You might also like
- Complete Logic Notes 2Document34 pagesComplete Logic Notes 2Ariel MorgensternNo ratings yet
- SPA5304 Physical Dynamics: 1.1 Example: The Planar PendulumDocument7 pagesSPA5304 Physical Dynamics: 1.1 Example: The Planar PendulumRoy VeseyNo ratings yet
- Generalized Quotient TopologiesDocument6 pagesGeneralized Quotient Topologiesaqsamughal612No ratings yet
- Lecture 10Document4 pagesLecture 10ChammiNo ratings yet
- Actualist LogicDocument5 pagesActualist Logicthrygater.eridosNo ratings yet
- P D D D ZDocument39 pagesP D D D ZSanat SharmaNo ratings yet
- Deflections Under LoadingDocument21 pagesDeflections Under Loadingismail.as72No ratings yet
- 7 Homomorphisms and The First Isomorphism TheoremDocument8 pages7 Homomorphisms and The First Isomorphism TheoremKrishnendu RarhiNo ratings yet
- MAS 305 Algebraic Structures II: Notes 3 Autumn 2006Document9 pagesMAS 305 Algebraic Structures II: Notes 3 Autumn 2006MarlydTalakuaNo ratings yet
- Log-Gamma Polymer Free Energy Fluctuations Via A Fredholm Determinant Identity. Alexei Borodin, Ivan Corwin and Daniel Remenik.Document15 pagesLog-Gamma Polymer Free Energy Fluctuations Via A Fredholm Determinant Identity. Alexei Borodin, Ivan Corwin and Daniel Remenik.GIANCARLOS ALBERTO OVIEDO VALVERDENo ratings yet
- Def Quant AT1997Document7 pagesDef Quant AT1997Huong Cam ThuyNo ratings yet
- Lecture XXXIII: Lagrangian Formulation of GR: Caltech M/C 350-17, Pasadena CA 91125, USA (Dated: April 27, 2012)Document6 pagesLecture XXXIII: Lagrangian Formulation of GR: Caltech M/C 350-17, Pasadena CA 91125, USA (Dated: April 27, 2012)David DiazNo ratings yet
- On The Generalized Lognormal Distribution: T. L. Toulias and C. P. KitsosDocument27 pagesOn The Generalized Lognormal Distribution: T. L. Toulias and C. P. KitsosRaymath BenNo ratings yet
- Bent Surfaces 2Document21 pagesBent Surfaces 2tackyjcNo ratings yet
- Isomorphism TheoremsDocument33 pagesIsomorphism TheoremsEric RonquilloNo ratings yet
- 1703 05447Document27 pages1703 05447Huong Cam ThuyNo ratings yet
- CH 10Document4 pagesCH 10SantiagoNo ratings yet
- Short Intro To TF Chaudouard PDFDocument24 pagesShort Intro To TF Chaudouard PDFGV Nguyen ChuNo ratings yet
- A Formal Introduction To Horndeski and GalileonDocument19 pagesA Formal Introduction To Horndeski and GalileonThanasis BakopoulosNo ratings yet
- Introduction To Lie Groups - Vorlesungs-Script: Prof. A. Iozzi October 19, 2008Document92 pagesIntroduction To Lie Groups - Vorlesungs-Script: Prof. A. Iozzi October 19, 2008mikehannayNo ratings yet
- Dubtsov 2007Document7 pagesDubtsov 2007RagNo ratings yet
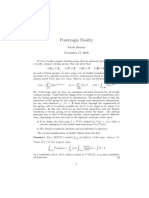
- Pontrayagin DualityDocument4 pagesPontrayagin Dualityjd_jakeNo ratings yet
- NotesDocument9 pagesNotesjayashreeNo ratings yet
- The Three Sigma Rule: WWW - Uni-Augsburg - De/pukelsheim/1994b PDFDocument10 pagesThe Three Sigma Rule: WWW - Uni-Augsburg - De/pukelsheim/1994b PDFMuhammad IqwanNo ratings yet
- Chapter Three: 3.2 Legendre Equation and Legendre PolynomialsDocument73 pagesChapter Three: 3.2 Legendre Equation and Legendre PolynomialsPatrick SibandaNo ratings yet
