100% found this document useful (2 votes)
610 views35 pagesFeedback Controllers Overview
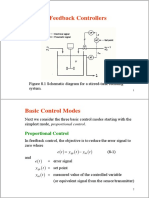
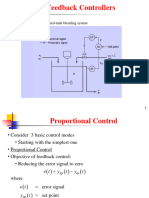
This document provides an overview of feedback controllers, including:
1. It explains the basic concepts of proportional (P), integral (I), and derivative (D) controllers and how they work individually and together in PID controllers.
2. It discusses the advantages and disadvantages of P, PI, and PID controllers and how they reduce errors and improve stability in feedback control systems.
3. It provides examples of how different controller types respond to disturbances and their effects on reducing offset and oscillation in controlled processes.
Uploaded by
FakhrulShahrilEzanieCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
100% found this document useful (2 votes)
610 views35 pagesFeedback Controllers Overview
This document provides an overview of feedback controllers, including:
1. It explains the basic concepts of proportional (P), integral (I), and derivative (D) controllers and how they work individually and together in PID controllers.
2. It discusses the advantages and disadvantages of P, PI, and PID controllers and how they reduce errors and improve stability in feedback control systems.
3. It provides examples of how different controller types respond to disturbances and their effects on reducing offset and oscillation in controlled processes.
Uploaded by
FakhrulShahrilEzanieCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd