You might also like
- Argument Essay 2 Artificial IntelligenceDocument11 pagesArgument Essay 2 Artificial IntelligenceBERNARDINA EVERILDA TUSHNo ratings yet
- How To SolderDocument16 pagesHow To SolderIan Holdeman100% (1)
- IEEE STDF 519 2014Document29 pagesIEEE STDF 519 2014paoloesquivel100% (1)
- Sketch-Turn: DOOSAN Conversational Programming SoftwareDocument8 pagesSketch-Turn: DOOSAN Conversational Programming SoftwareTrajan DonevskiNo ratings yet
- Chapter 2 - Project Integration ManagementDocument38 pagesChapter 2 - Project Integration ManagementSankalp NavghareNo ratings yet
- Mainframe Architecture Product Overview 1218153498319609 9Document69 pagesMainframe Architecture Product Overview 1218153498319609 9Santosh Reddy100% (1)
- Tsi AssigmentDocument4 pagesTsi Assigmentsingiten111No ratings yet
- StaticDocument3 pagesStaticnarendra29000No ratings yet
- Real Time System - : BITS PilaniDocument27 pagesReal Time System - : BITS PilanivithyaNo ratings yet
- Exercise3 - Solution Introduction For Embedded SystemsDocument8 pagesExercise3 - Solution Introduction For Embedded Systemsquoctrung244No ratings yet
- RTS Unit 2 NotesDocument9 pagesRTS Unit 2 NotesSAROJ RAJANo ratings yet
- Exercise3 SolutionDocument9 pagesExercise3 Solutionaditya jindalNo ratings yet
- Real Time Systemsoln - Chap4Document6 pagesReal Time Systemsoln - Chap4abhayarya20000No ratings yet
- RST 2Document80 pagesRST 2Nivedita Acharyya 2035No ratings yet
- S1-17-Bits Zg553 Es Zg553 Melzg553-L7Document37 pagesS1-17-Bits Zg553 Es Zg553 Melzg553-L7Anonymous 2iwc7qzhGNo ratings yet
- Branch and Bound With JS (Least Cost, Job Sequencing)Document24 pagesBranch and Bound With JS (Least Cost, Job Sequencing)Shivansh GoelNo ratings yet
- 3.3 Job Sequencing With DeadlinesDocument13 pages3.3 Job Sequencing With Deadlineskollavivek_534195858100% (1)
- Gcu 10RDocument3 pagesGcu 10RJimmy GuzmanNo ratings yet
- Chapter 5 Uniprocessor Scheduling p2Document23 pagesChapter 5 Uniprocessor Scheduling p2Ahmed Ibrahim GhnnamNo ratings yet
- FIRST COME FIRST SERVE (Focus Sa Arrival Time) : TimelineDocument9 pagesFIRST COME FIRST SERVE (Focus Sa Arrival Time) : TimelineRazzel MarasiganNo ratings yet
- Department of Mechanical Engineering: MET 304: Operations Planning and ControlDocument1 pageDepartment of Mechanical Engineering: MET 304: Operations Planning and ControlRajeev AgrawalNo ratings yet
- Exercise3 - Introduction For Embedded SystemsDocument3 pagesExercise3 - Introduction For Embedded Systemsquoctrung244No ratings yet
- MiddleExam 01Document1 pageMiddleExam 01Nguyen Duc TaiNo ratings yet
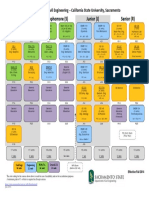
- Flowchart For CSU CE DegreeDocument1 pageFlowchart For CSU CE DegreeDavid J. HavenNo ratings yet
- Hca 6 SceduleDocument3 pagesHca 6 SceduleK Pushpendu PrashantNo ratings yet
- Media Search - Rebe8447 - Product Support Program For Reworking The Fuel Filtration System On Certain 320d ExcavatorsDocument6 pagesMedia Search - Rebe8447 - Product Support Program For Reworking The Fuel Filtration System On Certain 320d ExcavatorsGame AccountNo ratings yet
- 05 EventDrivenDocument30 pages05 EventDrivenAlok kumarNo ratings yet
- PRELIM Exam CPU SchedDocument4 pagesPRELIM Exam CPU SchedLorenze Dela CruzNo ratings yet
