You might also like
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Me55 Control Engineering: Sharanabasava C PilliDocument12 pagesMe55 Control Engineering: Sharanabasava C PilliS C PilliNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Lecture 02 AV-356 System ModelingDocument28 pagesLecture 02 AV-356 System ModelingUsama NazirNo ratings yet
- Unit 1 - Control System - WWW - Rgpvnotes.inDocument12 pagesUnit 1 - Control System - WWW - Rgpvnotes.invikram singhNo ratings yet
- Introduction Review of Laplace TransformsDocument35 pagesIntroduction Review of Laplace TransformsVeilNo ratings yet
- Teknik Kendali Digital PDFDocument230 pagesTeknik Kendali Digital PDFWahyu Juliarto100% (3)
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Papers1 Semister2Document25 pagesPapers1 Semister2Matondo ReubenNo ratings yet
- Chapter 1-Introduction To Control SystemDocument12 pagesChapter 1-Introduction To Control SystemMustafa ManapNo ratings yet
- Chapter 8 - Feedback ControllerDocument35 pagesChapter 8 - Feedback ControllerFakhrulShahrilEzanieNo ratings yet
- Feedback and Control SystemsDocument33 pagesFeedback and Control SystemsJullie Mae MierNo ratings yet
- Cs-Module 1 NotesDocument58 pagesCs-Module 1 NotesSuprithaNo ratings yet
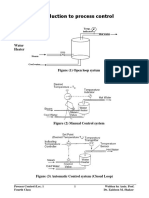
- Lect 1 Introduction To Process ControlDocument4 pagesLect 1 Introduction To Process ControlZaidoon MohsinNo ratings yet
- Chapter 4 ControlDocument44 pagesChapter 4 ControlFootball HDNo ratings yet
- ME 5659 Scribed NotesDocument8 pagesME 5659 Scribed NotesMayur BhiseNo ratings yet
- Mathematical Modeling in Control System: Sistem Kendali - 14S3211 Week 2 Session 1Document25 pagesMathematical Modeling in Control System: Sistem Kendali - 14S3211 Week 2 Session 1mikhaelNo ratings yet
- Introduction To Linear Control System PDFDocument13 pagesIntroduction To Linear Control System PDFAmitava BiswasNo ratings yet
- Control Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectDocument157 pagesControl Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriNo ratings yet
- CHAPTER 1: Plant Process Characterization and PID: TheoryDocument10 pagesCHAPTER 1: Plant Process Characterization and PID: Theorynttu53No ratings yet
- Pic FBDocument65 pagesPic FBSamaid AbdullahNo ratings yet
- Presentation For ControllerDocument42 pagesPresentation For ControllerAlakshendra JohariNo ratings yet
- Control System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorDocument100 pagesControl System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorSudhanshu SinghNo ratings yet
- Chapter 1& 2 Control System Concepts and Review of Laplace TransformDocument7 pagesChapter 1& 2 Control System Concepts and Review of Laplace TransformFasika TegegnNo ratings yet
- Control Lecture1 PDFDocument81 pagesControl Lecture1 PDFDr-Khalid Al-ShemmariNo ratings yet
- 2 Automatic ControllersDocument26 pages2 Automatic ControllersCupa no DensetsuNo ratings yet
- Introduction To PID Control: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwanDocument32 pagesIntroduction To PID Control: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwandaswkNo ratings yet
- DC Motor Speed Control Using PIDDocument25 pagesDC Motor Speed Control Using PID2K19/EE/259 TUSHARNo ratings yet
- Automated Control Resumen Unidd IVDocument23 pagesAutomated Control Resumen Unidd IVRakgnar LodbrokNo ratings yet
- Assistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit UniversityDocument39 pagesAssistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit Universityaditee saxenaaNo ratings yet
