You might also like
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- Implementation and Performance Evaluation of A Fast Dynamic Control Scheme For Capacitor-Supported Interline DVRDocument14 pagesImplementation and Performance Evaluation of A Fast Dynamic Control Scheme For Capacitor-Supported Interline DVRRamphani NunnaNo ratings yet
- Power Synchronization Contol of Grid-Connected Voltage-Source ConvertersDocument12 pagesPower Synchronization Contol of Grid-Connected Voltage-Source ConvertersKhirodModiNo ratings yet
- It Is Quite Another Electricity: Transmitting by One Wire and Without GroundingFrom EverandIt Is Quite Another Electricity: Transmitting by One Wire and Without GroundingRating: 4.5 out of 5 stars4.5/5 (2)
- A High-Efficiency 6.78-Mhz Full Active Rectifier With Adaptive Time Delay Control For Wireless Power TransmissionDocument10 pagesA High-Efficiency 6.78-Mhz Full Active Rectifier With Adaptive Time Delay Control For Wireless Power Transmissionfelix_007_villedaNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Maritime Link The First Bipolar VSC HVDC With Overhead Line: O. Vestergaard P. LundbergDocument4 pagesMaritime Link The First Bipolar VSC HVDC With Overhead Line: O. Vestergaard P. LundbergDaniel Adolfo Medina CarvajalNo ratings yet
- Cascade Controller For DCDC Buck ConvertorDocument6 pagesCascade Controller For DCDC Buck ConvertorCristóbal Eduardo Carreño MosqueiraNo ratings yet
- HVDC Converter Stations Control and LayoutDocument2 pagesHVDC Converter Stations Control and LayoutMohammed el amine OUARASNo ratings yet
- Design Considerations of A Fault Current Limiting Dynamic Voltage Restorer FCL-DVRDocument12 pagesDesign Considerations of A Fault Current Limiting Dynamic Voltage Restorer FCL-DVRKorhan KaraarslanNo ratings yet
- On The Black Start of Offshore Wind Power Plants With Diode Rectifier BasedDocument10 pagesOn The Black Start of Offshore Wind Power Plants With Diode Rectifier Basednabilhoque601No ratings yet
- CliP University of CataniaDocument6 pagesCliP University of CataniaUsman MohsinNo ratings yet
- REAL-TIME CONTROL AND PROTECTION OF THE NEPTUNE POWER SYSTEMDocument10 pagesREAL-TIME CONTROL AND PROTECTION OF THE NEPTUNE POWER SYSTEMSreekanth ReddyNo ratings yet
- ANPC-5L Technology Applied To Medium Voltage Variable Speed Drives ApplicationsDocument8 pagesANPC-5L Technology Applied To Medium Voltage Variable Speed Drives ApplicationsRen Hong GiangNo ratings yet
- Optimal Control Design For VSC-HVDC SystemsDocument6 pagesOptimal Control Design For VSC-HVDC SystemschmvsrNo ratings yet
- Validation of Power Plant Transformers Re-Energization Schemes in Case of Black-Out by Comparison Between Studies and Field Tests MeasurementsDocument6 pagesValidation of Power Plant Transformers Re-Energization Schemes in Case of Black-Out by Comparison Between Studies and Field Tests MeasurementsBožidar Filipović-GrčićNo ratings yet
- High-Efficiency, Grid-Tie Inverter For Photovoltaic ApplicationsDocument8 pagesHigh-Efficiency, Grid-Tie Inverter For Photovoltaic ApplicationsAlex TrubitsynNo ratings yet
- A Novel Ultrafast Transient Constant on-Time Buck Converter for Multiphase OperationDocument11 pagesA Novel Ultrafast Transient Constant on-Time Buck Converter for Multiphase OperationzzhbpainNo ratings yet
- A Novel AC To AC Wireless Power Transfer SystemDocument6 pagesA Novel AC To AC Wireless Power Transfer Systemarunkumarmurugesan88No ratings yet