- Arnes ComponentesDocument224 pagesArnes Componentesesteban198845210298No ratings yet
- Chapter 5Document19 pagesChapter 5poniteNo ratings yet
- 6905 Masterv 10Document2 pages6905 Masterv 10corsair24x2No ratings yet
- OS MSIT Assignment 1Document3 pagesOS MSIT Assignment 1Debbie BanzalesNo ratings yet
- Sequencing and SchedulingDocument15 pagesSequencing and Schedulingb23018No ratings yet
- Mini Talk 11Document22 pagesMini Talk 11MohakBhatiaNo ratings yet
- Final SchedulingDocument7 pagesFinal SchedulingRihana Nhat KhueNo ratings yet
- Assignment 02 Mech495-202428CodingandScheduling29Document3 pagesAssignment 02 Mech495-202428CodingandScheduling29adelNo ratings yet
- Flow Shop SchedulingDocument16 pagesFlow Shop SchedulingJaideep SinghNo ratings yet
- Lecture-2 Flow Shop Scheduling Johnson's Method 22aug22Document29 pagesLecture-2 Flow Shop Scheduling Johnson's Method 22aug22motted groupNo ratings yet
- TI 6126 Scheduling Theory Flow Shop Scheduling (#7)Document36 pagesTI 6126 Scheduling Theory Flow Shop Scheduling (#7)SHERIN RAMADHANIANo ratings yet
- RV Robotic SMP HDLR Power Temp LLS Optics Fludics Other RoboticDocument1 pageRV Robotic SMP HDLR Power Temp LLS Optics Fludics Other RoboticfreedNo ratings yet
- CPC KarticaDocument12 pagesCPC KarticaJovan NikolicNo ratings yet
- CPSC-663: Real-Time Systems Common Scheduling ApproachesDocument9 pagesCPSC-663: Real-Time Systems Common Scheduling Approachesbhonde_ramNo ratings yet
- Hca 6 SceduleDocument3 pagesHca 6 SceduleMd. Tariqul Islam MunnaNo ratings yet
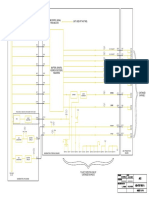
- Esquema Transmision CarraroDocument1 pageEsquema Transmision CarraroDavid Solis100% (1)
- Appendix 1: Table A.1.1 Car Arrival and Repair DataDocument59 pagesAppendix 1: Table A.1.1 Car Arrival and Repair DataitzgayaNo ratings yet
- Bilangan KompleksDocument35 pagesBilangan KompleksFandi WaldaniNo ratings yet
- Scheduling of Real-Time SystemsDocument20 pagesScheduling of Real-Time SystemsVarun Krishna ManneNo ratings yet
- Santosh V Hegde-2022HT01035-ESZG553 RTSDocument7 pagesSantosh V Hegde-2022HT01035-ESZG553 RTSsantosh vighneshwar hegdeNo ratings yet
- Cpu Scheduling 6 AlgosDocument18 pagesCpu Scheduling 6 AlgosRazzel MarasiganNo ratings yet
- Parts Reference ListDocument31 pagesParts Reference ListEddy KristianNo ratings yet
- Manufactring Mangement Project 2Document8 pagesManufactring Mangement Project 2Hazem ElbannaNo ratings yet
- Split PlotDocument1 pageSplit Plot02Sarah Aprilina NugrahenyNo ratings yet
- Khối OutputDocument1 pageKhối OutputNguyễn Hữu Thanh XuânNo ratings yet
- Riders PerformanceDocument3 pagesRiders PerformanceBarr Barani NataadiningratNo ratings yet
- Diagrama MixerDocument1 pageDiagrama MixerJaimeNo ratings yet
- Super G3 Fax Board AK1 PCDocument30 pagesSuper G3 Fax Board AK1 PCbloodkhantalNo ratings yet
- 14 Job Sequencing With Dead LnesDocument18 pages14 Job Sequencing With Dead Lnesthe477577No ratings yet
- Lecture 15 FSP PDFDocument7 pagesLecture 15 FSP PDFSrinivas KronosNo ratings yet
- 3K PDFDocument13 pages3K PDFFelipe QuindeNo ratings yet
- I4 T4 N1 S3 T6 T5 T8 T7 W1 W3 T1 P1 1:before Jun. 2011 Production 2:from Jun. 2011 ProductionDocument4 pagesI4 T4 N1 S3 T6 T5 T8 T7 W1 W3 T1 P1 1:before Jun. 2011 Production 2:from Jun. 2011 Productionalexander pintoNo ratings yet
