100% found this document useful (3 votes)
306 views34 pagesPID Controller Fundamentals and Applications
The document discusses different types of feedback controllers used in process control loops, including proportional (P), proportional-integral (PI), and proportional-integral-derivative (PID) controllers. It explains how each type of controller works, including how they calculate their output based on the error between the setpoint and measured process variable. It also covers concepts like controller gain, proportional band, direct vs reverse action, and the advantages and disadvantages of P, PI, and PID control.
Uploaded by
Mohd AizadCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
100% found this document useful (3 votes)
306 views34 pagesPID Controller Fundamentals and Applications
The document discusses different types of feedback controllers used in process control loops, including proportional (P), proportional-integral (PI), and proportional-integral-derivative (PID) controllers. It explains how each type of controller works, including how they calculate their output based on the error between the setpoint and measured process variable. It also covers concepts like controller gain, proportional band, direct vs reverse action, and the advantages and disadvantages of P, PI, and PID control.
Uploaded by
Mohd AizadCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
- Introduction
- Process Control Loop
- Feedback Controllers
- Action of Controllers
- Type of Feedback Controllers
- Conventional Block Diagram Representation
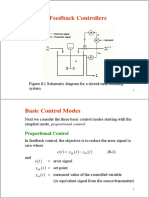
- Proportional Control
- Integral Control
- Derivative Control
- Proportional-Integral-Derivative (PID) Control
- Controller Comparison
- Feedback Control Systems Response
- Application Questions