- Sol 2Document3 pagesSol 2laura.bianca.biliusNo ratings yet
- 1 - Detk,,) Iti2 S&T A, (+A .: XJ X+ X), A, Eyx) ODocument3 pages1 - Detk,,) Iti2 S&T A, (+A .: XJ X+ X), A, Eyx) OPatrick WongNo ratings yet
- F 14 M 240 AnotesDocument94 pagesF 14 M 240 AnotesSweta AkhoriNo ratings yet
- A Characterization of Fourier Transforms: To Cite This VersionDocument13 pagesA Characterization of Fourier Transforms: To Cite This VersionVijayakumar KNo ratings yet
- Normal Bases and Primitive Elements Over Finite FieldsDocument26 pagesNormal Bases and Primitive Elements Over Finite FieldsGiorgos KapetanakisNo ratings yet
- An Introduction To Flag Manifolds Notes For The Summer School On Combinatorial Models in Geometry and Topology of Flag Manifolds, Regina 2007Document30 pagesAn Introduction To Flag Manifolds Notes For The Summer School On Combinatorial Models in Geometry and Topology of Flag Manifolds, Regina 2007fasdfasdfNo ratings yet
- Lecture 3Document27 pagesLecture 3Axel Coronado PopperNo ratings yet
- SchwarzschildSolution PDFDocument9 pagesSchwarzschildSolution PDFSreerag S KumarNo ratings yet
- Normal Families New PerspectivesDocument17 pagesNormal Families New Perspectiveswilliam DNo ratings yet
- A Tutorial On Proof Theoretic Foundations of Logic ProgrammingDocument19 pagesA Tutorial On Proof Theoretic Foundations of Logic ProgrammingRohit SorenNo ratings yet
- Sol 12Document3 pagesSol 12Julio César GalindoNo ratings yet
- Chap 4Document42 pagesChap 4Arthur StivanelloNo ratings yet
- CurvedDocument1 pageCurvedAyub FaridiNo ratings yet
- Research '98Document9 pagesResearch '98victimforspam57No ratings yet
- Cuckler-Kahn2009 Article EntropyBoundsForPerfectMatchinDocument9 pagesCuckler-Kahn2009 Article EntropyBoundsForPerfectMatchinjohnoftheroadNo ratings yet
- Image Reconstruction For Fan Beam X-Ray Tomography Using General Hankel Transform PairDocument18 pagesImage Reconstruction For Fan Beam X-Ray Tomography Using General Hankel Transform PairChim RuồiNo ratings yet
- Solution Set 1 Classical Worldsheet Dynamics: Problems 1-4 Are Due To Marty HalpernDocument13 pagesSolution Set 1 Classical Worldsheet Dynamics: Problems 1-4 Are Due To Marty HalpernGerman ChiappeNo ratings yet
- Wang 2012Document6 pagesWang 2012SophiaNo ratings yet
- Boundary Conformal Field TheoryDocument17 pagesBoundary Conformal Field TheorySanchita SharmaNo ratings yet
- Introduction Small Divisors 0009232v1Document91 pagesIntroduction Small Divisors 0009232v1st_marmiNo ratings yet
- DaejeonDocument31 pagesDaejeonKedarNo ratings yet
- QMAT21Document33 pagesQMAT21KedarNo ratings yet
- Ilovepdf MergedDocument23 pagesIlovepdf MergedJalfrazee KormaNo ratings yet
- Homework 1-3 PDFDocument3 pagesHomework 1-3 PDFivan david alvarez herreraNo ratings yet
- Lectures of Lapid-1Document4 pagesLectures of Lapid-1math teacherNo ratings yet
- FTrans RescaleDocument2 pagesFTrans RescaleAlok PradhanNo ratings yet
- Zuber CFT LecturesDocument36 pagesZuber CFT LecturesguilleasilvaNo ratings yet
