You might also like
- OC CurveDocument5 pagesOC CurveAnonymous tv3qpx2No ratings yet
- Hidrograf Snyder-AlexeyevDocument17 pagesHidrograf Snyder-AlexeyevOlivia RahmaniarNo ratings yet
- Wind Load As Per IS875 Part III 2015Document7 pagesWind Load As Per IS875 Part III 2015subramanyaNo ratings yet
- 高量採樣器 - 流量校正Document3 pages高量採樣器 - 流量校正jackjack0402No ratings yet
- Retaining Wall StabilityDocument1 pageRetaining Wall StabilityZabihullah SafiNo ratings yet
- Ejemplo N 20Document1 pageEjemplo N 20Toby BobyNo ratings yet
- Perhitungan RWL Dan LIDocument4 pagesPerhitungan RWL Dan LINuurul ImanNo ratings yet
- QC Cal - BGDocument6 pagesQC Cal - BGsegedNo ratings yet
- M18 Levi3979 08 Ism C18Document33 pagesM18 Levi3979 08 Ism C18Li Kin LongNo ratings yet
- Retaining Wall-Stability CheckDocument1 pageRetaining Wall-Stability CheckRadhesh P ShenoyNo ratings yet
- Celestialworksheet RFDocument5 pagesCelestialworksheet RFHoài ThanhNo ratings yet
- Celestialworksheet RFDocument5 pagesCelestialworksheet RFHoài ThanhNo ratings yet
- Term Estimate STD Error T Ratio Prob - T - : Intercept 0.025106 0.007191 3.49 Time (S) 0.0001115 6.65E-05 1.68 0.11Document2 pagesTerm Estimate STD Error T Ratio Prob - T - : Intercept 0.025106 0.007191 3.49 Time (S) 0.0001115 6.65E-05 1.68 0.11GavanDusbabekNo ratings yet
- Seismic Analysis-Masonry Wall: SX SD X M Sumary Seismic Force On Masonry Wall SX 0.075 X 16.9kN 1.26kNDocument1 pageSeismic Analysis-Masonry Wall: SX SD X M Sumary Seismic Force On Masonry Wall SX 0.075 X 16.9kN 1.26kNpedjaNo ratings yet
- SEISMIC UBC97 v1.0Document15 pagesSEISMIC UBC97 v1.0hossamNo ratings yet
- Windloads ComputationDocument5 pagesWindloads ComputationmateojullieanneNo ratings yet
- EC8-zidani Zid Design Elastic Response Spectrum 1.1. Design Response SpectrumDocument1 pageEC8-zidani Zid Design Elastic Response Spectrum 1.1. Design Response SpectrumpedjaNo ratings yet
- Analisis SismicoDocument20 pagesAnalisis SismicoJose Mayner GarciaNo ratings yet
- PID ControlDocument38 pagesPID ControlInitial MNo ratings yet
- Hitung OC Trip TimeDocument5 pagesHitung OC Trip TimeWatu Gîlang KencanåNo ratings yet
- Wind Load Is 875Document21 pagesWind Load Is 875kedar sabharanjakNo ratings yet
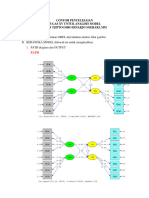
- DR Tjip Contoh Penyelesaian Analisis Model Soal IvDocument10 pagesDR Tjip Contoh Penyelesaian Analisis Model Soal IvTiara KemalaNo ratings yet
- محاسبات دیگ مارست حامد شریفیDocument2 pagesمحاسبات دیگ مارست حامد شریفیhamed ShNo ratings yet
- CFA SO Data Var ACHDocument7 pagesCFA SO Data Var ACHDogol HarjonoNo ratings yet
- Ice Cream ConsumptionDocument10 pagesIce Cream Consumptionyafoor04No ratings yet
- Annexure-1 Wind Load ReportDocument4 pagesAnnexure-1 Wind Load ReportPrabartak DasNo ratings yet
- SPEC-DMM7510B Oct 2016 0Document25 pagesSPEC-DMM7510B Oct 2016 0SantonioNo ratings yet
- PERHITUNGANDocument10 pagesPERHITUNGANmufidah mawaddahNo ratings yet
- PD QC 02Document2 pagesPD QC 02surangkanapukwarnNo ratings yet