- AbstractDocument5 pagesAbstractDarshit VyasNo ratings yet
- SCR IjepesDocument11 pagesSCR IjepeskarthikeyanNo ratings yet
- 2008 Braun EwecDocument10 pages2008 Braun EwecfarzanesunflowerNo ratings yet
- Marchesoni1992 PDFDocument16 pagesMarchesoni1992 PDFNazmul IslamNo ratings yet
- Improved Secondary and New Tertiary Voltage Control: WM PwrsDocument12 pagesImproved Secondary and New Tertiary Voltage Control: WM PwrsJavier VargasNo ratings yet
- DC Link Voltage Control of Back-To-Back ConverterDocument6 pagesDC Link Voltage Control of Back-To-Back ConverterRoshan PradhanNo ratings yet
- SFCC For The Smart GridDocument4 pagesSFCC For The Smart GridAkhilesh PanwarNo ratings yet
- Power ElectronicsDocument27 pagesPower ElectronicsAnand Pon KumarNo ratings yet
- Clave Libretamilitar ComDocument9 pagesClave Libretamilitar ComyesidNo ratings yet
- A New Proposal For Power Quality and CustomDocument10 pagesA New Proposal For Power Quality and CustomChetan SoniNo ratings yet
- MVDC Voltage MultiplierDocument6 pagesMVDC Voltage Multiplierahmedallehyani5aNo ratings yet
- Control of Simplified Multilevel AC-DC-AC Converter For Small Power Generation SystemsDocument6 pagesControl of Simplified Multilevel AC-DC-AC Converter For Small Power Generation SystemsAstrid BelloNo ratings yet
- On Neural Notwork Hfeurel-200T: System'SDocument5 pagesOn Neural Notwork Hfeurel-200T: System'SJavier VargasNo ratings yet
- Ref 1 Power Transfer Capability and Bifurcation Phenomena of Loosely Coupled Inductive Power Transfer SystemsDocument10 pagesRef 1 Power Transfer Capability and Bifurcation Phenomena of Loosely Coupled Inductive Power Transfer SystemsaffifaghaniNo ratings yet
- Grid-Connected PV System with FPGA-Based Power Factor Control and Islanding DetectionDocument4 pagesGrid-Connected PV System with FPGA-Based Power Factor Control and Islanding Detectionatam azerNo ratings yet
- WP AdaptiveCellTopologyDocument6 pagesWP AdaptiveCellTopologyManu MathewNo ratings yet
- Advantages of HVDC Over HVAC Transmission - EEPDocument5 pagesAdvantages of HVDC Over HVAC Transmission - EEPBattinapati ShivaNo ratings yet
- 27 Design and Implementation of A Sensorless Multilevel InverterDocument7 pages27 Design and Implementation of A Sensorless Multilevel Inverterknighthood4allNo ratings yet
- DC Transmission Based On Voltage Source ConvertersDocument10 pagesDC Transmission Based On Voltage Source ConvertersadfrdoNo ratings yet
- IEE CRFuerte Acha UPFCDocument8 pagesIEE CRFuerte Acha UPFCGrettel QuintanaNo ratings yet
- Control of Systems : Electric PowerDocument13 pagesControl of Systems : Electric PowerEric HernandezNo ratings yet
- 3 - A - Novel - Nine-Level - Inverter - Employing - One - Voltage - Source - and - Reduced - Components - As - High-Frequency - AC - Power - SourceDocument9 pages3 - A - Novel - Nine-Level - Inverter - Employing - One - Voltage - Source - and - Reduced - Components - As - High-Frequency - AC - Power - Sourcer.ebrahimi1993No ratings yet
- Integration of A Hydraulic Production Plant in A Weak Power System On A Long Radial LineDocument6 pagesIntegration of A Hydraulic Production Plant in A Weak Power System On A Long Radial LineRathinam AnathanarayananNo ratings yet
- 2Document21 pages2Anand Pon KumarNo ratings yet
- Facts 1Document5 pagesFacts 1Sandun LakminaNo ratings yet