- Module-5: Constitutive Relations: Lecture-38: Thermomechanics of FluidsDocument7 pagesModule-5: Constitutive Relations: Lecture-38: Thermomechanics of FluidsKevin Henoc AYINo ratings yet
- Energy Levels of Classical Interacting Fields in A Finite Domain in 1 + 1 DimensionDocument20 pagesEnergy Levels of Classical Interacting Fields in A Finite Domain in 1 + 1 DimensionLev LandauNo ratings yet
- Gravitational Phase Transitions and The Sine-Gordon ModelDocument23 pagesGravitational Phase Transitions and The Sine-Gordon Modelwalter huNo ratings yet
- Solution To Problem 4.5, Mandl-ShawDocument4 pagesSolution To Problem 4.5, Mandl-ShawMikael Souto MaiorNo ratings yet
- D4-Pure - (Anti-) De-Sitter-Supergravity RevisitedDocument39 pagesD4-Pure - (Anti-) De-Sitter-Supergravity RevisitedTuấn Nguyễn AnhNo ratings yet
- Sym Top and OscillationsDocument19 pagesSym Top and OscillationsJYOTIPRAKASH SATAPATHYNo ratings yet
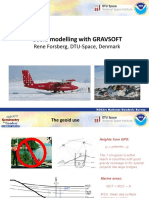
- 2forsberg GRAVSOFT Geoid PDFDocument57 pages2forsberg GRAVSOFT Geoid PDFyapbengchuanNo ratings yet
- Modern Science and Guénonian CritiqueDocument1 pageModern Science and Guénonian CritiqueIbrahima SakhoNo ratings yet
- Medieval Cosmology Plato Aristotle and CDocument6 pagesMedieval Cosmology Plato Aristotle and CPedroNo ratings yet
- Nasr, Seyyed Hossein - Religion and The Order of Nature, The 1994 Cadbury Lectures at The University of Birmingham (1996)Document319 pagesNasr, Seyyed Hossein - Religion and The Order of Nature, The 1994 Cadbury Lectures at The University of Birmingham (1996)fernandes soares100% (2)
- Jean Borella - The Crisis of Religious Symbolism and Symbolism & RealityDocument439 pagesJean Borella - The Crisis of Religious Symbolism and Symbolism & RealityFelipeFlamelNo ratings yet
- Weak EmergenceDocument28 pagesWeak EmergenceSimonCliffNo ratings yet
- Burtt, The Metaphysical Foundations of Modern Science PDFDocument370 pagesBurtt, The Metaphysical Foundations of Modern Science PDFjkorentayer67% (3)
- Unity of Opposites DialecticDocument28 pagesUnity of Opposites Dialecticjayemcee2No ratings yet
- (Boston Studies in The Philosophy of Science 277) Paul Needham (Auth.), Paul Needham (Eds.) - Commentary On The Principles of Thermodynamics by Pierre Duhem-Springer Netherlands (2011)Document232 pages(Boston Studies in The Philosophy of Science 277) Paul Needham (Auth.), Paul Needham (Eds.) - Commentary On The Principles of Thermodynamics by Pierre Duhem-Springer Netherlands (2011)PedroNo ratings yet
- Nature MathematizedDocument329 pagesNature MathematizedPedroNo ratings yet
- The Concept of Creatnity in Science and ArtDocument216 pagesThe Concept of Creatnity in Science and ArtPedroNo ratings yet
- (Context and Content) Herman Cappelen, Josh Dever - The Inessential Indexical - On The Philosophical Insignificance of Perspective and The First Person-Oxford University Press (2014) PDFDocument209 pages(Context and Content) Herman Cappelen, Josh Dever - The Inessential Indexical - On The Philosophical Insignificance of Perspective and The First Person-Oxford University Press (2014) PDFAnonymous HN6JfxNo ratings yet