- eMAX EP1501 Man REV - BDocument28 pageseMAX EP1501 Man REV - Bdube2012No ratings yet
- @4 - Assignment ProblemDocument32 pages@4 - Assignment ProblemHritika Reddy100% (1)
- 05 - Working Mechanics of The Taguchi Design of Experiments PDFDocument79 pages05 - Working Mechanics of The Taguchi Design of Experiments PDFgharba putraNo ratings yet
- 加拿大CPI公司 VZW2930FJ2-40 X射线诊断高压发生装置Document37 pages加拿大CPI公司 VZW2930FJ2-40 X射线诊断高压发生装置service iyadMedicalNo ratings yet
- Product CatalogueDocument44 pagesProduct CatalogueTo Van TinhNo ratings yet
- ProposalDocument2 pagesProposalSeerat ChishtiNo ratings yet
- Chap 1 A - PropositionsDocument44 pagesChap 1 A - Propositionsعمار الدلال100% (1)
- Speaker Testing Using AccelerometerDocument8 pagesSpeaker Testing Using Accelerometergama100% (1)
- Software Requirement SpecificationDocument10 pagesSoftware Requirement SpecificationAyush Agrawal0% (1)
- Kendriya Vidyalaya Sangathan Jaipur Region: Sample Question Paper (Term-I)Document7 pagesKendriya Vidyalaya Sangathan Jaipur Region: Sample Question Paper (Term-I)Samira FarooquiNo ratings yet
- Analysis of Ring Topology For NoC ArchitectureDocument8 pagesAnalysis of Ring Topology For NoC Architecture赵子杰No ratings yet
- A Covid-19 Based Temperature Detection and Contactless Attendance Monitoring System Using Iris RecognitionDocument18 pagesA Covid-19 Based Temperature Detection and Contactless Attendance Monitoring System Using Iris Recognitionshreya tripathiNo ratings yet
- Print 3Document2 pagesPrint 3Li ReNo ratings yet
- Fire Hose System Reports: Prepared byDocument13 pagesFire Hose System Reports: Prepared byaya maapNo ratings yet
- AOS-CX Switch Simulator - NetEdit 2.1 Part 4 Lab GuideDocument7 pagesAOS-CX Switch Simulator - NetEdit 2.1 Part 4 Lab Guidetest testNo ratings yet
- Alphabet Series Tricks - PDF: Intervals LikeDocument7 pagesAlphabet Series Tricks - PDF: Intervals LikeAbhishek A. NadgireNo ratings yet
- 2MW Platform BrochureDocument16 pages2MW Platform BrochureLeandro MagriNo ratings yet
- Tnteu-Icssr Paper List 803Document803 pagesTnteu-Icssr Paper List 803shahidafzalsyedNo ratings yet
- Risk Assesment - MobilisationDocument7 pagesRisk Assesment - Mobilisationشاز إياسNo ratings yet
- Schneider Indonesia April 13, 2005: Ge MultilinDocument40 pagesSchneider Indonesia April 13, 2005: Ge MultilinMarioNo ratings yet
- Urdu Sentiment Analysis Using Deep Learning: Department of Computer Science University of PeshawarDocument18 pagesUrdu Sentiment Analysis Using Deep Learning: Department of Computer Science University of PeshawarShamsul BasharNo ratings yet
- Marketing Strategy Dissertation ProposalDocument8 pagesMarketing Strategy Dissertation ProposalSparkles Soft75% (4)
- Comp Sc-Opt CbcsDocument47 pagesComp Sc-Opt CbcsShylesh B CNo ratings yet
- Assignment 4 Assn4 PDFDocument4 pagesAssignment 4 Assn4 PDFcybernerdNo ratings yet
- GSK N7 Controller Instruction Manual 6thDocument131 pagesGSK N7 Controller Instruction Manual 6thgdprabaNo ratings yet
- Getachew Yimer PDFDocument119 pagesGetachew Yimer PDFAmos Korme100% (1)
- Practical Research 2: January 2021Document12 pagesPractical Research 2: January 2021Marius Dave RodriguezNo ratings yet
- Dell EMCNetworking MXG610 S Spec SheetDocument4 pagesDell EMCNetworking MXG610 S Spec SheetmarvinreneNo ratings yet