- Goksu 2014Document9 pagesGoksu 2014Jesus Flores HuamanNo ratings yet
- On The Stability of Volts-per-Hertz Control For Induction MotorsDocument10 pagesOn The Stability of Volts-per-Hertz Control For Induction Motorsm tpNo ratings yet
- An Electromagnetic Transient Simulation Model ForDocument4 pagesAn Electromagnetic Transient Simulation Model ForMohit Kumar ChowdaryNo ratings yet
- Voltage RiseDocument8 pagesVoltage RisechethanNo ratings yet
- Project FC 1Document8 pagesProject FC 1Patata PatatonaNo ratings yet
- Designing Self-Contingent HVDC Systems With The AC GridDocument4 pagesDesigning Self-Contingent HVDC Systems With The AC GridCampNo ratings yet
- Subsea High Voltage Power DistributionDocument9 pagesSubsea High Voltage Power DistributionSeun Sam AdetolaNo ratings yet
- Overhead Transmission Line Monitoring System in Croatian Power GridDocument10 pagesOverhead Transmission Line Monitoring System in Croatian Power GridDayan YasarangaNo ratings yet
- 1102R PDFDocument5 pages1102R PDFElhindi hatimNo ratings yet
- 1102R PDFDocument5 pages1102R PDFElhindi hatimNo ratings yet
- Impact of Large Offshore Wind Farms On Power System Transient StabilityDocument8 pagesImpact of Large Offshore Wind Farms On Power System Transient StabilityMadhusudhan SrinivasanNo ratings yet
- Real-time digital simulation of offshore wind farm connectionsDocument7 pagesReal-time digital simulation of offshore wind farm connectionspreeti200726No ratings yet
- Multilevel Buck/Boost-Type DC-DC Converter For High-Power and High-Voltage ApplicationDocument12 pagesMultilevel Buck/Boost-Type DC-DC Converter For High-Power and High-Voltage ApplicationVijaymahantesh SurkodNo ratings yet
- Trans Part2Document20 pagesTrans Part2eagles1109No ratings yet
- Nceee2012 AdamsecDocument6 pagesNceee2012 AdamseckiranNo ratings yet
- Calculation of Step and Touch PotentialDocument10 pagesCalculation of Step and Touch PotentialMeenakumari RamachandranNo ratings yet
- Power System GroundingsDocument10 pagesPower System Groundingsmilan9bNo ratings yet
- Owner's Manual: Protect It! Traveler In-Line Surge SuppressorsDocument1 pageOwner's Manual: Protect It! Traveler In-Line Surge SuppressorsamaytaNo ratings yet
- 1LAC000003 DistTrHandbookDocument92 pages1LAC000003 DistTrHandbookkastanis_3No ratings yet
- Low Cost Solar Electric PowerDocument186 pagesLow Cost Solar Electric PowerwavestarNo ratings yet
- ElectricalMachinesbyS K Sahdev-1 PDFDocument980 pagesElectricalMachinesbyS K Sahdev-1 PDFCric Cric100% (2)
- D.C Motors Multiple Choice Questions and Answers Preparation For Competition Exams PDFDocument16 pagesD.C Motors Multiple Choice Questions and Answers Preparation For Competition Exams PDFsalman bhattiNo ratings yet
- BL2 & BL4 DriverDocument68 pagesBL2 & BL4 DriverVasuPatelNo ratings yet
- Grundfosliterature 5235376Document54 pagesGrundfosliterature 5235376ArieWahyuWidodoNo ratings yet
- 0010R - COCont - Document3 (Electrical Portion) PDFDocument181 pages0010R - COCont - Document3 (Electrical Portion) PDFPrasadNo ratings yet
- ATPL ElectronicsDocument188 pagesATPL ElectronicsAli Abdallah100% (5)
- Proforma Invoice 18-01-2022cDocument3 pagesProforma Invoice 18-01-2022cNIMINo ratings yet
- ETEC 4931 Electricity Systems: Electrical Symbols and TerminologyDocument23 pagesETEC 4931 Electricity Systems: Electrical Symbols and TerminologyAisya Patel100% (2)