- PID Controllers: System Dynamics and ControlDocument33 pagesPID Controllers: System Dynamics and ControlRuturaj BadalNo ratings yet
- Lab 5 - Controls and Feedback: BackgroundDocument6 pagesLab 5 - Controls and Feedback: BackgroundABamisheNo ratings yet
- PID Controller - DC MotorDocument6 pagesPID Controller - DC MotorKrutika GiteNo ratings yet
- Pid Control ch8 PDFDocument22 pagesPid Control ch8 PDFGholamreza IlkhaniNo ratings yet
- Lecture 04 Feedback Control System CharacteristicsDocument23 pagesLecture 04 Feedback Control System Characteristicscesar ruizNo ratings yet
- Process Control CHP5Document29 pagesProcess Control CHP5Martha AlbaNo ratings yet
- Servomechanism and Control B PDFDocument7 pagesServomechanism and Control B PDFAshok BansalNo ratings yet
- Experiment: ObjectiveDocument3 pagesExperiment: ObjectiveVivek PatelNo ratings yet
- Control Systems Lab Manual - With Challenging ExperimentsDocument132 pagesControl Systems Lab Manual - With Challenging ExperimentsP POORNA CHANDRA REDDYNo ratings yet
- Control SystemDocument11 pagesControl Systembalaji1986No ratings yet
- OpuNarcisse DigitalFeedbackControlDocument10 pagesOpuNarcisse DigitalFeedbackControlDario Jose Gonzalez GuacareNo ratings yet
- Assignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaDocument4 pagesAssignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaSyed AfzalNo ratings yet
- Control 4 DR - GhanemDocument131 pagesControl 4 DR - Ghanemabdulqadir100% (1)
- Matlab PaperDocument8 pagesMatlab PapersusmarohiNo ratings yet
- 1) 1 Order Systems Parameter Changes (K and A)Document9 pages1) 1 Order Systems Parameter Changes (K and A)Ali El-GazzarNo ratings yet
- Control Systems U2 (TEL306)Document80 pagesControl Systems U2 (TEL306)Ruvenderan SuburamaniamNo ratings yet
- Unit 3Document67 pagesUnit 3Raghul T100% (1)
- Process Chapter 3Document35 pagesProcess Chapter 3Estifanos FitsumNo ratings yet
- ERT 321 Process Control & Dynamics: Feedback ControllersDocument34 pagesERT 321 Process Control & Dynamics: Feedback Controllershakita86No ratings yet
- Tuning PID controllers for level control of a nonlinear tank modelDocument9 pagesTuning PID controllers for level control of a nonlinear tank modelIsraelNo ratings yet
- Instrumentation and Process Control Sample ChaptersDocument18 pagesInstrumentation and Process Control Sample ChaptersGurunath EpiliNo ratings yet
- 1.2 Automatic Load Frequency Control: Department of Electrical Engineering, S.I.E.T, DhenkanalDocument6 pages1.2 Automatic Load Frequency Control: Department of Electrical Engineering, S.I.E.T, DhenkanalManikant MadhusudanNo ratings yet
- Proportional Integral Derivative PID ControlsDocument13 pagesProportional Integral Derivative PID Controlsapi-376515075% (4)
- PID Intech-Pid Control Theory PDFDocument18 pagesPID Intech-Pid Control Theory PDFDragoș TomaNo ratings yet
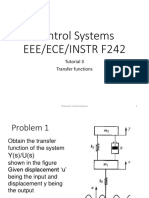
- Tutorial 3 Questions PDFDocument6 pagesTutorial 3 Questions PDFKartik MahajanNo ratings yet
- Tutorial 3 Questions PDFDocument6 pagesTutorial 3 Questions PDFKartik MahajanNo ratings yet
- Microeconomics Assignment 1 SolutionsDocument2 pagesMicroeconomics Assignment 1 SolutionsKartik MahajanNo ratings yet
- IE Assign1 PDFDocument3 pagesIE Assign1 PDFKartik MahajanNo ratings yet
- IE Assign1 PDFDocument3 pagesIE Assign1 PDFKartik MahajanNo ratings yet
- Financial Health of An Organization (Dr. Reddy'S Laboratories)Document6 pagesFinancial Health of An Organization (Dr. Reddy'S Laboratories)Kartik MahajanNo ratings yet