- Barcan 1946 - A Functional Calculus of First Order Based On Strict ImplicationDocument17 pagesBarcan 1946 - A Functional Calculus of First Order Based On Strict ImplicationandersonroloffNo ratings yet
- Logical EquivalenceDocument54 pagesLogical EquivalenceBreech EdubasNo ratings yet
- Cignoli, Mundici-Algebraic Foundations of Many-Valued Reasoning PDFDocument235 pagesCignoli, Mundici-Algebraic Foundations of Many-Valued Reasoning PDFMarisol ArroyaveNo ratings yet
- 2019 Mathg8q3 PDFDocument303 pages2019 Mathg8q3 PDFMarlon Canlas MartinezNo ratings yet
- Proof Part 3 ContradictionDocument4 pagesProof Part 3 ContradictionChing Wen WongNo ratings yet
- Lec 5Document3 pagesLec 5Junaid AkramNo ratings yet
- Mathematics and Symbolic Logic (Students Material & Assignment)Document15 pagesMathematics and Symbolic Logic (Students Material & Assignment)DAVID ABDULSHUAIB AYEDUN100% (1)
- Boolean Operators Literature ReviewDocument8 pagesBoolean Operators Literature Reviewc5qz47sm100% (1)
- MMW Worksheet 2.5-The Laguage of LogicDocument6 pagesMMW Worksheet 2.5-The Laguage of LogicZoren Divina BorretaNo ratings yet
- AI CH 4Document69 pagesAI CH 4Antehun asefaNo ratings yet
- All SlidesDocument157 pagesAll SlidesAbu HurairaNo ratings yet
- Truth TableDocument21 pagesTruth TableJenyNo ratings yet
- Logic Notes - MAT2EB1Document36 pagesLogic Notes - MAT2EB1Kgopotso MaponyaNo ratings yet
- Predicate LogicDocument48 pagesPredicate LogicNitin PritwaniNo ratings yet
- Linear Algebra I (Lecture Notes) - Peter PhilipDocument234 pagesLinear Algebra I (Lecture Notes) - Peter Philipvic1234059No ratings yet
- Chapter One Propositional Logic and Set TheoryDocument38 pagesChapter One Propositional Logic and Set TheorySemir HamidNo ratings yet
- Practice Problems Week 7Document4 pagesPractice Problems Week 7api-479141525No ratings yet
- DM Ma8351 U1Document83 pagesDM Ma8351 U1Preethi PadmanabanNo ratings yet
- Propositional LogicDocument26 pagesPropositional LogicAtheerNo ratings yet
- 2 PDFDocument83 pages2 PDFvel muruganNo ratings yet
- Logic and Methods of ProofDocument40 pagesLogic and Methods of ProofLADYRODELA QUIBODNo ratings yet
- SeminarreportDocument15 pagesSeminarreportEleni maruNo ratings yet
- BSACC 4 Elementary Logic and Problem SolvingDocument21 pagesBSACC 4 Elementary Logic and Problem Solvingkaye gozunNo ratings yet
- Chellas ModalLogicDocument305 pagesChellas ModalLogicprooftheory100% (4)
- Eoc 1Document3 pagesEoc 1PRAAVIEEN RAJJNo ratings yet
- Ekuivalen LogisDocument5 pagesEkuivalen LogisRendy B. SuharsonoNo ratings yet
- Constructing Truth Tables: General Mathematics ProgramDocument24 pagesConstructing Truth Tables: General Mathematics ProgramTHe Study HallNo ratings yet
- AI UNIT-3 Knowledge RepresentationDocument58 pagesAI UNIT-3 Knowledge RepresentationPriyansh Gupta100% (1)
- LecturesDocument12 pagesLecturesRider rogueNo ratings yet
- DMS MCQ'SDocument10 pagesDMS MCQ'SSumit TileNo ratings yet