- Vacon NX Service Manual Appendix FR9Document96 pagesVacon NX Service Manual Appendix FR9Hari Krishna.M100% (1)
- Eracs BrochureDocument4 pagesEracs BrochureRahul SharmaNo ratings yet
- Vickers Servo ValveDocument28 pagesVickers Servo ValveHitesh MehtaNo ratings yet
- Form Compatibilities and ConfigurationDocument46 pagesForm Compatibilities and ConfigurationChristian EstebanNo ratings yet
- 66 KV Substation Getco RanasanDocument7 pages66 KV Substation Getco RanasanDivyanshu Agarwal100% (1)
- APC Smart-UPS SRT 2200VA 230V: Technical SpecificationsDocument3 pagesAPC Smart-UPS SRT 2200VA 230V: Technical SpecificationsBrian TumwesigyeNo ratings yet
- Data Sheet: PG150R PG1510RDocument2 pagesData Sheet: PG150R PG1510RJOHN BRICCO A. MATACSILNo ratings yet
- Manage overdue electricity bill onlineDocument1 pageManage overdue electricity bill onlineRajesh KumarNo ratings yet
- 1 DC Power SupplyDocument33 pages1 DC Power Supplyapolloroka33% (3)
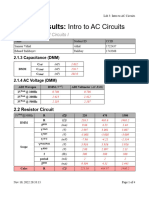
- Lab 3Document4 pagesLab 3Caramel KarebearNo ratings yet
- 11 Cell Stack Replacement: HOGEN® H Series Hydrogen Generator Service ManualDocument3 pages11 Cell Stack Replacement: HOGEN® H Series Hydrogen Generator Service ManualMayur GuptaNo ratings yet
- Technical Particular and GuaranteeDocument2 pagesTechnical Particular and Guaranteeemailsepamku gorgom100% (2)
- Instruction Manual: Simrad RI9 Rudder Angle IndicatorDocument34 pagesInstruction Manual: Simrad RI9 Rudder Angle Indicatorkevin ayolaNo ratings yet
- Db3 Tontabell InstallationDocument5 pagesDb3 Tontabell InstallationgrenjithNo ratings yet
- 01 DAMEN HandBook 59 - 20061006Document31 pages01 DAMEN HandBook 59 - 20061006StefanitaNo ratings yet
- 213Document67 pages213baoHVLAB100% (1)
- User Manual Auto-Reclosing ProtectorDocument8 pagesUser Manual Auto-Reclosing ProtectorThiago GusmãoNo ratings yet
- Jain Drip KitDocument4 pagesJain Drip Kitanishb97No ratings yet
- High Voltage Direct Current (HVDC) Transmission Line SystemDocument30 pagesHigh Voltage Direct Current (HVDC) Transmission Line SystemzakiNo ratings yet
- SEO-OPTIMIZED TITLEDocument40 pagesSEO-OPTIMIZED TITLEravigupt2100% (1)
- Diodes Clipping and Clamping Circuits ExperimentDocument15 pagesDiodes Clipping and Clamping Circuits ExperimentAyeshaNo ratings yet
- Voltage Regulator DatasheetDocument6 pagesVoltage Regulator DatasheetSteveNo ratings yet
- Abb DriveDocument3 pagesAbb DriveShatrughna SamalNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Power Quality in Power Systems and Electrical MachinesFrom EverandPower Quality in Power Systems and Electrical MachinesRating: 4.5 out of 5 stars4.5/5 (11)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Complete Electronics Self-Teaching Guide with ProjectsFrom EverandComplete Electronics Self-Teaching Guide with ProjectsRating: 3 out of 5 stars3/5 (2)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Foundations of Western Civilization II: A History of the Modern Western World (Transcript)From EverandFoundations of Western Civilization II: A History of the Modern Western World (Transcript)Rating: 4.5 out of 5 stars4.5/5 (12)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Winning in 2025: Digital and Data Transformation: The Keys to SuccessFrom EverandWinning in 2025: Digital and Data Transformation: The Keys to SuccessNo ratings yet
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)