ratings yet
- Future of European Refining IndustryDocument23 pagesFuture of European Refining Industryp10souravnNo ratings yet
- Guideline For ERMP - July - 2020 PDFDocument18 pagesGuideline For ERMP - July - 2020 PDFJamal100% (1)
- Lincoln Declaration Drought IndicesDocument2 pagesLincoln Declaration Drought IndicesRita RochaNo ratings yet
- Restaurant Name (To Be Full AddressDocument12 pagesRestaurant Name (To Be Full AddressSunil PatelNo ratings yet
- GR No 192074 Light Rail V SalvanaDocument18 pagesGR No 192074 Light Rail V SalvanaKristela AdraincemNo ratings yet
- W5Q - Stainless SteelDocument6 pagesW5Q - Stainless SteelHuy NguyễnNo ratings yet
- KMRL ProjectDocument48 pagesKMRL Projectvineethkmenon80% (10)
- Leading Change Case StudyDocument10 pagesLeading Change Case StudyRobert MuturiNo ratings yet
- Long Term FinanceDocument25 pagesLong Term FinanceAr Muhammad RiyasNo ratings yet