- Pid 1Document17 pagesPid 1tanujmistryNo ratings yet
- Hypothesis Test: Independent Groups (T-Test, Pooled Variance)Document11 pagesHypothesis Test: Independent Groups (T-Test, Pooled Variance)Jaque PecuaNo ratings yet
- Kalibrasi Termometer 1: B o D o B o D oDocument10 pagesKalibrasi Termometer 1: B o D o B o D oIqbal Chadels BerryNo ratings yet
- A Circular Sewer Having A Slope of 0Document13 pagesA Circular Sewer Having A Slope of 0Kaila SalemNo ratings yet
- Kalibrasi HvasDocument1 pageKalibrasi HvasLangganan AjaNo ratings yet
- Lab 4 Experiment On CoolingDocument7 pagesLab 4 Experiment On CoolingDivnesh KumarNo ratings yet
- Eviews OutputDocument6 pagesEviews OutputJara EscobidoNo ratings yet
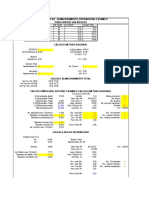
- Anexo Calculo de Almacenamiento, Distribución Y Bombeo para Edificio San NicolasDocument4 pagesAnexo Calculo de Almacenamiento, Distribución Y Bombeo para Edificio San NicolasDayana GomezNo ratings yet
- Setting CalculatorDocument15 pagesSetting CalculatorPARTHIBANNo ratings yet
- Tutorial Sol CH 8Document6 pagesTutorial Sol CH 8Abraham wisdomNo ratings yet
- Feedback Control - On Off & PIDDocument20 pagesFeedback Control - On Off & PIDRizaldi MaulanaNo ratings yet
- Analiza OpterecenjaDocument44 pagesAnaliza OpterecenjaMilosNo ratings yet
- V. Data PengamatanDocument5 pagesV. Data PengamatanMuhamadBarkahDarajatNo ratings yet
- Flowrate Correction FactorDocument11 pagesFlowrate Correction FactorMuhammadNo ratings yet
- Nur Fadillah (21613293) - Exercise 2 (Farmakokinetik Dasar)Document5 pagesNur Fadillah (21613293) - Exercise 2 (Farmakokinetik Dasar)NUR FADILLAH -No ratings yet
- Markov Chain Example: Personnel ModelingDocument22 pagesMarkov Chain Example: Personnel ModelingKushal ShNo ratings yet
- Path ALL GabungDocument5 pagesPath ALL GabungDogol HarjonoNo ratings yet
- Fakulti Kejuruteraan Kimia Chemical Process Control (CPE501) Universiti Teknologi MaraDocument10 pagesFakulti Kejuruteraan Kimia Chemical Process Control (CPE501) Universiti Teknologi MaraSh. Hannan AinaNo ratings yet
- Exp2 ObervationDocument7 pagesExp2 ObervationKAMAL HAASANNo ratings yet
- Exp2 RecordDocument9 pagesExp2 RecordKAMAL HAASANNo ratings yet
- From December To June (Roshan)Document83 pagesFrom December To June (Roshan)Roshan DhakalNo ratings yet
- Assignment 1 Engineering Measurement Anandababu N PDFDocument14 pagesAssignment 1 Engineering Measurement Anandababu N PDFEdwin Yugcha100% (1)
- CSTR Unit Ops LabDocument7 pagesCSTR Unit Ops LabKelly Sheine SisonNo ratings yet
- Calculo de Esfuerzos EfectivosDocument4 pagesCalculo de Esfuerzos EfectivosMarlon SaulNo ratings yet
- Draft For T-1Document33 pagesDraft For T-1Gabby GalvezNo ratings yet
- Hasil Percobaan HidrometerDocument6 pagesHasil Percobaan HidrometerAkhmad SyarNo ratings yet
- Demo Rockwell Certificate ASTMDocument7 pagesDemo Rockwell Certificate ASTMYAMA ENGINEERSNo ratings yet
- Wind Pressure Calculation AREA 2 FinalDocument30 pagesWind Pressure Calculation AREA 2 FinalAnkit BhadolaNo ratings yet