- 3140507Document3 pages3140507Pradeep SutharNo ratings yet
- Briske Et Al 2003 (JAE) - Vegetation Dynamics On Rangelands A Critique ofDocument14 pagesBriske Et Al 2003 (JAE) - Vegetation Dynamics On Rangelands A Critique ofPaulo MendesNo ratings yet
- History of Artificial IntelligenceDocument6 pagesHistory of Artificial IntelligenceSulekha MahatoNo ratings yet
- Neural Network Based Closed Loop Speed Control of DC Motor Using Arduino Uno.Document4 pagesNeural Network Based Closed Loop Speed Control of DC Motor Using Arduino Uno.seventhsensegroupNo ratings yet
- APJ ABDUL KALAM TECHNOLOGICAL UNIVERSITY CURRICULUM FOR B.TECH MECHANICAL ENGINEERINGDocument8 pagesAPJ ABDUL KALAM TECHNOLOGICAL UNIVERSITY CURRICULUM FOR B.TECH MECHANICAL ENGINEERINGpremNo ratings yet
- 04 Elicitation, Elaboration, Use Case-19Document19 pages04 Elicitation, Elaboration, Use Case-19lovely personNo ratings yet
- Adityaraj Belhe VUDocument2 pagesAdityaraj Belhe VUROHANT NARANGNo ratings yet
- Case OverviewDocument10 pagesCase OverviewPhong NguyenNo ratings yet
- Adaptive Control Tutorial - SIAMDocument403 pagesAdaptive Control Tutorial - SIAMCrystal Nassouri80% (5)
- Study Guide Unit 3Document18 pagesStudy Guide Unit 3Jineth C. HettiarachchiNo ratings yet
- Carnot CycleDocument9 pagesCarnot CycleImran UnarNo ratings yet
- Chapter 5 Systems Analysis True/False QuestionsDocument35 pagesChapter 5 Systems Analysis True/False QuestionsJoseph Furia MushiNo ratings yet
- Conceptual Model of UMLDocument24 pagesConceptual Model of UMLsunnyvemulavadatrynow6506No ratings yet
- Quiz Questions on Systems Analysis and DesignDocument3 pagesQuiz Questions on Systems Analysis and Designjohn100% (2)
- The Rise of Artificial Intelligence - Rewiring The FutureDocument2 pagesThe Rise of Artificial Intelligence - Rewiring The FuturemathaceNo ratings yet
- MAR Bersama YTD Mei 2023Document127 pagesMAR Bersama YTD Mei 2023AnisaNo ratings yet
- SWE1002 Optimization-Techniques TH 1 AC40Document2 pagesSWE1002 Optimization-Techniques TH 1 AC40rayduhatraNo ratings yet
- Procurement and AI Article of JournalDocument17 pagesProcurement and AI Article of JournalNasarudinNo ratings yet
- Culture and OrganisationsDocument79 pagesCulture and OrganisationsDeveshiNo ratings yet
- SD and OO System Development OverviewDocument21 pagesSD and OO System Development Overviewsamiksha5singhalNo ratings yet
- Software EngineeringDocument8 pagesSoftware Engineering208r1a66f0No ratings yet
- DEL AAT NewDocument15 pagesDEL AAT NewAbitha Bala Subramani Dept of Artificial IntelligenceNo ratings yet
- Introduction & FundamentalsDocument157 pagesIntroduction & FundamentalsrhvenkatNo ratings yet
- The School As A Social SystemDocument17 pagesThe School As A Social Systemflammy_82No ratings yet
- Agile Scrum NotesDocument8 pagesAgile Scrum Notesmj.mahmadbhattiNo ratings yet
- Multi-Products Simulation Using ARENADocument9 pagesMulti-Products Simulation Using ARENAdevakiNo ratings yet
- Deep Learning Methods OverviewDocument12 pagesDeep Learning Methods OverviewOussama El B'charriNo ratings yet
- History of The PLC.: The Problems With RelaysDocument12 pagesHistory of The PLC.: The Problems With RelaysSergio Alejandro Roa MartinNo ratings yet
- Previous Years Question Answers (Upscpdf - Com)Document156 pagesPrevious Years Question Answers (Upscpdf - Com)Vivek SugandhNo ratings yet
- Assembly Line SchedulingDocument25 pagesAssembly Line Schedulingapi-19981779No ratings yet